1.本实用新型涉及输送皮带纠偏技术领域,具体涉及一种皮带机智能纠偏机构。
背景技术:
2.煤炭运输是指煤炭经开采出来后依靠铁路、公路、沿海和内河水运等方式将合格煤炭输送至目的地的过程,而皮带输送机是煤炭运输过程中的主要设备,在煤炭运输中,煤矿开采后,通过皮带输送机将煤炭运输到矿井外。
3.皮带机是皮带输送机的简称,皮带机运用输送带的连续或间歇运动来输送各种轻重不同的物品,输送平稳,结构简单,用途广泛;皮带机的主要部件包括机架、托辊支架和皮带,托辊支架上安装有托辊,托辊用于承受皮带,减小行进阻力,保证皮带运行平稳。
4.皮带“跑偏”的问题在港口作业中普遍存在,有的是由于机架安装不正和皮带接头不正原因造成的,有的则是由于落料点不正造成的。皮带“跑偏”一般会造成沿机撒料、皮带折叠等事故,严重时还会造成皮带的撕裂、刮破,甚至使皮带报废,对设备安全运行构成很大危害;跑偏严重的话会影响正常生产运行,甚至造成输送皮带及其他运转零部件的损坏;目前,传统的皮带纠偏装置主要有两种,一种是机械纠偏,此种纠偏方式纠偏效果不明显,大多是由油缸作为驱动装置的液压纠偏器来纠正皮带的跑偏,但是由于油缸与调心托辊摆动轴的连接完全暴露在外面,所以一段时间后散落的物料粉尘会侵入转动部件导致转动失灵,若不及时维护、修理反而会加剧皮带的跑偏,另一种是普通的液压纠偏,在煤矿井下作业时,不能防爆,可能导致安全隐患;基于此技术背景之下,发明人设计一种皮带机智能纠偏机构,当皮带机出现跑偏时,皮带首先与检测轮接触,检测轮旋转判断纠偏方向,从而带动纠偏托辊按纠偏方向偏转,从而达到纠偏的目的。
技术实现要素:
5.本实用新型的目的在于提供一种皮带机智能纠偏机构,当皮带机出现跑偏时,皮带首先与检测轮接触,检测轮旋转判断纠偏方向,从而带动纠偏托辊组按纠偏方向偏转,使纠偏托辊组与皮带的运行方向形成一个夹角,产生一个反作用分力,推动皮带向中心位移从而达到对皮带纠偏的作用。
6.本实用新型采用的技术方案如下:一种皮带机智能纠偏机构,包括底座及与底座转动连接的纠偏托辊组,纠偏托辊组的宽度大于皮带机皮带的宽度;纠偏托辊组的两侧设有检测轮,检测轮上侧形成的滚动面与纠偏托辊组上对应托管形成的滚动面共平面;底座为方形边框结构,在底座内垂直设有纵梁;位于中间位置的纵梁上设有与纠偏托辊组对应的转轴;在底座的两侧垂直设有安装板;纠偏托辊组下侧设有支撑板;纠偏托辊组通过支撑板与转轴转动连接;在底座上设有控制纠偏托辊组相对底座转动的驱动装置;驱动装置与检测控制系统电连接,检测控制系统用于接收检测轮转动后其产生的信号,并控制驱动装置动作,带动纠偏托辊组上产生信号的一端沿着皮带的运动方向转动;纠偏托辊组相对于底座的转动角度最好为10
‑
60
°
,确保纠偏的时候的皮带偏移的快速与平稳。
7.驱动装置可以是一个步进电机,步进电机直接驱动纠偏托辊组转动,通过电机正反转来调整纠偏托辊组与皮带的偏移角度;驱动装置还可以为导轨丝杠滑台和与导轨丝杠滑台的滑块固定的滑动架;导轨丝杠滑台与底座固定;滑动架上侧设有转动柱,在纠偏托辊组上设有与转动柱相对应的滑动柱;滑动柱与摆杆的一端固定连接,摆杆的另一端设有滑槽;滑槽与转动柱滑动连接。
8.具体的,所述检测控制系统包括控制箱与检测激光传感器;检测激光传感器固定在检测轮的轮架上,用于识别检测的动作;控制箱固定在底座的前侧,控制箱内设有电源单元与plc;电源单元为检测控制系统供电;plc与检测激光传感器电连接,并控制驱动装置动作。
