1.本公开一般涉及机器人领域,尤其涉及一种机械手。
背景技术:
2.在当今社会,机器人的发展变得非常的迅速,其中一种机器人上由于安装有机械手,从而可以帮助工人完成特殊场景下对相应物体的抓取。但现有技术中采用电机驱动丝杠来带动机械手完成抓取动作,机械手在完成抓取动作中不平顺,且一般电机无法带动较大机械手抓取较重物体。
技术实现要素:
3.鉴于现有技术中的上述缺陷或不足,期望提供一种机械手,包括:
4.抓取组件,所述抓取组件用于抓取物体,其动作的面为第一平面;
5.控制组件,所述控制组件与所述抓取组件活动连接,且所述控制组件动作时带动所述抓取组件动作;
6.驱动组件,所述驱动组件用于驱动所述控制组件动作;
7.其中所述驱动组件包括:
8.机架,所述机架用于安装所述抓取组件;
9.液压缸,所述液压缸安装于所述机架内;
10.连接杆,所述连接杆铰接于所述液压缸的输出端和所述控制组件之间。
11.进一步,所述机架上设有垂直于所述液压缸输出方向的安装面,所述液压缸输出端设有螺纹凹槽;
12.所述驱动组件还包括旋转接头,所述旋转接头一端设有螺纹凸起,使其与所述液压缸输出端螺纹配合,另一端与所述连接杆铰接;
13.所述机械手还包括转动组件,所述转动组件用于带动所述抓取组件在平行于所述安装面的面内转动,所述转动组件包括:
14.齿轮组,由若干相互啮合的齿轮组成,所述齿轮通过垂直于所述安装面的中心轴可转动的连接于所述安装面上,所述齿轮组中包括输入齿轮和输出齿轮;
15.步进电机,所述步进电机的输出端与所述输入齿轮中心轴固定连接;
16.转接件,所述转接件的一端与所述输出齿轮中心轴固定连接并沿所述输出齿轮径向延伸,所述转接件的另一端用于安装所述抓取组件;
17.所述输出齿轮与所述旋旋转接头同轴设置。
18.进一步,所述抓取组件包括:
19.手指基座,所述手指基座一端固定于所述转接件的另一端;
20.指根,所述指根一端与所述手指基座另一端铰接;
21.指中,所述指中一端与所述指根另一端铰接;
22.指尖,所述指尖一端与所述指中另一端铰接;
23.进一步,所述抓取组件上用于抓取物体的一侧为抓取侧,用于控制抓取动作的一侧为控制侧;
24.所述控制组件设于所述控制侧,包括:
25.传动机构,所述传动机构用于控制所述抓取组件抓住所述物体;
26.回弹机构,所述回弹机构用于控制所述抓取组件在抓取所述物体时的姿态。
27.进一步,所述传动机构包括:
28.第一传动杆,所述第一传动杆的一端铰接于第一铰接轴,所述第一铰接轴为所述指根与所述手指基座的铰接轴;
29.第二传动杆,所述第二传动杆的一端与所述第一传动杆的另一端铰接;
30.第三传动杆,所述第三传动杆的一端铰接于第二铰接轴,所述第二传动杆的另一端铰接于所述第三传动杆上远离所述第二铰接轴的位置,所述第二铰接轴为所述指根与所述指中的铰接轴;
31.第四传动杆,所述第四传动杆的一端与所述第三传动杆的另一端铰接,另一端铰接于所述指尖的控制侧;
32.所述连接杆远离所述转接头的一端铰接于所述第一传动杆上远离所述第一铰接轴的位置。
33.进一步,所述回弹机构包括:
34.第一回弹杆,所述第一回弹杆的一端铰接于所述第一铰接轴;
35.第二回弹杆,所述第二回弹杆的一端铰接于所述第一回弹杆的另一端;
36.第三回弹杆,所述第三回弹杆的一端铰接于所述第二铰接轴,另一端与所述第二回弹杆的另一端铰接;
37.第四回弹杆,所述第四回弹杆的一端铰接于所述第三回弹杆上远离所述第二铰接轴的位置;
38.第五回弹杆,所述第五回弹杆的一端铰接于第三铰接轴,所述第三铰接轴为所述指中与所述指尖的铰接轴,另一端与所述第四回弹杆的另一端铰接;
39.抵接部,所述抵接部设于所述指尖的控制侧;
40.第一弹性部件,所述第一弹性部件一端固定于所述手指基座上,另一端固定于所述第一回弹杆上远离所述第一铰接轴的位置;
