1.本发明属于物料搬运系统领域,更确切的说涉及半导体制造技术,尤其涉及一种空中搬运装置及搬运系统。
背景技术:
2.随着集成电路在日常生活中的普遍应用,半导体在产品中开始扮演角色日益重要,其需求相对也大幅提升,因此促进了全球半导体市场的蓬勃发展。为了满足集成电路的大量需求,大部分的半导体制造企业都以提高产能及合格率为优先目标。在半导体制造企业中,晶片通常是采用批量的搬运方式,然而通过人力搬运不仅效率低,也容易发生危险、且搬运过程中存在芯片污染、芯片碰撞破碎等不确定因素。为解决人工搬运所带来的风险及不确定因素,自动物料搬运系统(amhs:automatic material handling system)应运而生,并且已经广泛应用在半导体制造行业中。
3.空中运输系统(oht:overhead
‑
hosit
‑
transportation)是一种搬运物料的系统(foup:front open unified pod),因其具有更大的空间自由度而经常被用在自动物料搬运系统中。目前,晶片厂(fabrication,fab)之间的晶片传送,一般以oht小车为载体来完成各个工序之间的衔接。以oht小车为载体进行搬运需要进行在设备的指定位置进行精确定位且需要在轨道上进行行驶且换向转弯,但现有技术中的oht小车并不能实现上述功能。
4.基于以上本技术提供了解决以上技术问题的技术方案。
技术实现要素:
5.本发明的主要目的是克服现有技术缺陷,提供一种空中搬运装置及搬运系统,解决了现有空中运输系统的小车无法实现转向的功能,提升了空中搬运装置的转向能力。
6.本发明提供的技术方案如下:一种空中搬运装置,包括车体,车体设置在行进导轨上并能够沿行进导轨的延伸方向行进,空中搬运装置还包括:转向导轨,架设在行进导轨的转向区域上方;转向引导组件,设置在车体的上端,转向引导组件能够相对于车体滑动,且转向引导组件的滑动方向与车体的行进方向之间具有夹角,夹角为劣角,转向引导组件能够与转向导轨配合抵接以对车体进行换向引导。
7.进一步地,转向引导组件包括:直线导轨,固定设置在车体的上端,直线导轨的延伸方向与车体的行进方向垂直;滑块,设置在直线导轨上,滑块能够沿直线导轨的延伸方向相对于车体滑动;转弯上导向轮组,设置在滑块的上端面,转弯上导向轮组能够与转向导轨配合抵接;转弯导向驱动组件,设置在车体的上端,转弯导向驱动组件能够驱动滑块沿直线导轨滑动。
8.进一步地,转弯导向驱动组件包括:旋转电磁铁,固定设置在车体的上端;转臂,一端与旋转电磁铁的旋转轴固定连接,转臂的另一端与滑块铰接,旋转电磁铁驱动转臂转动从而带动滑块滑动。
9.进一步地,转向引导组件还包括:到位限位块,对称设置在直线导轨的两端并限制
滑块的滑动位置;位置检测组件,设置在车体上端并用于检测转臂的位置和/或滑块的位置,并通过位置检测组件传输对应的位置检测信号。
10.进一步地,转弯导向驱动组件还包括转弯下导向轮组,设置在车体的下端,转弯下导向轮组能够与行进导轨的内侧壁抵接配合。
11.进一步地,车体包括结构相同的第一车体和第二车体,第一车体的尾端与第二车体的首端连接,且第一车体的上端和第二车体的上端均设置有转向引导组件。
12.进一步地,第一车体包括:本体;行走轮组,对称设置在本体的两侧并能够与行进导轨的上端面抵接;平行轴减速机,设置在本体上,平行轴减速机的输出轴与行走轮组连接;伺服电机,设置在本体上并与平行轴减速机的输入轴连接。
13.进一步地,空中搬运装置还包括防碰撞组件,防碰撞组件设置在第一车体的首端与第二车体的尾端。
