1.本发明涉及电线线缆技术领域,具体涉及一种带状式柔性机器人清洁电缆及其辅助检测装置。
背景技术:
2.随着国内国际工业智能化的迅速发展,越来越多的“智能化”工作代替了人工,在节约人工成本的同时,相应的提高了智能化生产效率和工作产能。“工欲善其事,必先利其器”,只有引进或自主设计研发出精密度可靠的制造和检测设备来进行高量产化生产才能事半功倍。而在工业工厂的生产过程中机器人就是就是先进化、现代化生产的代名词,而作为机器人或工业机床使用配套的机器人电缆则成为了工业机器人的“神经和血管”,机器人电缆自身的重要性以及所带的便利性、实用性毋庸置疑的受到了广大工业制造4.0型企业的青睐,因此很多工厂在对他们的机器设备进行一个全面革新的时候都会选择加购机器人电缆来代替原先的电缆。这样的革新使得他们的机器设备变得更加稳定,不用再担心机器人、机械手设备在生产过程中出现其他的一些不安全作业情况发生。正是因为这样的优势所在,越来越多的工业工厂都需要大量采购机器人电缆系列产品。正所谓有需求就有市场,现今机器人电缆受到这么多人的欢迎,由此可见其未来市场的需求是非常大的,前景发展十分广阔。
3.而作为当前带状式的柔性机器人电缆主要产品设计结构是:第一种结构主要表现在导体采用多股镀锡0.08mm以上导体 400d特多龙丝填充,绝缘采用改性聚氯乙烯或tpe绝缘,屏蔽层采用多股镀锡铜丝进行缠绕(缠绕前段工序无任何屏蔽包带),护套押出采用改性聚氯乙烯或tpe材料,多并式半充实型半雾面挤出;第二种结构是:导体采用多股镀锡0.08mm以上导体 400d特多龙丝填充,绝缘采用改性聚氯乙烯或tpe绝缘,屏蔽层采用多股镀锡铜丝进行缠绕(缠绕前段工序无任何屏蔽包带)或者多股芯线成缆后包覆棉纸带或铝箔麦拉带,完成后进行总缠绕或总编织工序作业,护套押出采用改性聚氯乙烯或tpe材料,整体圆形半充实型半雾面挤出,总体结构设计上柔软度尚可,但在实际拖链运动行程中存在以下多种缺限和不足。
4.主要缺点如下:其一,改性pvc护套拖链耐磨耐老化性能差,缠绕工序完成后一次性并排式挤出,同心度调整困难,拖链测试完成后电气性能耐压测试得不到保障;其二,上述产品结构在运动过程中易产生纵向撕裂,高抗撕性能弱;纯镀锡铜丝缠绕,抗弯折耐扭转性能有一定局限性,特别是在弯曲半径运动状态中会产生空隙并产生绝缘线身表面内部摩擦;其三,纯镀锡导体的耐腐蚀性能和散热能力受阻;改性聚氯乙烯绝缘不能经受长时间来回扭转和快速扭转的运动受力,机械强度过小,使用寿命短;其四,这类线材结构设计,整体拖链过程中接近于单一运动体受力,没有将单一的每条控制线形成合力,使用寿命短;其五,这类带状结构设计的拖链线缆,缠绕部分在统一放线架上放线时,如果遇到缠绕跳股不良时,容易在挤出内模中形成堵塞,造成断线,影响挤出产能和工作效率,变相增加人工成本;其六、线缆结构护套,表面上容易积尘,不耐脏污,无法形成清洁电缆的总体效果。
技术实现要素:
5.为了克服背景技术的不足,本发明提供一种带状式柔性机器人清洁电缆及其辅助检测装置。
