1.本发明涉及建筑机械控制技术领域,特别是一种可视化塔吊控制系统及控制方法。
背景技术:
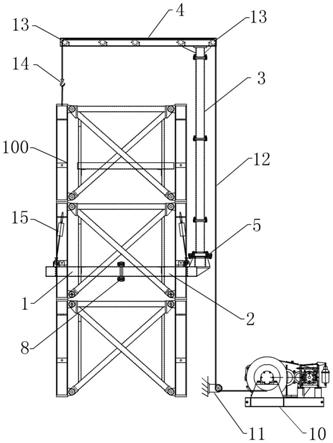
2.目前常见的塔吊结构如图3所示,包括塔基11、塔身12、平臂13、第一驱动装置(图中未示出)、小车15、第二驱动装置(图中未示出)和吊物组件。塔基11固定安装在地面上。塔身12固定连接在塔基11上端。平臂13通过第一驱动装置可转动的连接在塔身12上端,平臂13在第一驱动装置的驱动下做水平面上的转动,平臂13以转动连接点为界,两端分别为平衡臂段131和起重臂段132。小车15通过第二驱动装置活动连接在平臂13的起重臂段132上,小车15在第二驱动装置的驱动下沿着平臂13的起重臂段132做往复直线运动。吊物组件包括钢缆171、第三驱动装置(图中未示出)和吊钩173,钢缆171设置在小车15下端,并通过第三驱动装置与小车15关联,吊钩连接在钢缆171下端,通过第三驱动装置控制钢缆171的收线或放线,进而控制吊钩173做竖直升降移动。
[0003][0004]
塔吊驾驶员需在位于高空的小车中控制塔吊,一方面,驾驶员高空作业存在一定的安全隐患,驾驶员高空作业精神长时间处于高度紧张状态,容易产生疲劳感;另一方面,吊取物件时,通常是通过驾驶员本人肉眼观察、驾驶员本人经验分析、地面人员通过对讲机联络驾驶员等方式辅助吊取物件,这种方式比较粗放和原始,吊取物件的效率和成功率较大程度上依赖驾驶员的个人能力;再一方面,驾驶员操控塔吊执行各种动作的时候存在一定的误操作几率,若因误操作撞到障碍物或伤害到人,后果不堪设想。
技术实现要素:
[0005]
本发明的目的是克服现有技术的不足,而提供一种可视化塔吊控制系统及控制方法,它解决了目前的塔吊控制方式比较粗放和原始,吊运物件的效率难以保障,存在一定的误操作几率的问题。
[0006]
本发明的技术方案是:可视化塔吊控制系统,包括塔吊;塔吊包括塔基、塔身、平臂、第一驱动装置、小车、第二驱动装置和吊物组件;塔基固定安装在地面上;塔身固定连接在塔基上端;平臂通过第一驱动装置可转动的连接在塔身上端,平臂在第一驱动装置的驱动下做水平面上的转动,平臂以转动连接点为界,两端分别为平衡臂段和起重臂段;小车通过第二驱动装置活动连接在平臂的起重臂段上,小车在第二驱动装置的驱动下沿着平臂的起重臂段做往复直线运动;吊物组件包括钢缆、第三驱动装置和吊钩,钢缆设置在小车下端,并通过第三驱动装置与小车关联,吊钩连接在钢缆下端,通过第三驱动装置控制钢缆的收线或放线,进而控制吊钩做竖直升降移动;其还包括吊物辅助支持组件、安全监测组件、pc机、单片机;吊物辅助支持组件包括摄像头a、摄像头b、摄像头c及毫米波雷达;摄像头a安装在
塔身上,其用于获取塔身周边的地面及空中的视野,摄像头b安装在起重臂段下端,其用于获取起重臂段的下部区域的视野,摄像头c安装在小车下端,其用于获取吊钩及吊钩正下方的视野;毫米波雷达安装在起重臂段下端,其用于获取起重臂段的下部区域的障碍物分布情况;安全监测组件包括激光测距模块、平臂变形检测模块、塔身倾斜检测模块及风力检测模块;两个激光测距模块分别安装在平臂起重臂段相对的两侧壁上,两个激光测距模块的光线射出方向均平行于起重臂段并向起重臂段末端延伸,其用于检测起重臂段的转动路径上是否存在阻挡物;平臂变形检测模块安装在起重臂段下端,其用于检测起重臂段的弯曲变形程度;塔身倾斜检测模块安装在塔身上,其用于检测塔身的弯曲变形程度;风力检测模块安装在塔身和/或平臂上,其用于检测风力等级;pc机分别与摄像头a、摄像头b、摄像头c、毫米波雷达通信连接,其用于对摄像头a、摄像头b、摄像头c获取的图像及毫米波雷达获取的雷达数据进行可视化展示;单片机的信号输入端分别与激光测距模块、平臂变形检测模块、塔身倾斜检测模块、风力检测模块通信连接,单片机的信号输出端分别与第一驱动装置、第二驱动装置、第三驱动装置、pc机通信连接。
