1.本发明属于无人机意外状况下的防护技术领域,尤其是涉及一种提高无人机物理层安全的防护系统。
背景技术:
2.随着人工智能等科技的发展,无人机越来越多的走进人们的生活,其不但用于拍摄、摄影、监控安防、地形勘察等,而且还用于喷洒农药、物流派送等众多技术领域。无人机一般是通过遥控设备或者是自带的自动行驶技术,以实现拍摄、摄影、监控安防、地形勘察、喷洒农药、物流派送等目的。
3.但是由于无人机是通过无线控制进行信息的传输和交互,其易受到程序故障、硬件故障、电磁干扰、黑客入侵等影响。在受到严重影响时,甚至可能会导致坠机等重大事故。此时无人机不但不能完成既定的目标任务,甚至还会对无人机造成物理损坏。特别是农药喷洒无人机,其体积较大、质量较重,而且携带有有毒物质,如果发生意外坠机,不但会损坏无人机,还有可能对对面的人身、财产等造成损失。
4.基于现有技术中存在的上述技术问题,本技术从物理安全防护出发,从物理层面对无人机,特别是农药喷洒无人机进行保护,防止无人机在受到意外影响导致坠机时,对无人机造成的严重损坏,提高无人机的安全性能,公开了一种提高无人机物理层安全的防护系统。
技术实现要素:
5.针对现有技术不足,本发明的目的在于提供一种提高无人机物理层安全的防护系统,通过设置物理防护措施,无人机在受到意外影响导致坠机时,从物理层面对无人机进行保护,防止、减轻在意外坠落时对无人机造成严重损坏,提高无人机的安全性能。
6.为了解决背景技术中存在的技术问题,本发明提供如下技术方案:一种提高无人机物理层安全的防护系统,包括无人机;所述无人机具有支撑架、旋转翼;所述支撑架包括支腿,相邻两个所述支腿之间连接有横梁;所述支腿底部设置有缓冲层,所述缓冲层由具有弹性的材质制成;所述缓冲层包括有多层:第一缓冲层、第二缓冲层和耐磨层;所述第一缓冲层为橡胶层,第二缓冲层为聚氨酯泡沫层,所述耐磨层为三聚氰胺树脂层;所述聚氨酯层设置在橡胶层的底部;所述三聚氰胺树脂喷涂是聚氨酯泡沫层的底部,由此从上到下依次为橡胶层、聚氨酯泡沫层和三聚氰胺树脂层。
7.优选的,所述支腿为多个,特别是四个,设置在无人机的底部四周,用于无人机着陆时的支撑。
8.优选的,所述第一缓冲层的厚度h1为3
‑
4mm;所述第二缓冲层的厚度h2为2
‑
3.5mm;所述耐磨层的厚度h3为0.2
‑
0.4mm;特别的,为了提高对无人机着陆时的缓冲作用,降低冲击对无人机机体造成的损害,所述第一缓冲层的厚度h1、第二缓冲层的厚度h2和耐磨层的
厚度h3之间满足以下关系:h3=α1
·
(h2 h3)/π;其中,α1为耐磨层厚度系数,取值范围为0.12
‑
0.17。
9.优选的,所述无人机机身的两侧设置有缓冲翅,所述缓冲翅在无人机上能够旋转,所述缓冲翅上设置有缓冲布,所述缓冲布的另一端与无人机连接。
10.优选的,所述缓冲翅通过转轴与无人机连接,所述转轴通过齿轮结构与电机连接。
11.优选的,所述齿轮结构为蜗轮和蜗杆,所述蜗轮与转轴连接,所述电机的输出轴与蜗杆连接,所述蜗轮和蜗杆啮合。
12.优选的,所述无人机内设置有高压气瓶,所述无人机上设置有喷气嘴,所述喷气嘴的喷气口竖直向下设置,所述喷气嘴通过第一气管与高压气瓶连接。
13.优选的,所述无人机机身的左右两侧均设置有喷气嘴,两侧的喷气嘴对称设置。所述喷气嘴有四个,均在无人机的底部。
14.优选的,所述高压气瓶内的气体为空气,所述高压气瓶内的压力为2.0
‑
5.6bar。
15.优选的,所述无人机上设置有测距传感器,所述测距传感器用于测量无人机与地面之间的距离。
16.优选的,所述无人机的机身上设置有防护条,所述防护条包括防护板,所述防护板数量为两个,两个所述防护板之间设置有弹簧,所述弹簧的两端均与相应的防护板连接。
17.优选的,所述缓冲布的为扇形结构,所述缓冲布的夹角α为1/3
‑
1/2rad。
18.优选的,所述第一气管上设置有第一电磁阀,所述电第一磁阀与无人机的控制器连接,以控制第一电磁阀的通断。