9.本实用新型的有益效果在于:当皮带机出现跑偏时,皮带首先与检测轮接触,检测轮旋转判断纠偏方向,从而带动纠偏托辊组按纠偏方向偏转,使纠偏托辊组与皮带的运行方向形成一个夹角,产生一个反作用分力,推动皮带向中心位移从而达到对皮带纠偏的作用。
10.此外,本发明还具备如下特点:纠偏托辊组的宽度大于皮带机皮带的宽度,纠偏托辊组的两侧设有检测轮;当皮带跑偏后移动到纠偏托辊组的一侧的端部,由于检测轮在纠偏托辊组的端部,皮带偏移后会带动检测轮转动一定的角度;皮带与纠偏辊摩擦,产生一个反作用分力,推动皮带向中心位移从而达到对皮带纠偏的作用;当皮带回正后,两侧的检测轮都不转动,此时为调正状态;纠偏托辊组回到初始的状态。
附图说明
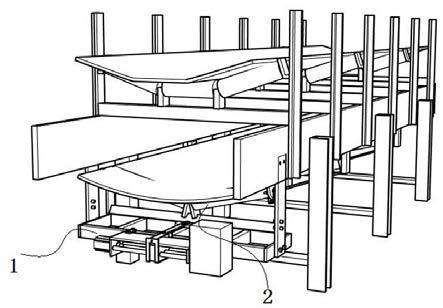
11.图1为本实用新型的立体结构示意图。
12.图2为本实用新型的检测轮位置示意图。
13.图3为本实用新型的支撑板结构示意图。
14.图4为本实用新型的底座结构示意图。
15.图5为本实用新型的滑动架结构示意图。
16.图6为本实用新型的正视图。
17.图7为本实用新型的摆杆结构示意图。
18.图8为本实用新型的电路示意框图。
19.图中:底座1、纠偏托辊组2、检测轮3、纵梁4、转轴5、安装板6、支撑板7、导轨丝杠滑台8、滑动架9、转动柱10、滑动柱11、摆杆12、滑槽13、控制箱14、检测激光传感器15、电源单元16、plc17。
具体实施方式
20.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍,以下所述,仅用以说明本实用新型的技术方案而非限制。
21.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通;对于本领域的普通技术人员而言,可以通过具体情况理解上
述术语在本实用新型中的具体含义。
22.皮带输送机是煤炭运输过程中的主要设备,在煤炭运输中,煤矿开采后,通过皮带输送机将煤炭运输到矿井外,皮带“跑偏”是常见的问题,有的是由于机架安装不正和皮带接头不正原因造成的,有的则是由于落料点不正造成的;基于此,发明人考虑设计皮带机智能纠偏机构,结合图1至图7作进一步详细说明,其原理结构如下。
23.一种皮带机智能纠偏机构,包括底座1及与底座1转动连接的纠偏托辊组2,底座1用于支撑整个装置;在底座1的两侧垂直设有安装板6;将本装置通过底座1两侧的安装板6与皮带机安装,纠偏托辊组2与皮带的下表面挤压接触;纠偏托辊组2上要有一定的偏移余量,因此纠偏托辊组2的宽度大于皮带机皮带的宽度,保证皮带向左或向右偏移后仍然与纠偏托辊组2接触;纠偏托辊组2的具体结构,与皮带机的托管结构相同;纠偏托辊组2的两侧设有检测轮3,检测轮3是一个带有轮架的滚轮,检测轮3上侧形成的滚动面与纠偏托辊组2上对应托管形成的滚动面共平面;检测轮3与纠偏托辊组2的支架固定;底座1为方形边框结构,在底座1内垂直焊接有纵梁4,纵梁4加强底座1的整体结构强度;位于中间位置的纵梁4上设有与纠偏托辊组2对应的转轴5;纠偏托辊组2下侧设有支撑板7;纠偏托辊组2通过支撑板7与转轴5转动连接,具体的方式可以是支撑板7的下侧胀缩连接一个轴承,转轴5与轴承的内径配合,增加了转动的顺滑程度;在底座1上设有控制纠偏托辊组2相对底座1转动的驱动装置;驱动装置与检测控制系统电连接,检测控制系统用于接收检测轮3转动后其产生的信号,并控制驱动装置动作,带动纠偏托辊组2上产生信号的一端沿着皮带的运动方向转动预设的角度;偏托辊组2相对于底座的转动角度最好为10
