1.本实用新型涉及玻璃加工设备技术领域,具体为一种玻璃制品加工用送料装置。
背景技术:
2.玻璃制品在加工之前往往堆砌在一起,需要人工将其搬运到切割工作台上,整个过程中需要几个人配合搬运,耗费时间和人力,且在人工搬运过程中容易出现配合失误,损坏玻璃,效率较低,因此提出一种自动上料、适应于不同尺寸玻璃制品的玻璃制品加工用送料装置。
技术实现要素:
3.鉴于背景技术中存在的技术问题,本实用新型提供一种自动上料、适应于不同尺寸玻璃的玻璃制品加工用送料装置。为实现上述目的,本实用新型提供了如下的技术方案:
4.一种玻璃制品加工用送料装置,包括用于放置玻璃制品的置料槽和下料机构;所述送料装置还包括滑槽、支板ⅰ、电机ⅰ、转动柄、转动轴、连接杆、滑动杆、固定杆;所述滑槽开口朝向水平方向,且该开口横截面为内侧底边较长的等腰梯形;所述滑槽内设有与该滑槽相适配的可在置料槽和下料机构之间水平移动的滑块;所述滑槽上设有l型通槽ⅰ;所述电机ⅰ通过支板ⅰ设于所述滑槽一侧位置处;所述转动柄一端通过转动轴与所述电机ⅰ输出轴传动相连,另一端与所述连接杆一端铰接;所述连接杆另一端通过铰链与所述滑块铰接;所述滑块上设有倾斜向下的通槽ⅱ;所述滑动杆一端穿过滑槽上l型通槽ⅰ并设有与所述滑槽一侧端面相抵触的限位块ⅰ,另一端穿过滑块上的通槽ⅱ并设有与滑块另一侧端面相抵触的限位块ⅱ;所述限位块ⅱ向外设有移动板;所述固定杆一端与所述移动板固定连接,另一端设有用于定位玻璃制品的取料机构。
5.所述取料机构包括支板ⅱ、十字块、电机ⅱ、转动盘、四个l型杆和取料件;所述支板ⅱ与所述固定杆下端固定连接;所述十字块设于所述支板ⅱ上、所述固定杆一侧位置处,该十字块内沿十字方向均匀设有四个凹槽;四个凹槽内设有与对应凹槽相适配的移动杆;所述电机ⅱ设于所述支板ⅱ下方;所述转动盘通过电机ⅱ可转动地设于所述十字块上方,且该转动盘上均匀设有四个弧形通槽呈扇叶式分布;四个移动杆一端均设有柱状凸起,另一端通过对应的l型杆连接对应的取料件;各柱状凸起的两端分别设于所述转动盘弧形通槽和十字块对应的凹槽内。
6.所述送料装置还包括电动伸缩杆、推板;所述电动伸缩杆固定端设于所述置料槽内部底面,自由端与所述推板连接。
7.所述下料机构采用传送带机构。
8.所述送料装置还包括真空泵和四个连接软管;各取料件采用真空吸盘;所述真空泵设于所述支板ⅱ下方;四个连接软管一端与所述真空泵的导气管连通,另一端与对应的真空吸盘内部相连通。
9.本实用新型的有益效果是:
10.1.本实用新型通过启动电机ⅰ,带动转动柄转动,在转动过程中通过连接杆带动滑块在滑槽内左右移动,滑动杆在滑槽l型通槽ⅰ和滑块通槽ⅱ内往复移动,通过各真空吸盘吸附玻璃制品,实现从置料槽到传送带的自动送料,提高送料效率和稳定性;
11.2.通过启动电机ⅱ,转动盘转动,通过四个弧形通槽推动对应的柱状凸起使得对应的移动杆沿对应的十字块凹槽移动,从而使得移动杆上对应的真空吸盘相对于转动盘中心轴的距离同步增大或减小,从而适应于吸附不同尺寸的玻璃制品;
12.3.每当取完料,电动伸缩杆就伸长一个玻璃厚度的长度,带动放置玻璃制品的推板向上一个玻璃厚度的长度,便于取料机构下一次取料。
附图说明
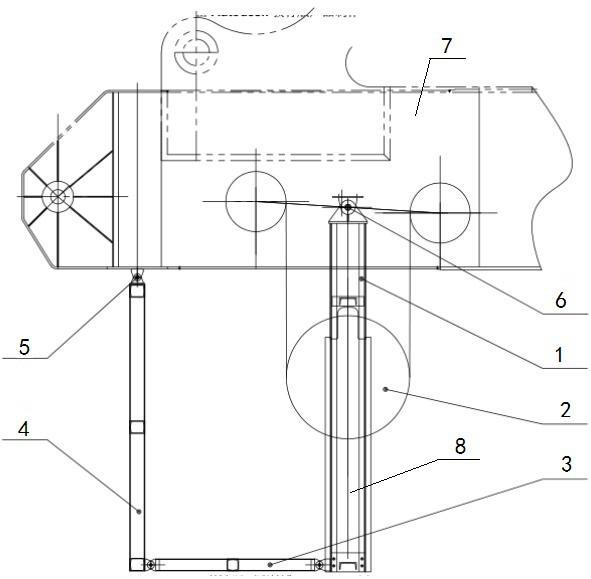
13.图1是本实用新型送料装置结构示意图(初始状态);
14.图2是图1的正视图(在置物槽取料状态);