[0007]
本发明进一步的技术方案是:pc机还包含快速帧抓取器和图像边缘计算模块;快速帧抓取器分别与摄像头a、摄像头b、摄像头c通信连接,以捕捉摄像头a、摄像头b、摄像头c拍摄的视频图像中的每一帧;图像边缘计算模块与快速帧抓取器通信连接,以对快速帧抓取器提取出的帧画面进行物体轮廓描边处理。
[0008]
本发明的技术方案是:一种塔吊控制方法,应用于上述的可视化塔吊控制系统,包括风险处置方法和可视化操控方法;可视化操控方法如下:a、通过摄像头a和摄像头b获取被吊物件周边的地面及空中的视野,通过摄像头c获取吊钩及吊钩正下方的视野,通过毫米波雷达获取被吊物件周边的障碍物分布情况雷达图;b、摄像头a、摄像头b、摄像头c、毫米波雷达的探测范围均为锥形,所述锥形的顶点即为摄像头a、摄像头b、摄像头c、毫米波雷达的位置所在,所述锥形的中心线与水平面所成夹角即为探测角度;则有,摄像头a的探测角度大于摄像头b的探测角度,摄像头c的探测角度为90
°
,毫米波雷达的探测角度与摄像头a的探测角度相同;c、摄像头a、摄像头b、摄像头c拍摄的图像,以及毫米波雷达获取的雷达图,均在与pc机连接的一台显示器的不同区域实时显示,或在与pc机连接的多台显示器上分别显示;风险处置方法如下:a、通过风力检测模块实时检测塔吊周边的风力等级,检测结果通过单片机传递至pc机;当风力大于6级时,由pc机发出预警,提示操作人员停止塔吊操作;当风力大于8级时,由单片机直接控制塔吊的第一驱动装置、第二驱动装置、第三驱动装置停止运行,使塔吊停止运行;b、通过塔身倾斜检测模块实时检测塔身的倾角,定义倾角为塔身与竖直平面所成夹角,设为r,塔吊空载的情况下,r为0
°
;当r的范围为
‑
0.2
°
<r<0.2
°
时,塔身的倾角在安全值范围内;当r≥1
°
或r≤
‑1°
时,由单片机直接控制塔吊的第一驱动装置、第二驱动装置、
第三驱动装置停止运行,使塔吊停止运行;当
‑1°
<r≤
‑
0.2
°
或0.2
°
≤r<1
°
时,pc机发出预警,提示操作人员停止塔吊操作;c、通过平臂变形检测模块实时检测起重臂段的弯曲变形程度,平臂变形检测模块为压力传感器,所述压力传感器安装在起重臂段中部下端,距离起重臂段末端距离为起重臂段全长的1/3,通过单片机设置警报阈值和停机阈值,警报阈值小于停机阈值;当塔吊空载时,起重臂段仅在自身重量下产生向下的弯曲变形,当塔吊吊运物件时,起重臂段在被吊物件及自身重量的共同作用下弯曲变形程度增大,对压力传感器施加的压力也相应增大,压力传感器的检测数值也相应增大;设定压力传感器的检测数值为f,当0<f<a时,起重臂段弯曲变形程度在安全范围内,当a≤f<b时,pc机发出预警,提醒操作人员停止塔吊操作,当f≥b时,由单片机同时执行以下几项控制:1、控制第一驱动装置停止运行,使平臂停止转动;2、控制第二驱动装置动作,将小车移动至远离起重臂段末端的极限位置,以减轻起重臂段的弯曲变形程度;3、控制第三驱动装置动作,使吊钩下放,将被吊物件放回地面上;d、通过激光测距模块检测起重臂段的转动路径上是否存在阻挡物,设定激光测距模块距离起重臂段末端的固有距离为s,激光测距模块的测距值为h,当h>s时,表示起重臂段的转动路径上不存在阻挡物,当h≤s时,表示起重臂段的转动路径上存在阻挡物;两个激光测距模块同时启动测距,以同一时间点测距值相对较小的激光测距模块作为判断基准;当h>s