14.进一步地,防碰撞组件包括防撞块和防撞检测单元,防撞块设置在第一车体的首端,防撞检测单元设置在第二车体的尾端;或者,防撞块设置在第二车体的尾端,防撞检测单元设置在第一车体的首端;其中,防撞检测单元包括:防撞筒体,一端与对应的第一车体或者第二车体固定连接,防撞筒体的另一端为开口端;弹簧,设置在防撞筒体中;压缩检测块,与开口端卡接设置,压缩检测块的一端与弹簧抵接,压缩检测块的另一端置于开口端外侧并能够与相邻车体上设置的防撞块抵接;撞击检测传感器,设置在防撞筒体内,撞击检测传感器能够检测压缩检测块的位移并对应发送撞击反馈信号。
15.进一步地,行进导轨的下表面设置有多个间隔设置的位置条码,空中搬运装置还包括条码读取反馈组件,设置在车体的下端,条码读取反馈组件能够读取位置条码的位置信息并发送对应的位置信号。
16.进一步地,空中搬运装置还包括无线取电装置,设置在车体上并与车体和转向引导组件电连接。
17.本发明还提供了一种搬运系统,包括空中搬运装置、运输仓和搬运组件,空中搬运装置为上述的空中搬运装置,运输仓悬吊在车体的下方,搬运组件设置在空中搬运装置的一侧,搬运组件能够将待搬运的半导体设备搬运至运输仓内。
18.通过本发明提供的空中搬运装置,能够带来以下至少一种有益效果:将转向导轨设置在行进导轨的转向区域上方,当车体需要进行转向时,转向引导组件可以相对于车体进行滑动,从而改变转向引导组件相对于车体的位置,即改变转向引导组件与转向导轨的抵接位置,从而实现车体的换向引导,使车体能够在行进过程中进行转向。
附图说明
19.下面将以明确易懂的方式,结合附图说明优选实施方式,对上述特性、技术特征、优点及其实现方式予以进一步说明。
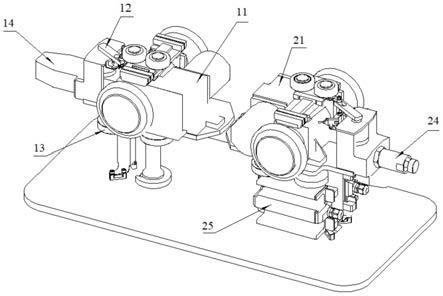
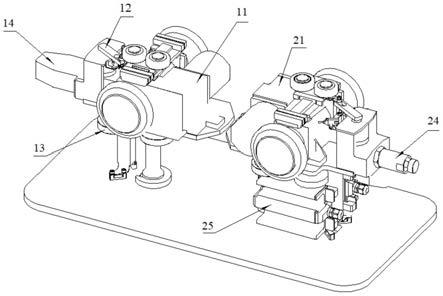
20.图1为本发明实施例的整体装配结构示意图;
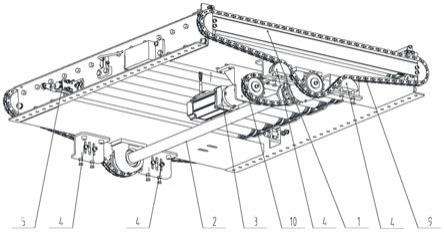
21.图2为本发明实施例中车体的结构示意图;
22.图3为本发明实施例中转向引导组件的结构示意图;
23.图4为本发明实施例中转弯下导向轮组的装配俯视图;
24.图5为本发明实施例中转弯下导向轮组的装配侧视图;
25.图6为本发明实施例中防碰撞组件的装配结构示意图;
26.图7为本发明实施例中转向导轨与车体的装配结构示意图;
27.图8为本发明实施例中位置条码和条码读取反馈组件的装配结构示意图。
28.图中附图标记:11、第一车体;111、伺服电机;112、平行轴减速机;113、行走轮组;12、转向引导组件;121、旋转电磁铁;122、转臂;123、直线导轨;124、到位感应片;125、槽型检测传感器;126、到位限位块;127、转弯上导向轮组;128、滑块;13、转弯下导向轮组;14、防撞块;16、位置条码;17、条码读取反馈组件;21、第二车体;24、防撞检测单元;25、无线取电装置;31、直行引导轨;32、转向引导轨。
具体实施方式
29.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
30.如图1至图8所示,本发明实施例提供了一种空中搬运装置,包括车体,车体设置在行进导轨上并能够沿行进导轨的延伸方向行进,空中搬运装置还包括转向导轨和转向引导组件12。转向导轨架设在行进导轨的转向区域上方;转向引导组件12设置在车体的上端,转向引导组件12能够相对于车体滑动,且转向引导组件12的滑动方向与车体的行进方向之间具有夹角,该夹角为劣角,转向引导组件12能够与转向导轨配合抵接以对车体进行换向引导。
