1.本发明涉及开槽机领域,特别涉及一种四面刨开槽机压脚避障方法。
背景技术:
2.开槽机是一种常用的数控加工设备,而传统的卧式开槽机一般只能在一个方向进行往复开槽动作。比如,如果工件需要在x方向和y方向两个成90
°
的方向分别开槽,则正常操作流程是,在y方向开完槽之后,需要操作人员先将多个液压压脚打开,然后将板材手动旋转90
°
之后再放置在床身上,对好原点位置,将液压压脚压下继续进行开槽动作,这样则会耗费大量人力、物力和时间,降低加工效率。
3.目前也出现有现四面刨设备,即在开槽刀头中增加旋转刀架,使得刀头可以实现90
°
旋转。但在实际加工生产中,经常会遇到槽坑位置与液压压脚相互干涉情况,因此通过电机驱动实现压脚左右移动,以避开干涉槽坑位置,而通过一台电机驱动实现全部压脚左右移动,往往会显得不够灵活,难以达到预期的目标。
技术实现要素:
4.为解决上述问题,本发明提供了一种四面刨开槽机压脚避障方法。
5.根据本发明的一个方面,提供了一种四面刨开槽机压脚避障方法,包括以下步骤:
6.1)预设各压脚的前侧与后侧相对床身x方向坐标;
7.2)获取各槽坑位置的x方向坐标;
8.3)依次判断各槽坑位置的x方向坐标是否分别在与其相邻的两个压脚的相对侧的x方向坐标区间内;
9.4)根据判断结果移动压脚进行避障;
10.5)得到新的坐标区间值,重复步骤3)至步骤4)直到完成所有避障。
11.本发明中的四面刨开槽机压脚避障方法能够提升移动压脚灵活性,避开需要开槽的槽坑位置,在满足所有槽坑位置需求的基础上,尽可能少的移动液压压脚,从而节省了人力、物力和时间,提高了开槽加工的效率。
12.在一些实施方式中,在步骤1)中,所预设的各x方向坐标包括床身两端x方向运动极限坐标。由此,两端的极限坐标分别为位于两侧的开槽区间的末端的坐标。
13.在一些实施方式中,在步骤3)中,如果槽坑位置的x方向坐标超过床身两端x方向运动极限坐标范围,则报错并进行检查。由此,理论上来说,槽坑位置的x方向坐标不会超过床身两端x方向运动极限坐标范围,否则就是程序本身有问题。
14.在一些实施方式中,在步骤4)中,如果各槽坑位置的x方向坐标分别在与其相邻的两个压脚的相对侧的x方向坐标区间内,则各压脚无需移动即可实现全部槽坑开槽。由此,设置槽坑开槽较为顺利的情况,其中不需要再移动避障。
15.在一些实施方式中,在步骤4)中,如果某些槽坑位置的x方向坐标不在与其相邻的两个压脚的相对侧的x方向坐标区间内,则其与某些压脚出现干涉现象,则移动压脚进行避
障。由此,描述了判断需要进行避障的情况。
16.在一些实施方式中,移动压脚移动避障的距离区间从负向移动区间和正向移动区间中进行选择。由此,描述了移动液压压脚移动避障的距离区间种类。
17.在一些实施方式中,负向移动区间为各负向移动避障区间的交集,而负向移动避障区间为这些槽坑位置分别与这些压脚的前侧以及前一压脚的后侧的两个坐标的距离所构成的区间。由此,描述了负向移动区间的具体定义。
18.在一些实施方式中,正向移动区间为各正向移动避障区间的交集,而正向移动避障区间为这些槽坑位置分别与这些压脚的后侧以及后一压脚的前侧的两个坐标的距离所构成的区间。由此,描述了正向移动区间的具体定义。
19.在一些实施方式中,从负向移动区间和正向移动区间中取能够避开更多槽数的距离区间作为移动方向。由此,描述了选取避障移动方向的方法。
附图说明
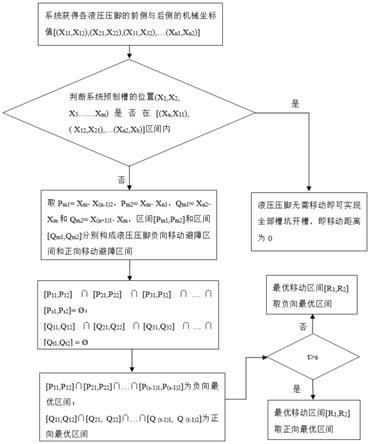
20.图1为本发明一实施方式的一种四面刨开槽机压脚避障方法的流程图。
具体实施方式
21.下面结合附图对本发明作进一步详细的说明。
22.图1示意性地显示了根据本发明的一种实施方式的一种四面刨开槽机压脚避障方法的流程。如图1所示,该方法用于使开槽机的液压压脚避开需要开槽的槽坑位置,从而保证加工的效率。其中,设置机床床身的延伸方向为x方向,而在该方法中仅需要考虑x方向的坐标。
23.该方法的具体操作运行步骤如下所述。
24.第一步,预设各压脚的前侧与后侧相对床身x方向坐标,即在设置了床身x方向的情况下,选取各压脚的前侧与后侧的坐标。比如,设第一个压脚的前侧坐标为x
11
,后侧坐标为x
12
,第二个压脚的前侧坐标为x
21
,后侧坐标为x
22
,依次类推,则第n个压脚的前侧坐标为x
n1
,后侧坐标为x
n2
。则各压脚的前侧与后侧所构成的障碍区间为[(x
11
,x
12
),(x
21
,x
22
)
……
(x
n1
,x
n2
)]。
[0025]
其中,所预设的各x方向坐标包括床身两端x方向运动极限坐标,比如,设前侧的x方向运动极限坐标的为x
a
,后侧的x方向运动极限坐标的为x
b
。
[0026]
设每相邻的两个压脚的间隔构成的区间为开槽区间,则可知各开槽区间的坐标为[(x
a
,x
11
),(x
12
,x
21
)
……
(x
