1.本发明涉及垃圾桶技术领域,尤其是涉及一种可智能分类的垃圾桶。
背景技术:
2.垃圾分类是垃圾终端处理设施运转的基础,实施生活垃圾分类,可以有效改善城乡环境,促进资源回收利用。应在生活垃圾科学合理分类的基础上,对应开展生活垃圾分类配套体系建设,根据分类品种建立与垃圾分类相配套的收运体系、建立与再生资源利用相协调的回收体系,完善与垃圾分类相衔接的终端处理设施,以确保分类收运、回收、利用和处理设施相互衔接。只有做好垃圾分类,垃圾回收及处理等配套系统才能更高效地运转。垃圾分类处理关系到资源节约型、环境友好型社会的建设,有利于我国新型城镇化质量和生态文明建设水平的进一步提高。
3.目前的垃圾分类都是采用人工分类的。
技术实现要素:
4.本发明的目的在于提供一种可以对垃圾智能分类的垃圾桶。
5.本发明提供了一种可智能分类的垃圾桶,包括设置有进料孔的外壳和设置在外壳内的若干桶体,所述进料孔上设置有盖体,其特征在于,还包括控制单元、开盖模块和垃圾分类模块;
6.所述开盖模块包括用于检测垃圾靠近盖体附近的检测装置一;以及用于执行打开盖体的开盖装置;
7.所述垃圾分类模块包括包括用于识别垃圾种类的识别装置,以及用于执行分类投放的垃圾分类装置;
8.所述控制单元用于获取检测装置一的检测结果和\或识别装置的识别结果,并根据该检测结果和\或该识别结果控制所述开盖装置和\或垃圾分类装置运行。
9.进一步,所述检测装置一包括人体红外热释感应器和反射型光电探测器;
10.当人体红外热释感应器通过感应温度感应到人体红外反应的同时,反射型光电探测器也通过感应光电遮挡感应到有物体遮挡,此时控制单元判定设备为预投垃圾状态,进而向开盖装置发送开盖指令打开盖体。
11.进一步,所述进料孔为倾斜设置,所述盖体铰接在所述进料孔较高一端,所述进料孔向内延伸有进料通道;所述开盖装置包括连接座、连接板一、连接板二、固定销一、固定销二、电机一、摆杆、连杆一、齿轮连杆和从动抬升杆;
12.所述连接座固定在所述进料通道内壁上,所述连接板一和所述连接板二相互平行且有间隔地固定在所述连接座上,所述固定销一和所述固定销二固定在连接板一和连接板二之间,所述固定销一和所述固定销二相互平行且有间隔,所述电机一的定子固定在所述连接板一上,所述电机一的转轴从所述连接板一穿过并指向所述连接板二,所述电机一的转轴上垂直固定有所述摆杆,所述摆杆远离所述电机一转轴的一端与连杆一第一端铰接;
所述齿轮连杆旋转连接在所述固定销一上,所述齿轮连杆的连杆端与所述连杆一第二段铰接,所述从动抬升杆第一端旋转连接在所述固定销二上,且所述从动抬升杆的第一端上设置有与所述齿轮连杆啮合的齿,所述从动抬升杆的第二段用于顶起所述盖体。
13.进一步,所述识别装置包括摄像头和卷积神经网络;所述摄像头用于拍摄被投入的垃圾,并将图片数据发送到卷积神经网络;卷积神经网络对该图片数据依次进行特征提取、降维处理、非线性映射和特征值整合得到识别结果,并将识别结果发送到控制单元,控制单元依据该识别结果向垃圾分类装置发送分类指令,垃圾分类装置根据该分类指令执行分类。
14.进一步,所述垃圾分类装置包括机架、电机二、分类盘、分类叶轮、开口机构、电机三、转盘和若干所述桶体;
15.所述机架固定在所述外壳内部,所述机架包括相互固定的底部横梁、立柱和顶部横梁;用于电机二、分类盘、分类叶轮、开口机构、电机三、转盘和若干所述桶体的安装固定;