31.将转向导轨设置在行进导轨的转向区域上方,当车体需要进行转向时,转向引导组件12可以相对于车体进行滑动,从而改变转向引导组件12相对于车体的位置,即改变转向引导组件12与转向导轨的抵接位置,从而实现车体的换向引导,使车体能够在行进过程中进行转向。
32.本实施例中转向导轨为阶段式分布,即仅在行进导轨的转向区域上方进行设置,在行进导轨的其他直行区域不进行设置。上述行进轨道在转向区域处设置有分叉口,该分叉口具有保持直行的轨道段和进行转向的轨道段。上述转向导轨的结构与分叉口处行进轨道的结构相同,包括直行引导轨31和转向引导轨32,并且上述直行引导轨31与保持直行的轨道段位置对应,上述转向引导轨32与进行转向的轨道段的轨道段位置对应。
33.当需要进行转向操作时,上述转向引导组件12根据控制组件的相应指令在达到转向导轨前改变相对于车体的位置,从而使转向引导组件12由原先与直行引导轨31抵接变为使转向引导组件12与转向引导轨32抵接,进而能够引导车体沿转向引导轨32的延伸方向移动,即使车体进入到进行转向的轨道段,以完成转向操作。
34.当然,本实施例中的转向导轨并不限于上述结构,还可以具有更多方向的转向引导轨32,从而实现多方向的转向需求。并且上述多方向的转向引导轨32之间以及与直行引导轨31之间并不会产生干涉。
35.参照图3所示,在本技术的一个实施例中,转向引导组件12包括直线导轨123、滑块128、转弯上导向轮组127和转弯导向驱动组件。直线导轨123固定设置在车体的上端,直线导轨123的延伸方向与车体的行进方向垂直;滑块128设置在直线导轨123上,滑块128能够
沿直线导轨123的延伸方向相对于车体滑动;转弯上导向轮组127设置在滑块128的上端面,转弯上导向轮组127能够与转向导轨配合抵接;转弯导向驱动组件设置在车体的上端,转弯导向驱动组件能够驱动滑块128沿直线导轨123滑动。
36.其中,上述转弯上导向轮组127至少包括两个对称设置的上导向轮,且上述上导向轮的分布方向应与车体在导轨上的行进方向平行,以确保本实施例能够更加平稳的转向。
37.本实施例中的转弯导向驱动组件其作用是对滑块128进行驱动,实现滑块128本身相对于车体的滑动,由于直线导轨123垂直于车体行进方向设置,因此滑块128能够以最短的行进距离移动至另一侧的设定位置处,实现换向导向。并且在滑块128移动后,通过上述转弯上导向轮组127的设置可以使本实施例中车体平滑接入到转向导轨中,不会对转向导轨本身或者车体本身造成冲击。同时,转弯上导向轮组127还能减小转弯导向驱动组件与转向导轨之间的摩擦力,提升装置整体的使用寿命。
38.需要说明的是,上述的劣角的范围值为0
°
至180
°
之间,且不包含两边端点值。即说明直线导轨123的延伸方向与行进方向之间的夹角范围在0
°
至180
°
之间,且不包含两边端点值。
39.在本技术的一种未图示的实施例中,上述直线导轨123的延伸方向与行进方向之间的夹角可以为30
°
、60
°
或者135
°
,在滑块128进行移动时,该未图示的实施例中滑块128的移动位移略长于上述直线导轨123的延伸方向与行进方向垂直实施例中滑块128的移动位移。而在该未图示的实施例中滑块128也能完成相对于车体的滑动操作,实现换向导向的目的。
40.在本发明实施例中,转弯导向驱动组件包括旋转电磁铁121和转臂122。旋转电磁铁121固定设置在车体的上端;转臂122的一端与旋转电磁铁121的旋转轴固定连接,转臂122的另一端与滑块128铰接,旋转电磁铁121能够驱动转臂122转动从而带动滑块128滑动。
41.旋转电磁铁121控制系统与其他驱动组件相比相对简单,且旋转电磁铁121的启停通过单纯的电流通断即可实现,旋转电磁铁121的转动速度也可以通过线圈匝数以及电流流量大小控制,相比于其他类别的驱动组件,本技术采用旋转电磁铁121可以简化对应的控制组件,使本技术整体装置可以实现小型化设计需求。