15.图3是图1的侧视图;
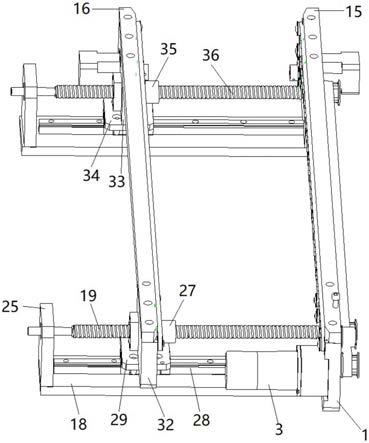
16.图4是本实用新型中取料机构的结构示意图;
17.图5是本实用新型中十字块的结构示意图;
18.图中,1
‑
传送带机构,2
‑
置料槽,3
‑
支腿,4
‑
滑槽,401
‑
l型通槽ⅰ,5
‑
支板ⅰ,6
‑
电机ⅰ,7
‑
转动柄,8
‑
连接杆,9
‑
铰链,10
‑
限位块ⅱ,11
‑
固定杆,12
‑
移动板,13
‑
滑块,1301
‑
通槽ⅱ,14
‑
取料机构,15
‑
真空吸盘,16
‑
限位块ⅰ,17
‑
滑动杆,18
‑
支板ⅱ,19
‑
电机ⅱ,20
‑
真空泵,21
‑
连接软管,22
‑
l型杆,23
‑
移动杆,2301
‑
柱状凸起,24
‑
十字块,2401
‑
凹槽,25
‑
转动盘,2501
‑
弧形通槽。
具体实施方式
19.结合图1至5所示,一种玻璃制品加工用送料装置,包括用于放置玻璃制品的置料槽2和下料机构;送料装置还包括滑槽4、支板ⅰ5、电机ⅰ6、转动柄7、转动轴、连接杆8、滑动杆17、固定杆11;滑槽4下方设有若干支腿3;滑槽4开口朝向水平方向,且该开口横截面为内侧底边较长的等腰梯形,如图3所示;滑槽4内设有与该滑槽4相适配的可在置料槽2和下料机构之间水平移动的滑块13,较长的底长设于内侧,使得与之相适配的滑块13只能在滑槽4内左右滑动但无法在前后方向脱离滑槽4,便于限位;滑槽4上设有l型通槽ⅰ401;电机ⅰ6通过支板ⅰ5设于滑槽4一侧位置处;转动柄7一端通过转动轴(图中未画出)与电机ⅰ6输出轴传动相连,另一端与连接杆8一端铰接;连接杆8另一端通过铰链9与滑块13铰接;滑块13上设有倾斜向下的通槽ⅱ1301;如图3中局部剖视图所示,滑动杆17一端穿过滑槽4上l型通槽ⅰ401并设有与滑槽4一侧端面相抵触的限位块ⅰ16,另一端穿过滑块13上的通槽ⅱ1301并设有与滑块13另一侧端面相抵触的限位块ⅱ10(如图3所示的);限位块ⅱ10向外设有移动板12;固定杆11一端与移动板12固定连接,另一端设有用于定位玻璃制品的取料机构14,取料机构14通过移动板12和固定杆11跟随滑块13可在置料槽2和下料机构之间可水平移动同时沿滑槽4上l型通槽ⅰ401和滑块13倾斜向下的通槽ⅱ1301上下移动。
20.取料机构14包括支板ⅱ18、十字块24、电机ⅱ19、转动盘25、四个l型杆22和取料件;支板ⅱ18与固定杆11下端固定连接;十字块24设于支板ⅱ18上、固定杆11一侧位置处,该十字块24内沿十字方向均匀设有四个凹槽2401(如图5所示,四个凹槽并不交叉连通);四
个凹槽2401内设有与对应凹槽2401相适配的移动杆23;电机ⅱ19设于支板ⅱ18下方;转动盘25通过电机ⅱ19可转动地设于十字块24上方,转动盘25与十字块24中心同轴,如图4所示,且该转动盘25上均匀设有四个弧形通槽2501呈扇叶式分布;四个移动杆23一端均设有柱状凸起2301,另一端通过l型杆22连接对应的取料件,取料件下端面均低于真空泵20和电机ⅱ19下端面,避免真空泵20和电机ⅱ19与置料槽2里的玻璃相抵触;各柱状凸起2301的两端分别设于转动盘25弧形通槽2501和十字块24对应的凹槽2401内,通过转动盘25绕自身中心轴转动,通过四个弧形通槽2501推动对应的柱状凸起2301带动对应的移动杆23沿对应的十字块24凹槽2401移动,以实现四个取料件相对于转动盘25中心轴的距离同步增大或减小,从而适应于固定不同尺寸的玻璃。