41.第二弹性部件,所述第二弹性部件的一端固定于所述第五回弹杆上,另一端固定于所述抵接部上,所述第二弹性部件用于将所述抵接部抵接在所述第五回弹杆上;
42.进一步,所述安装面上设有限位件,所述限位件用于限定所述手指基座的活动范围。
43.进一步,还包括手掌板,所述手掌板通过支撑块连接于所述安装面上,且与所述安装面平行,所述手掌板设于所述转接件与所述第一铰接轴之间。
44.进一步,所述安装面上设有基座安装件,用于安装所述手指基座。
45.进一步,所述抓取组件、所述控制组件和所述驱动组件分别有多组,并沿所述机架周向设置。
46.根据本技术的有益效果在于:
47.所述液压缸安装于所述机架内,又所述连接杆铰接于所述液压缸输出端与所述控
制组件之间,因此通过操控所述液压缸动作,所述液压缸输出端带动所述连接杆动作,所述连接杆带动所述控制组件动作,所述控制组件又与所述抓取组件活动连接,所述控制组件带动所述抓取组件动作,进而完成对物体的抓取。由于液压缸本身具有动作平顺和推力较大的特点,因此所述机械手可用于抓取较重的物体,且抓取的过程较为平顺。
附图说明
48.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
49.图1为本技术提供的机械手的整体结构示意图;
50.图2为图1所示的机械手的转动组件的结构示意图;
51.图3为图1所示的机械手的抓取组件和控制组件的结构示意图;
52.图4为图1所示的机械手抓取较大物体时抓取组件与物体非接触时的示意图;
53.图5为图1所示的机械手抓取较大物体时指根与物体接触时的示意图;
54.图6为图1所示的机械手抓取较大物体时指根、指中与物体接触时的示意图;
55.图7为图1所示的机械手抓取较大物体时指根、指中和指尖与物体接触时的示意图;
56.图8为图1所示的机械手抓取较小物体时指尖与物体非接触时的示意图;
57.图9为图1所示的机械手抓取较小物体时指尖与物体接触时的示意图。
58.图中标号:31,机架;32,液压缸;33,连接杆;310,安装面;34,旋转接头;411,输入齿轮;412,输出齿轮;42,步进电机;43,转接件;11,手指基座;12,指根;13,指中;14,指尖;211,第一传动杆;10,第一铰接轴;212,第二传动杆;213,第三传动杆;20,第二铰接轴;214,第四传动杆;221,第一回弹杆;222,第二回弹杆;223,第三回弹杆;224,第四回弹杆;225,第五回弹杆;30,第三铰接轴;226,抵接部;227,第一弹性部件;228,第二回弹部件;311,限位件;5,手掌板;312,基座安装件。
具体实施方式
59.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
60.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
61.请参考图1,为本技术提供的一种机械手,包括:
62.抓取组件,所述抓取组件用于抓取物体,其动作的面为第一平面;
63.控制组件,所述控制组件与所述抓取组件活动连接,且所述控制组件动作时带动所述抓取组件动作;
64.驱动组件,所述驱动组件用于驱动所述控制组件动作;
65.其中所述驱动组件包括:
66.机架31,所述机架31用于安装所述抓取组件;
67.液压缸32,所述液压缸32安装于所述机架31内;
68.连接杆33,所述连接杆33铰接于所述液压缸32的输出端和所述控制组件之间。
69.所述液压缸32安装于所述机架31内,又所述连接杆33铰接于所述液压缸32输出端与所述控制组件之间,因此通过操控所述液压缸32动作,所述液压缸32输出端带动所述连接杆33动作,所述连接杆33带动所述控制组件动作,所述控制组件又与所述抓取组件活动连接,所述控制组件带动所述抓取组件动作,进而完成对物体的抓取。由于液压缸32本身具有动作平顺和推力较大的特点,因此所述机械手可用于抓取较重的物体,且抓取的过程较为平顺。