42.当然,上述旋转电磁铁121可以对应替换为旋转伺服电机等转动驱动部件,凡是可以实现带动转臂122进行转动的驱动部件均应该在本技术的保护范围内。
43.本技术并不限于上述实施例,例如在一种未图示的实施例中,转弯导向驱动组件可以包括滑块和伺服驱动电机,上述滑块上设置有驱动滑轮,该驱动滑轮与对应的直线导轨抵接。上述伺服驱动电机设置在滑块内并能驱动上述驱动滑轮转动,从而实现滑块相对于车体的滑动。
44.在另一种未图示的实施例中,上述转向引导组件12包括转动丝杠、螺母和驱动电机。上述转动丝杠的延伸方向与车体的行进方向垂直,螺母设置在转动丝杠上,并且在螺母上方设置有足够高度的转弯上导向轮组127,驱动电机设置在车体上并与转动丝杠连接。在工作时,通过驱动电机驱动转动丝杠转动从而带动螺母相对于车体滑动。在滑动过程中螺母会带动与其固定连接的转弯上导向轮组127实现相对于车体的滑动,进而达到换向引导的目的。
45.本实施例中,转弯上导向轮组127与转动丝杠之间的距离足够大,以避免在转弯上
导向轮组127与转向导轨抵接时,转向导轨与转动丝杠发生干涉。
46.在本技术的第三种未图示的实施例中,上述滑块128可以由具有固定磁极的永磁体制成或者在上述滑块128的两侧设置有对应的固定磁极的磁片。相应的,在直线导轨123的两端设置有可变磁极的电磁铁,当需要滑块128进行滑动时,通过对可变磁极的电磁铁进行通电,实现滑块128朝向一侧方向滑动。当需要滑块128朝向另一侧滑动时,改变可变磁极的电磁铁的磁极方向,可以实现滑块128的换向滑动目的。
47.当然,本技术还应包括更多实施例,凡是可以实现滑块128相对于车体往返滑动的技术方案均应该在本技术的保护范围内,此处申请人不在对其进行一一列举。
48.如图3所示,本发明实施例中的转向引导组件12还包括到位限位块126和位置检测组件。到位限位块126对称设置在直线导轨123的两端并能够限制滑块128的滑动位置;位置检测组件设置在车体上端并用于检测转臂122的位置和/或滑块128的位置,并且位置检测组件能够发送对应的位置检测信号。
49.上述到位限位块126设置的目的是对滑块128的滑动位置进行限制,避免滑块128工作时脱离直线导轨123,从而降低装置的运行风险。在本实施例中可以在到位限位块126的内侧设置有缓冲件,例如橡胶垫等柔性材料,当滑块128滑动至设定位置时可以通过缓冲件进行缓冲,以避免对滑块128以及到位限位块126造成损坏。
50.位置检测组件的设置目的对转臂122的位置和/或滑块128的位置进行检测,以判断转臂122和/或滑块128是否按照设定需求移动到位,从而通过上述位置检测信号的反馈信息可以对转臂122和/或滑块128的误差进行校正,使本技术能够达到精确转向的目的。
51.如图3所示,本实施例中位置检测组件包括槽型检测传感器125和到位感应片124,槽型检测传感器125和到位感应片124均设置在旋转电磁铁121的支架上端。到位感应片124分布在转臂122的转动范围内并位于设定角度处。槽型检测传感器125设置在转臂122的一侧并能够检测与转臂122之间的距离。
52.工作时,通过转臂122转动到设定位置时,会触发该位置的到位感应片124使其发送对应的位置信号至控制组件,同时槽型检测传感器125会对转臂的转动距离进行检测,发送至控制组件与设定位置进行对比,从而获知该转臂122的具体转动角度,控制组件可以对转臂122的位置进行校正,实现精确转动的目的。
53.当对其他未图示实施例中方案进行位置检测时,上述位置检测组件的具体选用以及分布位置设置可以根据不同的需求进行调整。