16.所述分类盘固定在所述顶部横梁上表面,所述分类盘呈中间开有轴孔且外延设有边沿的盘状结构,所述电机二定子与所述顶部横梁固定,所述分类叶轮位于所述分类盘内,所述电机二的输出轴从所述分类盘中间的轴孔向上穿出,所述分类盘安装在所述电机二的输出轴上;所述分类盘底面上开有一个与所述分类叶轮相邻叶片间形成的扇形空间适配的扇形孔;所述开口机构用于控制所述扇形孔的封堵和打开;
17.所述电机三的定子与所述底部横梁固定,所述转盘通过轴承旋转安装在所述底部横梁上表面,所述转盘上安装有一圈所述桶体;所述电机三的输出轴带动所述转盘旋转,所述转盘旋转时,各桶体依次经过所述扇形孔下方。
18.进一步,所述开口机构包括一个夹爪和两个挡板,所述夹爪固定在所述安装盘底部,两个所述挡板的组合与所述扇形孔适配;两个所述挡板格自固定在所述夹爪的其中一个爪上。
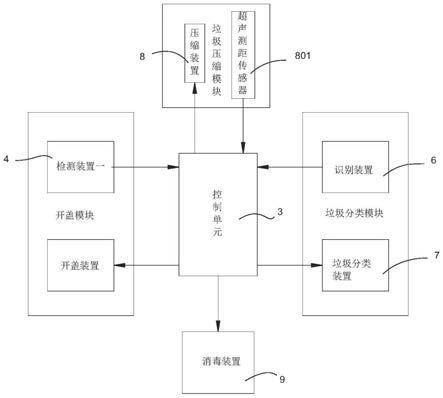
19.进一步,还包括垃圾压缩模块,所述垃圾压缩模块包括超声测距传感器和压缩装置;所述超声测距传感器测得桶体内表面垃圾距离桶沿的高度并发送到控制单元,控制单元计算得到该垃圾距离桶沿的高度小于预设高度时向压缩装置发送压缩指令,压缩装置根据该压缩指令执行压缩工作。
20.进一步,所述压缩装置包括固定板、推板、剪刀撑结构和伸缩缸;所述固定板和推板分别安装在所述剪刀撑结构两端,所述伸缩缸安装在所述剪刀撑结构上用于带动所述剪刀撑结构的伸缩;所述固定板固定在所述顶部横梁的下表面,所述推板位于所述固定板的下方;所述转盘旋转时,各桶体依次经过所述推板下方。
21.进一步,还包括杀菌消毒装置,所述杀菌消毒装置包括消毒药箱和与所述消毒药箱连接的电动喷头,所述电动喷头位于所述外壳内的顶部;所述控制单元定期向所述杀菌消毒装置发送消毒指令,所述杀菌消毒装置收到该消毒指令后启动电动喷头。
22.进一步,所述外壳顶部外表面设置有光伏板及其储能装置,用于为所述可智能分类的垃圾桶供电;所述外壳顶部外表面设置有显示屏。
23.本发明的工作流程是:
24.s1:自动分类垃圾桶进行装置初始化,光伏板持续进行光能转换,检测装置一和超声测距传感器保持敞开状态,开口机构关闭;
25.s2:控制单元判定设备为预投垃圾状态时,开盖装置打开并延时3
‑
10秒然后关闭,垃圾被投放到进料孔并沿着进料通道到达分类盘上;
26.s3:识别装置得到识别结果,电机三转动将与该识别装置相匹配的桶体转动到开口机构下方,开口机构打开,电机二带动分类叶轮转动,使得垃圾落入该桶体;
27.s4:定期启动杀菌消毒装置向分类盘喷洒消毒药物;超声测距传感器持续测量桶体内部垃圾上表面距离桶沿的高度,如发现垃圾上表面距离桶沿的高度小于预设高度时,压缩装置启动将桶体内部压实;如压实过后依旧高于预设高度,则发出报警信号。
28.本发明的有益效果是:可以自动开关盖,自动分类,定期消毒;整体结构简答合理,使用方便。
附图说明
29.图1为本发明的控制示意图。
30.图2为本发明的结构示意图。
31.图3为图2的外观图。
32.图4为本发明中检测装置一的检测流程图。
33.图5为本发明中开盖装置的结构示意图。
34.图6为本发明中识别装置的识别流程图。
35.图7为本发明中垃圾分类装置的整体结构示意图。