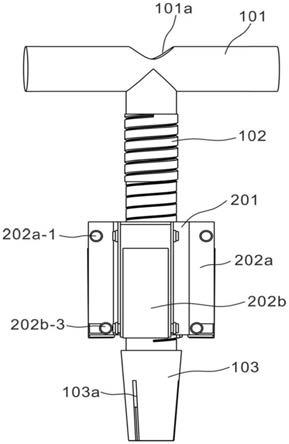
70.如图2所示,其中在对所述抓取组件进行转动的优选实施方式中,所述机架31上设有垂直于所述液压缸32输出方向的安装面310,所述液压缸32输出端同轴设有螺纹凹槽;
71.所述驱动组件还包括旋转接头34,所述旋转接头34的一端同轴设有螺纹凸起,使其与所述液压缸32输出端螺纹配合,另一端与所述连接杆33铰接;
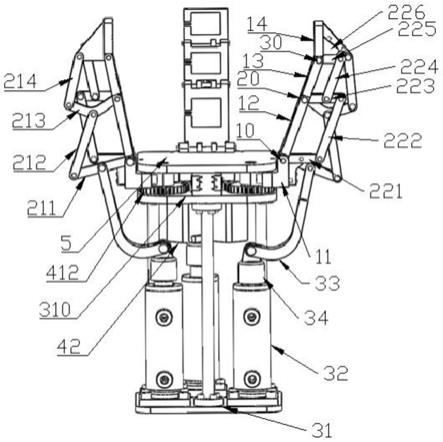
72.所述机械手还包括转动组件,所述转动组件设于所述机架31与所述抓取组件之间,所述转动组件包括:
73.齿轮组,由若干相互啮合的齿轮组成,所述齿轮通过垂直于所述安装面310的中心轴可转动的连接于所述安装面310上,所述齿轮组中包括输入齿轮411和输出齿轮412;
74.步进电机42,所述步进电机42的输出端与所述输入齿轮411中心轴固定连接;
75.转接件43,所述转接件43的一端与所述输出齿轮412中心轴固定连接,并沿所述输出齿轮412径向延伸,所述转接件43的另一端用于安装所述抓取组件;
76.所述输出齿轮412和所述旋转接头34同轴设置。
77.由于所述步进电机42的输出端与所述输入齿轮411中心轴固定连接,所述步进电机42用于驱动所述输入齿轮411转动,所述输入齿轮411通过所述齿轮组中相互啮合的齿轮,带动所述输出齿轮412转动,由于所述输出齿轮412中心轴与所述转接件43的一端固定连接,所述转接件43沿所述输出齿轮412径向延伸,所述转接件43的另一端用于安装所述抓取组件,因此所述输出齿轮412的转动,带动所述抓取组件的转动;当所述抓取组件转动时,由于所述抓取组件与所述控制组件活动连接,所述控制组件用于带动所述抓取组件在所述第一平面内动作,又所述连接杆33铰接于所述液压缸32与所述控制组件之间,所以所述转接件43的转动带动所述抓取组件转动,进而带动所述控制组件转动,进而带动所述连接杆33转动;又因为所述液压缸32输出端同轴设有螺纹凹槽,所述旋转接头34的一端同轴设有螺纹凸起,使其与所述液压缸32输出端螺纹配合,所述旋转接头34的另一端与所述连接杆33铰接,因此所述连接杆33转动,带动所述旋转接头34的转动,所述旋转接头34与所述液压缸32输出端的螺纹连接,所述输出齿轮412和所述旋转接头34同轴设置,保证了整个转动过程能够实现。优选地,所述输入齿轮411半径小于所述输出齿轮412半径,所述输入齿轮411的扭矩被所述输出齿轮412放大,进而所述机械手可以抓取较重物体。
78.如图3中所示,其中在抓取组件的优选实施方式中,所述抓取组件包括:
79.手指基座11,所述手指基座11一端固定于所述转接件43的另一端;
80.指根12,所述指根12一端与所述手指基座11另一端铰接;
81.指中13,所述指中13一端与所述指根12另一端铰接;
82.指尖14,所述指尖14一端与所述指中13另一端铰接;
83.所述手指基座11用于将所述抓取组件整体固定于所述转接件43上,所述指根12铰
接于所述手指基座11与所述指中13之间,所述指中13铰接于所述指根12与所述指尖11之间,这样的结构更加灵活,与被抓取物体的接触面更大。在抓取不同形状、尺寸的物体时更加方便。
84.其中在所述控制组件的优选实施方式中,所述抓取组件上用于抓取物体的一侧为抓取侧,用于控制抓取动作的一侧为控制侧;
85.所述控制组件设于所述控制侧,包括:
86.传动机构,所述传动机构用于控制所述抓取组件抓住所述物体;
87.回弹机构,所述回弹机构用于控制所述抓取组件在抓取所述物体时的姿态。
88.所述控制组件设于所述控制侧,当所述控制组件动作时,带动所述抓取组件在所述第一平面内动作,又所述控制组件包括所述传动机构和所述回弹机构,当需要抓取物体时,驱动组件带动所述传动组件动作,所述传动组件带动所述抓取组件做出抓取动作;由于需要抓取的物体的形状和尺寸有时会有不同,在所述抓取组件在抓取的过程中用于接触物体的部件也有所不同,又由于所述回弹组件的作用,所述抓取组件整体姿态在抓取动作中被有效控制,进而所述机械手可用于抓取不同形状和尺寸的物体。