54.如图4和图5所示,转弯导向驱动组件还包括转弯下导向轮组13,设置在车体的下端,转弯下导向轮组13能够与行进导轨的内侧壁抵接配合。设置转弯下导向轮组13能够在运动行驶中靠紧两边的行进导轨内侧壁,确保了车体行驶和转向过程中的平稳性。
55.本实施例中转弯下导向轮组13包括至少四个转弯下导向轮,上述四个转弯下导向轮分别设置在车体的四角,以实现对车体的转弯支撑。当然,上述转弯下导向轮的数量还可以为大于四个的偶数,即沿车体与行进导轨平行的两侧边镜像对称分布,以使车体转向时能够保持平稳。
56.更优选地,本实施例中可以在行进导轨的内侧壁设置有定位卡接凹槽,即使行进导轨截面呈“工”形结构,上述转弯下导向轮对应卡接在定位卡接凹槽内可以防止转向力过大时车体脱轨。
57.本发明实施例还提供了一种未图示的实施例,在该实施例中每个转弯下导向轮均通过一根具有一定弹性的连接杆与车体独立连接,该连接杆在常态下能够为转弯下导向轮施加朝向行进导轨内侧壁的压力,使转弯下导向轮能够在该压力下紧贴于行进导轨的内侧壁上,以保证车体转弯的稳定性。
58.车体包括结构相同的第一车体11和第二车体21,第一车体11的尾端与第二车体21的首端连接,且第一车体11的上端和第二车体21的上端均设置有转向引导组件12。
59.在结构相同的第一车体11和第二车体21上均设置有转向引导组件12,可以对第一车体11和第二车体21均进行转向引导,避免出现安装有转向引导组件12的车体完成转向而未安装转向引导组件12的车体继续保持直行的事故发生,从而保证了本实施例运行时的安全性。
60.本实施例中第一车体11和第二车体21的基础结构相同,但根据不同需要第一车体11和第二车体21上所安装的各配件允许不同,从而提升本实施例的适用范围。
61.参照图1和图2所示,由于第一车体11和第二车体21的基础结构相同,此处申请人仅对第一车体11进行说明。本发明实施例的第一车体11包括本体、行走轮组113、平行轴减速机112和伺服电机111。行走轮组113对称设置在本体的两侧并能够与行进导轨的上端面抵接;平行轴减速机112设置在本体上,平行轴减速机112的输出轴与行走轮组113连接;伺服电机111设置在本体上并与平行轴减速机112的输入轴连接。
62.设置平行轴减速机112可以解决现有技术中oht小车制造生产的体积过大、重量过重的问题,设置伺服电机111可以实现本实施例中的定位需求。本实施例中第一车体11和第二车体21上均设置有伺服电机111,其目的是通过双伺服电机结构实现比现有技术中的技术方案更加精准的定位效果。
63.当然,根据不同需要,本发明也可以采用其他结构的车体,例如oht装置常用车体结构,此处不在一一解释和列举具体的方案,但能够实现本技术中车体功能的小车应该均在本技术的保护范围内。
64.空中搬运装置还包括防碰撞组件,防碰撞组件设置在第一车体11的首端与第二车体21的尾端。
65.通过设置防碰撞组件,可以实现小车的防撞功能,当前后两小车因误操作而发生碰撞时,由于设置有防碰撞组件可以对前后两小车均进行保护,以提高本实施例的耐用性以及使用寿命;进一步的减少小车内运输晶圆的损坏。
66.参见图1和图6所示,防碰撞组件包括防撞块14和防撞检测单元24,防撞块14设置在第一车体11的首端,防撞检测单元24设置在第二车体21的尾端;或者,防撞块14设置在第二车体21的尾端,防撞检测单元24设置在第一车体11的首端。
67.本实施例中通过设置防撞块14和防撞检测单元24,当相邻两空中搬运装置的车体发生碰撞时,防撞块14会挤压防撞检测单元24,防撞检测单元24检测碰撞后,反馈到控制系统,相邻两空中搬运装置的车体启动自动刹车状态,从而提高了相邻两空中搬运装置的车体的安全性。