p时,表示起重臂段在转动过程中不会撞到障碍物;当h≤s p时,表示起重臂段在转动过程中存在撞上障碍物的风险,则由单片机控制第一驱动装置停止运行,使平臂停止转动;p为安全距离,取值范围为0.1~0.5m。
[0009]
本发明再进一步的技术方案是:快速帧抓取器抓取摄像头a、摄像头b、摄像头c拍摄图像中的帧画面,再通过图像边缘计算模块对帧画面进行物体轮廓描边处理,最后通过pc机的显示器呈现物体轮廓描边处理后的画面;所述的物体轮廓描边处理以画面中物体的形状或画面中的颜色阈值变化作为约束条件。
[0010]
本发明与现有技术相比具有如下优点:1、通过毫米波雷达和多个摄像头的组合,获取吊塔周边的视野及障碍物分布情况,操作人员基于摄像头获取的图像和毫米波雷达获取的雷达图,即可准确定位物料和把握作业现场环境信息,进而在地面操控室内就可以对塔吊进行远程精准高效的操控,降低了操作人员的工作强度。
[0011]
2、通过安全监测组件对塔吊的运行状态信息及外部环境信息进行监测,并建立了一整套完善的风险预警及处置流程,帮助操作人员实时了解到塔吊的状态信息,确保塔吊安全工作,极大提高了塔吊作业的安全性。
[0012]
以下结合图和实施例对本发明作进一步描述。
附图说明
[0013]
图1为本发明的结构示意图;图2为本发明各部件的通信连接关系示意图;图3为现有的塔吊结构示意图。
[0014]
图例说明:塔基11;塔身12;平臂13;平衡臂段131;起重臂段132;第一驱动装置14;小车15;第二驱动装置16;钢缆171;第三驱动装置172;吊钩173;摄像头a21;摄像头b22;摄像头c23;毫米波雷达24;激光测距模块31;平臂变形检测模块32;塔身倾斜检测模块33;风力检测模块34;pc机4;快速帧抓取器41;图像边缘计算模块42;单片机5。
具体实施方式
[0015]
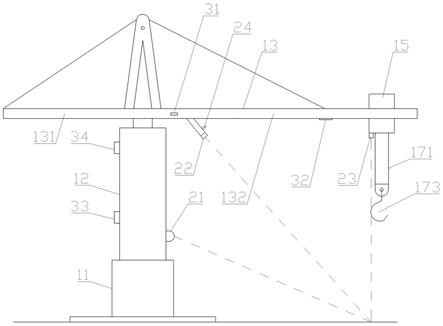
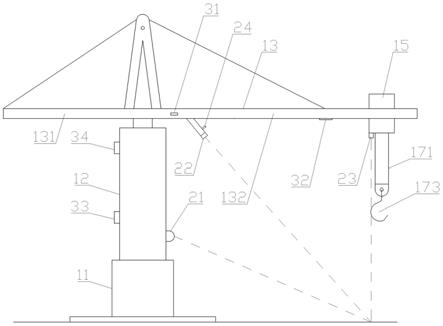
实施例1:如图1
‑
2所示,可视化塔吊控制系统,包括塔吊、吊物辅助支持组件、安全监测组件、pc机、单片机。
[0016]
塔吊包括塔基11、塔身12、平臂13、第一驱动装置14、小车15、第二驱动装置16和吊物组件。塔基11固定安装在地面上。塔身12固定连接在塔基11上端。平臂13通过第一驱动装置14可转动的连接在塔身12上端,平臂13在第一驱动装置14的驱动下做水平面上的转动,平臂13以转动连接点为界,两端分别为平衡臂段131和起重臂段132。小车15通过第二驱动装置16活动连接在平臂13的起重臂段132上,小车15在第二驱动装置16的驱动下沿着平臂13的起重臂段132做往复直线运动。吊物组件包括钢缆171、第三驱动装置172和吊钩173,钢缆171设置在小车15下端,并通过第三驱动装置172与小车15关联,吊钩173连接在钢缆171下端,通过第三驱动装置172控制钢缆171的收线或放线,进而控制吊钩173做竖直升降移动。
[0017]