21.送料装置还包括电动伸缩杆、推板(图中未画出);电动伸缩杆固定端设于置料槽2内部底面,自由端与推板连接,推板尺寸小于置料槽开口尺寸,待加工玻璃依次置于置料槽2内的推板上,每当取完料,电动伸缩杆就伸长一个玻璃厚度的长度,带动推板向上一个玻璃厚度的长度,便于取料机构14下一次取料。
22.下料机构采用传送带机构1,取料机构14将玻璃放置在传送带机构1的传送带上,送至下一工序。
23.送料装置还包括真空泵20和四个连接软管21;各取料件采用真空吸盘15;真空泵20设于支板ⅱ18下方;四个连接软管21一端与真空泵20的导气管连通,另一端与对应的真空吸盘15内部相连通。
24.如图1
‑
5所示,本实用新型工作原理和流程如下:
25.根据所需搬运的矩形或正方形玻璃尺寸,通过启动电机ⅱ19,转动盘25转动,通过四个弧形通槽2501推动对应的柱状凸起2301使得对应的移动杆23沿对应的十字块24凹槽2401移动,从而使得滑动杆17上对应的真空吸盘15相对于转动盘25中心轴的距离同步增大或减小,从而适应于不同尺寸的玻璃。
26.启动电机ⅰ6,带动转动柄7转动,在转动过程中通过连接杆8带动滑块13在滑槽4内左右移动,滑动杆17在滑槽4l型通槽ⅰ401和滑块13通槽ⅱ1301内往复移动。初始状态下,如图1所示,当转动柄7与连接杆8平行,转动轴(图中未画出,与电机ⅰ6输出轴同轴)与铰链9距离最大时,滑块13位于滑槽4内最右侧位置,当转动柄7开始顺时针转动,连接杆8带动滑块13向左移动,滑块13推动滑动杆17一端沿滑槽4l型通槽ⅰ401的水平部分从右向左运动,滑动杆17另一端部分位于滑块13通槽ⅱ1301的最上方,直至滑动杆17后端部分落入滑槽4l型通槽ⅰ401的竖直部分开始向下运动,带动滑动杆17前端沿滑块13倾斜向下的通槽ⅱ1301向下运动,直至转动柄7与连接杆8重合,转动轴与铰链9距离最小时,如图2所示,滑块13位于最左侧,滑动杆17一端位于滑槽4通槽ⅰ底端,另一端位于滑块13通槽ⅱ1301的底端,此时通过移动板12与滑动杆17固定相连的固定杆11下端的各真空吸盘15向下运动到最低点,在真空泵20的作用下,通过各连接软管21让各真空吸盘15吸附置料槽2内最上面一块玻璃,实现对玻璃的固定;当转动柄7继续顺时针转动,使得滑块13向右移动时,滑块13推动滑动杆17另一端沿滑块13的斜线通槽ⅱ1301向上运动,滑动杆17一端沿滑槽4l型通槽ⅰ401的竖直部分从下到上运动,直至滑动杆17一端落入滑槽4l型通槽ⅰ401的水平部分开始向右运动,滑动杆17另一端再次位于滑块13通槽ⅱ1301的最上方,滑块13向右运动,直至初始状态最右侧位置,关闭真空泵20,各真空吸盘15失去对玻璃的吸附作用,玻璃落在传送带上,被送至
下一工序。当转动柄7继续顺时针转动,当转动柄7与连接杆8平行,转动轴与铰链9距离最大时,如图1所示,继续往复运动,滑块13开始向左移动,此时电动伸缩杆伸长一个玻璃厚度的长度,带动推板向上一个玻璃厚度的长度,便于取料机构14下一次取料,当再次达到转动柄7与连接杆8重合,转动轴与铰链9距离最小时,取料机构中的四个真空吸盘15再次对第二个玻璃进行吸附。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。