19.优选的,所述无人机上还设置有陀螺仪和气压式高度传感器;所述陀螺仪和气压式高度传感器均与无人机的控制器连接。所述陀螺仪用于检测无人机飞行时的速度v、加速度a、倾角β等飞行信息。
20.优选的,所述无人机设置有支撑架,所述支撑架上设置有缓冲气囊,所述缓冲气囊通过第二气管与高压气瓶连通;所述第二气管上设置有第二电磁阀,所述第二电磁阀与无人机的控制器连接。无人机正常飞行和待机时,缓冲气囊中不填充气体。
21.优选的,当无人机出现意外时,所述控制器控制第一电磁阀和/或第二电磁阀打开。
22.优选的,当第一电磁阀打开时,高压气瓶中的气体通过喷气嘴喷出,形成与无人机坠落方向相反的冲击力,以实现对无人机的缓冲作用。
23.优选的,控制器通过采集无人机此时的速度v,根据无人机此时所述的速度v开控制第一电磁阀的开启大小,所述的速度v越大,第一电磁阀的开启幅度越大,即第一电磁阀的开启大小与速度v正相关,由此防止、减轻在意外坠落时对无人机造成严重损坏,提高无人机的安全性能。优选的,所述控制器根据倾角β判断无人机的此时的姿态,选择打开相应的第一电磁阀并控制打开的大小,实现形成与无人机坠落相反的冲击力,而不是造成无人机倾斜更严重。
24.优选的,当第二电磁阀打开时,高压气瓶中的气体进入到缓冲气囊,使缓冲气囊中充气,当无人机着地时实现缓冲作用,防止、减轻在意外坠落时对无人机造成严重损坏,提高无人机的安全性能。
25.优选的,为了进一步提高无人机在下落时的稳定性,所述缓冲布的半径r,无人机的质量m,无人机飞行最大高度h之间满足以下关系:2000
·
n
·
α
·
r2=mh;其中,n为相关系数,取值范围为40
‑
70;r、h的单位为米;m的单位为kg。
26.优选的,当无人机失控时或者出现意外时,无人机在外界环境的作用下机身发生倾斜,当陀螺仪模块检测到倾斜数据后,控制器启动喷气嘴,喷气嘴进行喷气,对无人机的机身倾角进行校正。
27.优选的,所述无人机为农药喷洒无人机,其内部包括盛放农药的农药箱;所述第一气管和第二气管均与农药喷洒无人机的农药箱内部连通;当无人机发生意外时,所述第一电磁阀和第二电磁阀打开,液体农药充入缓冲气囊,并通过喷气嘴喷出,进而更好地对无人机进行保护,防止无人机意外坠机对面的人身、财产等造成严重损失。
28.与现有技术相比,本发明具有以下有益效果:(1)本发明的提高无人机物理层安全的防护系统,通过设置喷气嘴,当无人机失控坠落时,喷气嘴进行喷气,给无人机一个反作用力,能够及时调整无人机的倾斜角度,防止、减轻在意外坠落时对无人机造成严重损坏,提高无人机的安全性能。
29.(2)本发明的提高无人机物理层安全的防护系统,通过设置缓冲气囊,当无人机失控落地时,缓冲气囊内充有气体,缓冲气囊与地面接触起到了缓冲的作用,大大减少了无人机在坠机时的损伤,保证了无人机的安全性能。
30.(3)本发明的提高无人机物理层安全的防护系统,通过设置缓冲翅,在无人机失控下落时,缓冲翅展开,缓冲布与空气接触,增加了无人机下落时的阻力,减小了无人机下落时的速度,降低了无人机与地面接触时的瞬间冲击力,保证了无人机的安全性能。
31.(4)本发明的提高无人机物理层安全的防护系统,通过对缓冲布的半径r,无人机的质量m,无人机飞行最大高度h之间的限定,保证了装置能够平稳地运行,增加了装置的稳定性。
32.(5)本发明的提高无人机物理层安全的防护系统,控制器通过采集无人机此时的速度v,根据无人机此时所述的速度v开控制第一电磁阀的开启大小,所述的速度v越大,第一电磁阀的开启幅度越大,即第一电磁阀的开启大小与速度v正相关,由此防止、减轻在意外坠落时对无人机造成严重损坏,提高无人机的安全性能。
附图说明
33.为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
34.图1是本发明的整体结构示意图。
35.图2是本发明的俯视示意图。
36.图3是本发明的喷气嘴排列示意图。
37.图4是本发明的缓冲气囊设置示意图。