吊物辅助支持组件包括摄像头a21、摄像头b22、摄像头c23及毫米波雷达24。摄像头a21安装在塔身12上,其用于获取塔身12周边的地面及空中的视野,摄像头b22安装在起重臂段132下端,其用于获取起重臂段132的下部区域的视野,摄像头c23安装在小车15下端,其用于获取吊钩173及吊钩173正下方的视野。毫米波雷达24安装在起重臂段132下端,其用于获取起重臂段132的下部区域的障碍物分布情况。
[0018]
安全监测组件包括激光测距模块31、平臂变形检测模块32、塔身倾斜检测模块33及风力检测模块34。两个激光测距模块31分别安装在平臂13起重臂段132相对的两侧壁上,两个激光测距模块31的光线射出方向均平行于起重臂段132并向起重臂段132末端延伸,其用于检测起重臂段132的转动路径上是否存在阻挡物。平臂变形检测模块32安装在起重臂段132下端,其用于检测起重臂段132的弯曲变形程度。塔身倾斜检测模块33安装在塔身12上,其用于检测塔身12的弯曲变形程度。风力检测模块34安装在塔身12上,其用于检测风力等级。
[0019]
pc机4分别与摄像头a21、摄像头b22、摄像头c23、毫米波雷达24通信连接,其用于对摄像头a21、摄像头b22、摄像头c23获取的图像及毫米波雷达24获取的雷达数据进行可视化展示。
[0020]
单片机5的信号输入端分别与激光测距模块31、平臂变形检测模块32、塔身倾斜检测模块33、风力检测模块34通信连接,单片机5的信号输出端分别与第一驱动装置14、第二驱动装置16、第三驱动装置172、pc机4通信连接。单片机5与第一驱动装置14、第二驱动装置16、第三驱动装置172通信连接用于控制塔吊的运行状态,单片机5与pc机4通信连接用于将安全监测组件获取的监测数据在pc机4上可视化展示。
[0021]
优选,摄像头a21、摄像头b22、摄像头c23均选用内置4g模组的网络摄像头。
[0022]
优选,pc机4包含快速帧抓取器41和图像边缘计算模块42,pc机4通过快速帧抓取器41分别与摄像头a21、摄像头b22、摄像头c23通信连接,以捕捉摄像头a21、摄像头b22、摄像头c23拍摄的视频图像中的每一帧。图像边缘计算模块42与快速帧抓取器41通信连接,以对快速帧抓取器41提取出的帧画面进行物体轮廓描边处理。
[0023]
优选,快速帧抓取器41的型号为imperx_vce
‑
clex01,图像边缘计算模块42的型号为nvidia jetson tx2。
[0024]
优选,单片机5的型号为stm32f103zet6。
[0025]
一种塔吊控制方法,应用于上述的可视化塔吊控制系统,包括风险处置方法和可视化操控方法。
[0026]
可视化操控方法如下:a、通过摄像头a21和摄像头b22获取被吊物件周边的地面及空中的视野,通过摄像头c23获取吊钩173及吊钩173正下方的视野,通过毫米波雷达获取被吊物件周边的障碍物分布情况雷达图。
[0027]
b、摄像头a21、摄像头b22、摄像头c23、毫米波雷达24的探测范围均为锥形,所述锥形的顶点即为摄像头a21、摄像头b22、摄像头c23、毫米波雷达24的位置所在,所述锥形的中心线与水平面所成夹角即为探测角度;则有,摄像头a21的探测角度大于摄像头b22的探测角度,摄像头c23的探测角度为90
°
,毫米波雷达24的探测角度与摄像头a21的探测角度相同。
[0028]
c、摄像头a21、摄像头b22、摄像头c23拍摄的图像,以及毫米波雷达24获取的雷达图,均在与pc机4连接的一台显示器的不同区域实时显示,或在与pc机4连接的多台显示器上分别显示。