36.图8为图7的剖视图。
37.图9为本发明中垃圾分类装置上部分的结构示意图。
38.图10为本发明中开口机构及其与分类盘连接结构示意图。
39.图11为本发明中压缩装置的结构示意图。
40.图12为本发明的工作流程图。
具体实施方式
41.以下结合实施方式对本发明作进一步的说明。
42.如图1至图12所示,本实施例公开了一种可智能分类的垃圾桶,包括设置有进料孔的外壳1和设置在外壳1内的若干桶体2,所述进料孔上设置有盖体11,其特征在于,还包括控制单元3、开盖模块和垃圾分类模块;所述开盖模块包括用于检测垃圾靠近盖体11附近的检测装置一4;以及用于执行打开盖体11的开盖装置5;所述垃圾分类模块包括包括用于识别垃圾种类的识别装置6,以及用于执行分类投放的垃圾分类装置7;所述控制单元3用于获取检测装置一4的检测结果和\或识别装置6的识别结果,并根据该检测结果和\或该识别结果控制所述开盖装置5和\或垃圾分类装置7运行。
43.所述检测装置一4包括人体红外热释感应器41和反射型光电探测器42;当人体红外热释感应器41通过感应温度感应到人体红外反应的同时,反射型光电探测器42也通过感应光电遮挡感应到有物体遮挡,此时控制单元3判定设备为预投垃圾状态,进而向开盖装置5发送开盖指令打开盖体11。
44.所述进料孔为倾斜设置,所述盖体11铰接在所述进料孔较高一端,所述进料孔向内延伸有进料通道12;所述开盖装置5包括连接座51、连接板一52、连接板二53、固定销一
54、固定销二55、电机一56、摆杆57、连杆一58、齿轮连杆59和从动抬升杆510;所述连接座51固定在所述进料通道12内壁上,所述连接板一52和所述连接板二53相互平行且有间隔地固定在所述连接座51上,所述固定销一54和所述固定销二55固定在连接板一52和连接板二53之间,所述固定销一54和所述固定销二55相互平行且有间隔,所述电机一56的定子固定在所述连接板一52上,所述电机一56的转轴从所述连接板一52穿过并指向所述连接板二53,所述电机一56的转轴上垂直固定有所述摆杆57,所述摆杆57远离所述电机一56转轴的一端与连杆一58第一端铰接;所述齿轮连杆59旋转连接在所述固定销一54上,所述齿轮连杆59的连杆端与所述连杆一58第二段铰接,所述从动抬升杆510第一端旋转连接在所述固定销二55上,且所述从动抬升杆510的第一端上设置有与所述齿轮连杆59啮合的齿,所述从动抬升杆510的第二段用于顶起所述盖体11。
45.所述识别装置6包括摄像头和卷积神经网络;所述摄像头用于拍摄被投入的垃圾,并将图片数据发送到卷积神经网络;卷积神经网络对该图片数据得到识别结果,具体为:d1信号输入;d2特征提取;d3降维处理;d4非线性映射;d5特征值整合;d6输出识别结果。将识别结果发送到控制单元3,控制单元3依据该识别结果向垃圾分类装置7发送分类指令,垃圾分类装置7根据该分类指令执行分类。