38.图5是本发明的图1局部示意图。
39.图6是本发明的防护条示意图。
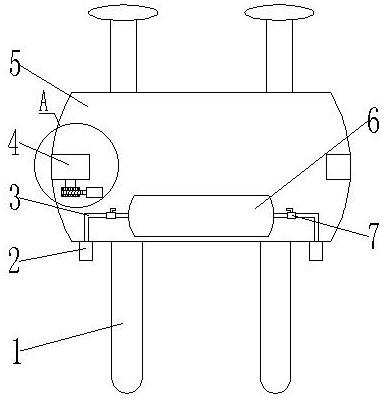
40.图中:1、支撑架;2、喷气嘴;3、第一气管;4、缓冲翅;5、无人机;6、高压气瓶;7、第一电磁阀;8、缓冲布;9、缓冲气囊;10、支腿;11、第二气管;13、转轴;14、蜗轮;15、蜗杆;16、电机;17、横梁;18、防护条;19、弹簧;20、防护板。
具体实施方式
41.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述。显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
42.因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
43.实施例一:如图1
‑
6所示,一种提高无人机物理层安全的防护系统,包括无人机5;所述无人机5具有支撑架1、旋转翼;所述支撑架1包括支腿10,相邻两个所述支腿10之间连接有横梁17;所述支腿10底部设置有缓冲层,所述缓冲层由具有弹性的材质制成;所述缓冲层包括有多层:第一缓冲层、第二缓冲层和耐磨层;所述第一缓冲层为橡胶层,第二缓冲层为聚氨酯泡沫层,所述耐磨层为三聚氰胺树脂层。
44.所述聚氨酯层设置在橡胶层的底部;所述三聚氰胺树脂喷涂是聚氨酯泡沫层的底部,由此从上到下依次为橡胶层、聚氨酯泡沫层和三聚氰胺树脂层。
45.所述支腿10为多个,特别是四个,设置在无人机的底部四周,用于无人区着陆时的支撑。
46.所述第一缓冲层的厚度h1为3
‑
4mm;所述第二缓冲层的厚度h2为2
‑
3.5mm;所述耐磨层的厚度h3为0.2
‑
0.4mm;特别的,为了提高对无人机着陆时的缓冲作用,降低冲击对无人机机体造成的损害,所述第一缓冲层的厚度h1、第二缓冲层的厚度h2和耐磨层的厚度h3之间满足以下关系:h3=α1
·
(h2 h3)/π;其中,α1为耐磨层厚度系数,取值范围为0.12
‑
0.17。
47.实施例二:该实施例与实施例一不同的是,所述无人机机身的两侧设置有缓冲翅4,所述缓冲翅4在无人机5上能够旋转,所述缓冲翅4上设置有缓冲布8,所述缓冲布8的另一端与无人机5连接。所述缓冲翅4通过转轴13与无人机5连接,所述转轴通过齿轮结构与电机16连接。所述电机16与无人机5的控制器连接。
48.所述齿轮结构为蜗轮14和蜗杆15,所述蜗轮14与转轴13连接,所述电机16的输出轴与蜗杆15连接,所述蜗轮和蜗杆互相啮合。
49.实施例三:
该实施例与实施例一和二不同的是,所述无人机5内设置有高压气瓶,所述无人机5上设置有喷气嘴2,所述喷气嘴2的喷气口竖直向下设置,所述喷气嘴2通过第一气管3与高压气瓶连接。
50.所述无人机5机身的左右两侧均设置有喷气嘴2,两侧的喷气嘴2对称设置。所述喷气嘴2有四个,均在无人机5的底部。所述高压气瓶内的气体为空气,所述高压气瓶内的压力为2.0
‑
5.6bar。所述无人机5上设置有测距传感器,所述测距传感器用于测量无人机与地面之间的距离。
51.所述无人机5的机身上设置有防护条18,所述防护条18包括防护板20,所述防护板20数量为两个,两个所述防护板20之间设置有弹簧19,所述弹簧的两端均与相应的防护板连接。所述缓冲布8的为扇形结构,所述缓冲布8的夹角α为1/3
‑
1/2rad。
52.所述第一气管3上设置有第一电磁阀7,所述电第一磁阀7与无人机5的控制器连接,以控制第一电磁阀7的通断及开启大小(开启幅度)。
53.所述无人机5上还设置有陀螺仪和气压式高度传感器;所述陀螺仪和气压式高度传感器均与无人机的控制器连接。所述陀螺仪用于检测无人机飞行时的速度v(单位为米/秒)、加速度a(单位为米/秒2)、倾角β(单位为度,所述倾角为无人机机身与竖直方向的锐角夹角)等飞行信息。