n2
,x
b
)]。
[0027]
第二步,获取各槽坑位置的x方向坐标。其中,设各槽坑位置的x方向坐标为x1,x2……
x
m
。
[0028]
第三步,通过程序依次判断各槽坑位置的x方向坐标即x1、x2……
x
m
是否分别在与其相邻的两个压脚的相对侧的x方向坐标区间,也就是各开槽区间[(x
a
,x
11
),(x
12
,x
21
)
……
(x
n2
,x
b
)]的内部。具体来说,就是依次判断x
n2
<x
m
<x
(n 1)1
(m=1,2,3
……
;n=1,2,3
……
)。
[0029]
此外,如果槽坑位置的x方向坐标超过床身两端x方向运动极限坐标范围,即出现x
m
<x
a
或者x
m
>x
b
的情况,则表明程序本身存在问题,则会及时报错,停止加工并进行程序检查。
[0030]
第四步,根据判断情况移动液压压脚进行避障。具体来说,就是根据判断结果的不同,选择是否需要进行避障以及向哪个方向进行避障。主要包括一下几种情况。
[0031]
如果各槽坑位置的x方向坐标分别在与其相邻的两个压脚的相对侧的x方向坐标区间内,即可以实现x
n2
<x
m
<x
(n 1)1
(m=1,2,3
……
;n=1,2,3
……
),则所有要开槽的槽坑位置均在可开槽区间内,各压脚无需移动即可实现全部槽坑开槽,即移动距离为零。
[0032]
而如果某些槽坑位置的x方向坐标不在与其相邻的两个压脚的相对侧的x方向坐标区间内,即出现x
n1
<x
m
<x
n2
,则说明这些槽坑与某些压脚出现干涉现象,此时则需要移动压脚进行避障,而具体移动距离区间和方向如下所述。
[0033]
在进行避障时,首先需要计算移动压脚移动避障的距离区间。以某槽坑x
m
为例,取该槽坑位置x
m
所出现干涉压脚的前一压脚的后侧坐标x
(n
‑
1)2
、该压脚本身的前侧坐标x
n1
、后侧坐标x
n2
和后一压脚的前侧坐标x
(n 1)1
。设槽坑位置x
m
与四个坐标的距离分别为p
m1
、p
m2
、q
m1
和q
m2
,即其具体计算方法为:p
m1
=x
m
‑
x
(n
‑
1)2
,p
m2
=x
m
‑
x
n1
,q
m1
=x
n2
‑
x
m
,q
m2
=x
(n 1)1
‑
x
m
。
[0034]
由此可得两个避障区间[p
m1
,p
m2
]以及[q
m1
,q
m2
],其中,设[p
m1
,p
m2
]为该压脚的负向移动避障区间,而[q
m1
,q
m2
]为该压脚的正向移动避障区间。则第n个压脚在这两个区间范围内移动,则第m道槽就可以完全避开。
[0035]
按照上述方法可以排查出所有与压脚有干涉的各槽坑组成集合(x1,x2……
x
m
),并分别计算出各槽坑的负向移动避障区间[p
11
,p
12
]、[p
21
,p
22
]
……
[p
m1
,p
m2
]以及正向移动避障区间[q
11
,q
12
]、[q
21
,q
22
]
……
[q
m1
,q
m2
]。
[0036]
而在选择具体避障方向时,对于负向移动避障区间[p
m1
,p
m2
]而言,将各负向移动避障区间相交直到第s个交集为空集,即为空集,即则[p
11
,p
12
]∩[p
21
,p
22
]∩
……
∩[p
(s
‑
1)1
,p
(s
‑
1)2
]即为压脚可以避开槽数最多的负向移动区间,即负向最优区间。
[0037]
同理,对于正向移动避障区间[q
m1
,q
m2
]来说,将各正向移动避障区间相交直到第t个交集为空集,即个交集为空集,即则[q
11
,q
12
]∩[q
21
,q
22
]∩
……
∩[q
(t
‑
1)1
,q
(t
‑
1)2
]即为压脚可以避开槽数最多的正向移动区间,即正向最优区间。
[0038]
其中,当s>t时,则表示负向运动能够避开更多的槽数,因此选择负向移动,而最优移动区间[r1,r2]为负向最优区间;反之,当s<t时,则表示正向运动能够避开更多的槽数,因此选择正向移动,而最优移动区间[r1,r2]为正向最优区间,由此则可以进行一次避障。
[0039]
第五步,在得到一次最优移动区间[r1,r2],并进行一次移动压脚避障后,则可以得到一组新的障碍区间坐标值障碍区间[(x
11’,x
12’),(x
21’,x
22’)
……
(x
n1’,x
n2’)],而此时还剩余一些槽坑未开,具体数量为m
‑
t(当t>s时)或者m
‑
s(当t<s时),则需要继续进行下一次移动压脚避障。则可以再次按照第三步和第四步中的方法得到下一次避障的最优移动区间并进行移动避障,直到完成所有避障。由此,则能够以最少的移动次数和最高的移动效率使得所有要开槽的槽坑位置均移动到可开槽区间内,从而实现全部槽坑开槽。
[0040]
以上所述的仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。