68.具体地,防撞检测单元24包括防撞筒体、弹簧、压缩检测块和撞击检测传感器。防撞筒体的一端与对应的第一车体11或者第二车体21固定连接,防撞筒体的另一端为开口端。弹簧设置在防撞筒体中。压缩检测块与开口端卡接设置,压缩检测块的一端与弹簧抵
接,压缩检测块的另一端置于开口端外侧并能够与相邻车体上设置的防撞块14抵接。撞击检测传感器设置在防撞筒体内,撞击检测传感器能够检测压缩检测块的位移并对应发送撞击反馈信号。
69.撞击时,防撞块14与防撞检测单元24发生挤压,使压缩检测块向弹簧方向移动,弹簧对应回缩使压缩检测块缩入防撞筒体内,此时撞击检测传感器能够检测到压缩检测块的位移,从而对应向控制组件发送撞击反馈信号,通过控制组件控制对应的车体启动自动刹车状态,以保证行驶安全性。
70.本实施例还可以采用下述实施例方案,例如在防撞块14和防撞检测单元24的碰撞端设置有用于缓冲的弹性缓冲组件,比如橡胶垫或者海绵等,以减小撞击的瞬间冲力,避免因冲力过大造成防撞块14或者防撞检测单元24的损毁。
71.或者仅将第一车体11和第二车体21的前后端设置弹性缓冲组件,同时在该弹性缓冲组件内侧设置有用于控制车体启动刹车状态的触发控制按钮,当发生碰撞触动上述触发控制按钮时,不需通过控制组件即可实现自行刹车,以提高整体装置对于突发事件的应急处理效率。
72.如图8所示,行进导轨的下表面设置有多个间隔设置的位置条码16,空中搬运装置还包括条码读取反馈组件17,设置在车体的下端,条码读取反馈组件17能够读取位置条码16的位置信息并发送对应的位置信号。
73.本实施例中可以考虑将条码读取反馈组件17设置在第一车体11或者第二车体21下方,当条码读取反馈组件17随着第一车体11或者第二车体21运行至位置条码16时,条码读取反馈组件17能够自动读取位置信息并发送对应的位置信号,上述控制组件能够接收上述位置信号以对第一车体11或者第二车体21的位置进行精确掌控。
74.具体地,在运行的开始时,上端控制组件已将运行路径发给对应的空中运输装置,空中运输装置通过伺服电机111控制实现粗略定位,并且在还没到达设定位置时候进行适度的减速,该减速过程通过程序来进行控制。在到达时慢速通过位置条码16进行精确定位控制。
75.本实施例中的位置条码16可以通过rfid芯片制作,上述条码读取反馈组件17可以对应的为rfid读取器。
76.优选地,空中搬运装置还包括无线取电装置25,设置在车体上并与车体和转向引导组件12电连接。在本实施例中无线取电装置25设置在第二车体21上,用于对上述第一车体11和第二车体21以及其他需要供电的装置进行供电。同时,上述无线取电装置25可以实现无线充电,当车体运行至设定位置时,无需连接充电线路即可完成充电,可以提高本技术技术方案的充电便捷性。
77.本实施例还提供了一种搬运系统,包括上述的空中搬运装置、运输仓和搬运组件,其中运输仓悬吊在车体的下方,搬运组件设置在空中搬运装置的一侧,搬运组件能够将待搬运的半导体设备搬运至运输仓内。
78.本实施例中的搬运系统由于设置有上述实施例中的空中搬运装置可以实现运行转向和精确定位的功能,从而使本实施例中搬运系统的可应用范围更广。
79.本实施例中的搬运系统还包括一套完整的控制系统,该控制系统能够控制空中搬运装置等组件进行相应运输操作,并且能够根据各部件的反馈信号进行调整校正各装置的
运行状态。
80.应当说明的是,上述实施例均可根据需要自由组合。以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。