54.所述无人机5设置有支撑架,所述支撑架1上设置有缓冲气囊,所述缓冲气囊通过第二气管11与高压气瓶6连通;所述第二气管11上设置有第二电磁阀,所述第二电磁阀与无人机5的控制器连接。无人机5正常飞行和待机时,缓冲气囊中不填充气体。
55.当无人机出现意外时,所述控制器控制第一电磁阀和/或第二电磁阀打开。当第一电磁阀7打开时,高压气瓶中的气体通过喷气嘴2喷出,形成与无人机5坠落方向相反的冲击力,以实现对无人机5的缓冲作用。
56.所述控制器通过采集无人机5此时的速度v,根据无人机5此时所述的速度v开控制第一电磁阀7的开启大小,所述的速度v越大,第一电磁阀7的开启幅度越大,即第一电磁阀7的开启大小与速度v正相关,由此防止、减轻在意外坠落时对无人机5造成严重损坏,提高无人机5的安全性能。所述控制器根据倾角β判断无人机5的此时的姿态,选择打开相应的第一电磁阀7并控制打开的大小,实现形成与无人机5坠落相反的冲击力,而不是造成无人机5倾斜更严重。
57.当第二电磁阀打开时,高压气瓶中的气体进入到缓冲气囊,使缓冲气囊中充气,当无人机5着地时实现缓冲作用,防止、减轻在意外坠落时对无人机造成严重损坏,提高无人机5的安全性能。
58.为了进一步提高无人机在下落时的稳定性,所述缓冲布的半径r,无人机的质量m,无人机飞行最大高度h之间满足以下关系:2000
·
n
·
α
·
r2=mh;其中,n为相关系数,取值范围为40
‑
70;缓冲布的半径r、无人机飞行最大高度h的单位为米;质量m的单位为kg。
59.当满足以上关系时,所述无人机5在下落时所受的空气阻力与重力能够保持平衡,使得无人机5能够平稳地下落。当n小于40时,缓冲布的半径较小,无人机5下落时受到的阻力较小,在无人机与地面接触时容易产生较大的冲击力,给无人机造成较大的损坏;当n大
于70时,缓冲布的半径较大,无人机5下落时受到的阻力较大,无人机安全着陆用时较长,不利于无人机的管理。
60.当无人机5失控时或者出现意外时,无人机5在外界环境的作用下机身发生倾斜,当陀螺仪模块检测到倾斜数据后,控制器启动喷气嘴,喷气嘴进行喷气,对无人机5的机身倾角进行校正。
61.本发明中的意外,是指无人机在通过遥控器控制时,无法与遥控器进行信息交互,导致无人机失控;或/和通过自行飞行时无法与后控制台进行信息交互,导致无人机失控;或/和无人机5的倾角或/和速度超过预设的阈值;或/和无人机自身发出警报信息等。
62.通过采用本发明的上述技术方案,无人机在意外坠机时,明显降低了对无人机的损害,通过采用本技术的缓冲层、缓冲气囊、喷气嘴等。
63.以无人机5质量m为5kg,飞行高度为50米进行无人机的坠机实验,验证n取不同数值时,无人机下坠时产生的冲击力,当n为30时,无人机下坠用时8s,落地时产生的冲击力为50n,当n为40时,无人机下坠用时10s,落地时产生的冲击力为30n,当n为55时,无人机下坠用时13s,落地时产生的冲击力为26n,当n为70时,无人机下坠用时18s,落地时产生的冲击力为16n,当n为80时,无人机下坠用时30s,落地时产生的冲击力为5n。
64.在本发明中,当无人机失控时或者出现意外时,无人机在外界环境的作用下机身发生倾斜,当陀螺仪模块检测到倾斜数据后,控制器启动喷气嘴,喷气嘴进行喷气,对无人机的机身倾角进行校正,例如,无人机向左发生倾斜时,位于左侧的喷气嘴进行向下喷气,空气反作用于无人机的机身,及时调整无人机的倾斜角度,当陀螺仪的下降速度较大时,控制器控制缓冲翅转动,缓冲布展开,此时缓冲布受到空气的阻力,减小了无人机下降时的速度,当无人机距离地面位于预先设置的阈值范围内,缓冲气囊进行充气,保证在落地地缓冲气囊与地面接触,减小了无人机在降落时受到的冲击力,保证了无人机的降落安全。
65.以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化;凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。