[0029]
风险处置方法如下:a、通过风力检测模块34实时检测塔吊周边的风力等级,检测结果通过单片机5传递至pc机4;当风力大于6级时,由pc机4发出预警,提示操作人员停止塔吊操作;当风力大于8级时,由单片机5直接控制塔吊的第一驱动装置14、第二驱动装置16、第三驱动装置172停止运行,使塔吊停止运行。
[0030]
b、通过塔身倾斜检测模块33实时检测塔身12的倾角,定义倾角为塔身12与竖直平面所成夹角,设为r,塔吊空载(即吊钩173上未吊装物件)的情况下,r为0
°
;当r的范围为
‑
0.2
°
<r<0.2
°
时,塔身12的倾角在安全值范围内;当r≥1
°
或r≤
‑1°
时,由单片机5直接控制塔吊的第一驱动装置14、第二驱动装置16、第三驱动装置172停止运行,使塔吊停止运行;当
‑1°
<r≤
‑
0.2
°
或0.2
°
≤r<1
°
时,pc机4发出预警(在与pc机相连接的显示器上显示报警信息),提示操作人员停止塔吊操作。
[0031]
c、通过平臂变形检测模块32实时检测起重臂段132的弯曲变形程度,平臂变形检测模块32为压力传感器,所述压力传感器安装在起重臂段132中部下端,距离起重臂段132末端距离为起重臂段132全长的1/3,通过单片机5设置警报阈值和停机阈值,警报阈值小于停机阈值;当塔吊空载时,起重臂段132仅在自身重量下产生向下的弯曲变形,当塔吊吊运物件时,起重臂段132在被吊物件及自身重量的共同作用下弯曲变形程度增大,对压力传感器施加的压力也相应增大,压力传感器的检测数值也相应增大;设定压力传感器的检测数值为f,当0<f<a时,起重臂段弯曲变形程度在安全范
围内,当a≤f<b时,pc机发出预警,提醒操作人员停止塔吊操作,当f≥b时,由单片机同时执行以下几项控制:1、控制第一驱动装置14停止运行,使平臂13停止转动;2、控制第二驱动装置16动作,将小车15移动至远离起重臂段132末端的极限位置,以减轻起重臂段132的弯曲变形程度;3、控制第三驱动装置172动作,使吊钩173下放,将被吊物件放回地面上;当塔吊吊运其允许起吊的最大重量的物件时,压力传感器受到的压力为停机阈值;当塔吊吊运其允许起吊的最大重量80%的物件时,压力传感器受到的压力为报警阈值。
[0032]
d、通过激光测距模块31检测起重臂段132的转动路径上是否存在阻挡物,设定激光测距模块31距离起重臂段132末端的固有距离为s,激光测距模块31的测距值为h,当h>s时,表示起重臂段132的转动路径上不存在阻挡物,当h≤s时,表示起重臂段132的转动路径上存在阻挡物;两个激光测距模块31同时启动测距,以同一时间点测距值相对较小的激光测距模块31作为判断基准;当h>s p时,表示起重臂段132在转动过程中不会撞到障碍物;当h≤s p时,表示起重臂段132在转动过程中存在撞上障碍物的风险,则由单片机5控制第一驱动装置14停止运行,使平臂13停止转动;p为安全距离,取值范围为0.1~0.5m。
[0033]
优选,快速帧抓取器41抓取摄像头a21、摄像头b22、摄像头c23拍摄图像中的帧画面后,再通过图像边缘计算模块42对帧画面进行物体轮廓描边处理,最后通过pc机的显示器呈现物体轮廓描边处理后的画面;所述的物体轮廓描边处理以画面中物体的形状或画面中的颜色阈值变化作为约束条件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。