89.其中在所述传动机构的优选实施方式中,所述传动机构包括:
90.第一传动杆211,所述第一传动杆211的一端铰接于第一铰接轴10,所述第一铰接轴10为所述指根12与所述手指基座11的铰接轴;
91.第二传动杆212,所述第二传动杆212的一端与所述第一传动杆211的另一端铰接;
92.第三传动杆213,所述第三传动杆213的一端铰接于第二铰接轴20,所述第二传动杆212的另一端铰接于所述第三传动杆213上远离所述第二铰接轴20的位置,所述第二铰接轴20为所述指根12与所述指中13的铰接轴;
93.第四传动杆214,所述第四传动杆214的一端与所述第三传动杆213的另一端铰接,另一端铰接于所述指尖14的控制侧;
94.所述连接杆33远离所述旋转接头34的一端铰接于所述第一传动杆211上远离所述第一铰接轴10的位置。
95.由于所述连接杆33远离所述旋转接头34的一端铰接于所述第一传动杆211上远离所述第一铰接轴10的位置,因此所述连接杆33动作,带动所述第一传动杆211沿所述第一铰接轴10转动,又所述第二传动杆212的一端与所述第一传动杆211的另一端铰接,所述第三传动杆213的一端铰接于第二铰接轴20,所述第二传动杆212的另一端铰接于所述第三传动杆213上远离所述第二铰接轴20的位置,因此所述第一传动杆211动作,带动所述第二传动杆212动作,进而带动所述第三传动杆213绕所述第二铰接轴20转动。又由于所述第四传动杆214的一端与所述第三传动杆213的另一端铰接,另一端铰接于所述指尖14的控制侧,所述第三传动杆213的转动带动所述第四传动杆动作,进而给所述指尖14一个第一推力,所述第一推力又通过所述指尖14传至所述指中13,进而通过所述指中13传至所述指根12,使得所述指尖14、所述指中13和所述指根12组成的整体有在所述第一平面内动作的趋势。所述传动结构与所述抓取组件配合,将所述驱动组件提供的动力有效传送至所述抓取组件中的所述指尖14、所述指中13和所述指根12上。解决了所述抓取组件在动作时的动力问题。
96.其中在所述回弹机构的优选实施方式中,所述回弹机构包括:
97.第一回弹杆221,所述第一回弹杆221的一端铰接于所述第一铰接轴10;
98.第二回弹杆222,所述第二回弹杆222的一端铰接于所述第一回弹杆221的另一端;
99.第三回弹杆223,所述第三回弹杆223的一端铰接于所述第二铰接轴20,另一端与所述第二回弹杆222的另一端铰接;
100.第四回弹杆224,所述第四回弹杆224的一端铰接于所述第三回弹杆223上远离所述第二铰接轴20的位置;
101.第五回弹杆225,所述第五回弹杆225的一端铰接于第三铰接轴30,所述第三铰接轴30为所述指中13与所述指尖14的铰接轴,另一端与所述第四回弹杆224的另一端铰接;
102.抵接部226,所述抵接部226设于所述指尖14的控制侧;
103.第一弹性部件227,所述第一弹性部件227一端固定于所述手指基座11上,另一端固定于所述第一回弹杆221上远离所述第一铰接轴10的位置;
104.第二弹性部件228,所述第二弹性部件228的一端固定于所述第五回弹杆225上,另一端固定于所述抵接部226上,所述第二弹性部件228用于将所述抵接部226抵接在所述第五回弹杆225上;