46.所述垃圾分类装置7包括机架71、电机二72、分类盘73、分类叶轮74、开口机构75、电机三76、转盘77和若干所述桶体2;所述机架71固定在所述外壳1内部,所述机架71包括相互固定的底部横梁711、立柱712和顶部横梁713;用于电机二72、分类盘73、分类叶轮74、开口机构75、电机三76、转盘77和若干所述桶体2的安装固定;所述分类盘73固定在所述顶部横梁713上表面,所述分类盘73呈中间开有轴孔且外延设有边沿的盘状结构,所述电机二72定子与所述顶部横梁713固定,所述分类叶轮74位于所述分类盘73内,所述电机二72的输出轴从所述分类盘73中间的轴孔向上穿出,所述分类盘73安装在所述电机二72的输出轴上;所述分类盘73底面上开有一个与所述分类叶轮74相邻叶片间形成的扇形空间适配的扇形孔;所述开口机构75用于控制所述扇形孔的封堵和打开;所述电机三76的定子与所述底部横梁711固定,所述转盘77通过轴承旋转安装在所述底部横梁711上表面,所述转盘77上安装有一圈所述桶体2;所述电机三76的输出轴带动所述转盘77旋转,所述转盘77旋转时,各桶体2依次经过所述扇形孔下方。
47.所述开口机构75包括一个夹爪751和两个挡板752,所述夹爪751固定在所述安装盘底部,两个所述挡板752的组合与所述扇形孔适配;两个所述挡板752格自固定在所述夹爪751的其中一个爪上。
48.还包括垃圾压缩模块,所述垃圾压缩模块包括超声测距传感器801和压缩装置8;所述超声测距传感器801测得桶体2内表面垃圾距离桶沿的高度并发送到控制单元3,控制单元3计算得到该垃圾距离桶沿的高度小于预设高度时向压缩装置8发送压缩指令,压缩装置8根据该压缩指令执行压缩工作。
49.所述压缩装置8包括固定板81、推板82、剪刀撑结构83和伸缩缸84;所述固定板81和推板82分别安装在所述剪刀撑结构83两端,所述伸缩缸84安装在所述剪刀撑结构83上用于带动所述剪刀撑结构83的伸缩;所述固定板81固定在所述顶部横梁713的下表面,所述推板82位于所述固定板81的下方;所述转盘77旋转时,各桶体2依次经过所述推板82下方。
50.还包括杀菌消毒装置9,所述杀菌消毒装置9包括消毒药箱91和与所述消毒药箱91
连接的电动喷头92,所述电动喷头92位于所述外壳1内的顶部;所述控制单元3定期向所述杀菌消毒装置9发送消毒指令,所述杀菌消毒装置9收到该消毒指令后启动电动喷头92。
51.所述外壳1顶部外表面设置有光伏板13及其储能装置,用于为所述可智能分类的垃圾桶供电;所述外壳1顶部外表面设置有显示屏14。
52.本发明的工作流程是:
53.s1:自动分类垃圾桶进行装置初始化,光伏板13持续进行光能转换,检测装置一4和超声测距传感器801保持敞开状态,开口机构75关闭;
54.s2:控制单元3判定设备为预投垃圾状态时,开盖装置5打开并延时3
‑
10秒然后关闭,垃圾被投放到进料孔并沿着进料通道12到达分类盘73上;
55.s3:识别装置6得到识别结果,电机三76转动将与该识别装置6相匹配的桶体2转动到开口机构75下方,开口机构75打开,电机二72带动分类叶轮74转动,使得垃圾落入该桶体2;
56.s4:定期启动杀菌消毒装置9向分类盘73喷洒消毒药物;超声测距传感器801持续测量桶体2内部垃圾上表面距离桶沿的高度,如发现垃圾上表面距离桶沿的高度小于预设高度时,压缩装置8启动将桶体2内部压实;如压实过后依旧高于预设高度,则发出报警信号。
57.本发明的有益效果是:可以自动开关盖,自动分类,定期消毒;整体结构简答合理,使用方便。
58.以上仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。