‑
60
°
,确保纠偏的时候的皮带偏移的快速与平稳;检测轮3可以正好位于纠偏托辊组2的端部,但是最好安装在纠偏托辊组2的两侧,也就是说两个纠偏轮3之间的间距大于纠偏托辊组2的宽度,这样纠偏托辊组2转动一定的角度之后,纠偏轮3之间的间距刚好与皮带的宽度相同;当皮带回正后,两侧的检测轮3都不转动,此时为调正状态;控制系统控制纠偏托辊组2回到初始的状态。
24.驱动装置可以是一个步进电机,步进电机直接驱动纠偏托辊组转动,通过电机正反转来调整纠偏托辊组与皮带的偏移角度,从而通过摩擦力的分力使皮带回正;考虑到便于维修与结构的稳定性,驱动装置还可以为导轨丝杠滑台8和与导轨丝杠滑台8的滑块固定的滑动架9;滑动架9为一个口字型截面的结构,滑动架9的底部与导轨丝杠滑台8的滑块固定;导轨丝杠滑台8与信号检测控制系统电连接,通过信号检测控制系统控制导轨丝杠滑台8的滑块的位置;导轨丝杠滑台9通过连接板、连接角钢的等固定在底座1远离纠偏托辊组2的一端;也就是说导轨丝杠滑台9与纠偏托辊组2存在一定的距离,滑动架9上侧设有转动柱10,在纠偏托辊组2上设有与转动柱10相对应的滑动柱11;滑动柱11与摆杆12的一端焊接固定连接,也就是说摆杆12与滑动柱11为一体的结构,摆杆转动会带动纠偏托辊组2转动;摆杆12的另一端设有滑槽13;滑槽13与转动柱10滑动连接;摆杆12相当于驱动纠偏托辊组2固定的一个驱动杆,所以它最好有一定的结构强度,优选为钢结构,当然为了将强它的结构强度,其上表面可以均匀设置有加强筋(图中未示出);当皮带机出现跑偏时,皮带首先与检测轮3接触,检测轮旋转判断纠偏方向,信号检测控制系统接收到信号后,控制导轨丝杠滑台9的滑块的位置,滑块带动摆杆12移动,这是滑动柱11相对于滑槽13滑动,从而拉动控制纠偏托辊组2转动一定的角度。
25.在本技术中,检测控制系统包括控制箱14与检测激光传感器15;检测激光传感器
14固定在检测轮3的轮架上,用于识别检测的动作;控制箱14固定在底座1的前侧,控制箱14内设有电源单元16与plc17,plc17型号可为fx2n
‑
48mr;电源单元16可以是独立的供电单元也可以与外界电源连接,经过电源单元16内部的变压与交直流转化后为检测控制系统的各部件提供合适的电源与电压;plc17与检测激光传感器15电连接,并控制驱动装置的电机动作;当皮带机出现跑偏时,皮带首先与检测轮3接触,检测轮3旋转检测激光传感器15检测后对plc17传递脉冲信号;从而带动纠偏托辊组2按纠偏方向偏转,使纠偏托辊组2与皮带的运行方向形成一个夹角,产生一个反作用分力,推动皮带向中心位移从而达到对皮带纠偏的作用;当检测轮3停止转动,此时为调正状态;plc17控制纠偏托辊组2回到初始的状态;纠偏托辊组2的转动角度可以由plc17编码控制,但是这样的方式不适合微调,所以可以在安装板6上安装两个转动激光传感器,转动激光传感器用于检测纠偏托辊组2的位置,同时方便进行微调;当时转动激光传感器也要与plc17电连接,与plc17进行通讯。
26.尽管参照前述实例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行和修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。