105.如前述中,所述指尖14在受到所述第一推力后,有绕所述第三铰接轴30转动的趋势,又由于所述第二弹性部件228的作用,所述抵接部226与所述第五回弹杆225抵接,所述指尖14与所述指中13之间的角度保持不变,进而所述指中13与所述指尖14的整体有绕所述第二铰接轴20转动地趋势,又由于所述第二传动杆212在动作时推动所述第三传动杆213动作,所述第三传动杆213动作时既推动所述第四传动杆214动作,又给所述第二铰接轴一个第二推力,所述第二推力作用下,抵消了所述指中13与所述指尖14的整体在所述第二铰接轴20处的转动趋势,进而所述指根12、所述指中13和所述指尖14作为整体有绕所述第一铰接轴10转动地趋势。又由于所述第一弹性部件227对所述第一回弹杆221的作用,当所述指根12、所述指中13和所述指尖14作为整体绕所述第一铰接轴10发生转动时,所述第一回弹杆221与安装面310之间的角度保持不变,进而所述第三回弹杆223、所述第五回弹杆225、所述抵接部226、所述指尖14与所述安装面310之间的角度变化最小。这样,在所述抓取组件完成抓取动作过程中,有利于仅通过所述指尖14就能完成对尺寸较小物体的抓取。
106.优选地,所述第一回弹杆221、所述第三回弹杆223和所述第五回弹杆225平行,且所述第二回弹杆222与所述指根12平行,所述第四回弹杆224与所述指中13平行。优选地,所述抵接部226与所述第五回弹杆225抵接时,所述之间14垂直于所述安装面310。如图4
‑
图7中所示,当所述机械手抓取较大物体时,所述抓取组件的所述指根12、所述指中13和所述指尖14逐步与物体接触,完成抓取动作。首先,当所述连接杆33带动所述第一传动杆211向上移动时,所述指根12、所述指中13和所述指尖14作为整体绕所述第一铰接轴10发生转动,所述抓取组件的所述指根12、所述指中13和所述指尖14逐步与物体接触,此过程中所述指尖14与所述安装面310之间的角度保持不变。这样所述机械手可以在抓取较大尺寸的各种形状物体时具有较强的适应性。如图8和图9中所示,当所述机械手抓取较小物体时,仅需用所述指尖14接触物体,所述指尖14给物体的力平行于所述安装面310,物体在被抓取后不会产生垂直于所述安装面的运动趋势,使得所述机械手对尺寸较小的物体抓取更加稳定。
107.其中在限定所述抓取组件转动范围的优选实施方式中,所述安装面310上设有限位件311,所述限位件311用于限定所述手指基座11的转动范围。
108.当所述抓取组件在所述转动组件的带动下以所述转接件43为半径,绕所述输出齿
轮412转动时,由于所述安装面310上设有限位件311,所述抓取组件仅能在设定范围内移动,便于针对需抓物体的尺寸来调整所述机械手张开的幅度。
109.其中在增加所述机械手与被抓物体接触面积的优选实施方式中,还包括手掌板5,所述手掌板5通过支撑块连接于所述安装面310上,且与所述安装面310平行,所述手掌板5设于所述转接件43与所述第一铰接轴10之间。
110.由于所述手掌板5通过支撑块连接于所述安装面310上,且与所述安装面310平行,所述手掌板5设于所述转接件43与所述第一铰接轴10之间。因此所述转动组件可以设于所述手掌板5与所述安装面310之间,且当所述抓取组件抓取较大物体时,所述手掌板5与所述抓取组件组成的抓取结构会使对物体的抓取更加牢靠。
111.其中在所述抓取组件安装方式的优选实施方式中,所述安装面310上设有基座安装件312,用于安装所述手指基座11。
112.所述安装面310上设有基座安装件312,用于安装所述手指基座11。当所述机械手的使用场景较为固定时,即所述抓取组件无需频繁调整位置时,可将所述抓取组件固定于所述基座安装件312上,这样既节省了多余的部件投入,又降低了所述机械手的故障率。
113.其中在所述机械手用于抓取物体的部分的优选实施方式中,所述抓取组件、所述控制组件和所述驱动组件分别有多组,并沿所述机架31周向设置。
114.由于所述抓取组件、所述控制组件和所述驱动组件分别有多组,并沿所述机架31周向设置,所述机械手用于抓取的部分增多,与被抓物体之间的接触面积也增大,有利于物体的抓取更为牢固。
115.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。