6.本发明所采用的技术方案:一种带状式柔性机器人清洁电缆,包括缆芯,其包括7条并列设置的芯线,所述芯线包括从内至外依次设置的导体、绝缘层、屏蔽层、内被层,所述导体由镀镍镍铬铜合金线与凯夫拉纤维绞合而成,所述绝缘层采用etfe材料,由押出机押出成型在导体外侧,所述屏蔽层采用ptfe铝箔绕包带与镀锡铜箔丝导体混合缠绕在绝缘层外侧,所述内被层采用tpee材料,由押出机押出成型在屏蔽层外侧;中被层,其采用pur材料,由押出机充实押出成型在缆芯外侧;护套,其采用tpsiv材料与tpu材料的混合材料,由押出机充实押出成型在中被层外侧。
7.所述芯线直径为2.0
±
0.05mm;所述中被层的长度为15.5
±
0.25mm,宽度为3.25
±
0.25mm,所述中被层的长度两端呈圆弧状;所述护套的长度为18.0
±
0.3mm,宽度为5.75
±
0.3mm,所述护套截面呈长方形,且其四个夹角处呈圆角。
8.一种用于上述的带状式柔性机器人清洁电缆拖链检测的辅助检测装置,包括依次设置在拖链检测设备上的柔性活动治具和固定定位治具,所述柔性活动治具采用柔性塑胶材料,呈柱状结构,其设有19个轴向贯通的通孔,所述通孔呈1 6 12孔位排列方式均匀排列,所述通孔包括位于内侧的7个穿线孔以及靠近边沿的12个闭仓孔;带状式柔性机器人清洁电缆在拖链检测设备上进行拖链测试时,7根芯线分别穿过位于内侧的7个穿线孔后,通过物理发泡的方式填充穿线孔与闭仓孔,将芯线与柔性活动治具固定连接。
9.所述穿线孔的直径比芯线直径大0.3
‑
0.5mm,所述闭仓孔的直径为比芯线直径大0.2
‑
0.3mm。
10.所述固定定位治具包括下压接板、上压接板,所述下压接板固定设置在拖链检测设备上,所述上压接板与下压接板通过合页连接;所述下压接板与上压接板均形成有7个与芯线适配的半圆形压接槽。
11.所述上压接板的半圆形压接槽内形成有穿刺顶针。
12.本发明的有益效果是:1、从根本上实现了平行拖链电缆3000万次以上超高次数拖链寿命;2、完成了平行拖链电缆长期运动中超长耐磨外观良好目标;3、从运行中达到了平衡拖链电缆整体拖链面和弯折形变面均衡受力效果;4、杜绝了电缆表面不干净和受环境噪音影响的不良因素;5、完全释放了平行拖链电缆长久运行中产生的热量,充分保证了整个电缆及其设备超常的生命周期和安全使用的要求。
附图说明
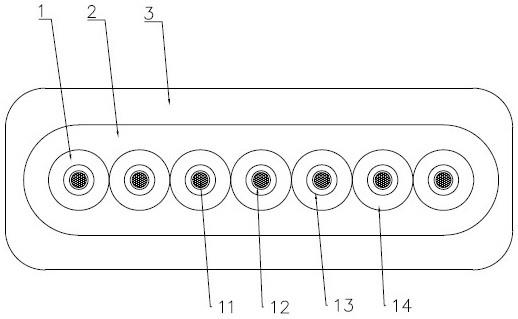
13.图1为本发明实施例带状式柔性机器人清洁电缆的结构示意图。
14.图2为本发明实施例穿线紧固定位装置的结构示意图。
15.图3为本发明实施例柔性活动治具的结构示意图。
16.图4为本发明实施例固定定位治具的结构示意图。
17.图5为本发明实施例固定定位治具夹紧状态下的结构示意图。
具体实施方式
18.下面结合附图对本发明实施例作进一步说明:如图1所示,一种带状式柔性机器人清洁电缆,包括缆芯、中被层2与护套3。
19.所述缆芯包括7条并列设置的芯线,所述芯线1包括从内至外依次设置的导体11、绝缘层12、屏蔽层13、内被层14。
20.所述导体11采用7c*22awg(7/10/0.08mm)镀镍铬铜合金线与杜邦芳纶凯夫拉纤维250d凯夫拉绞合而成,其绞合工艺是通过
ø
300mm极细高速缠绕机进行缠绕绕铜,先进行凯夫拉纤维收轴
ø
300mm装盘并且过导轴油处理,完成后将盘置于最中心,其他70根0.08mm置放在四周均匀放线,绞合节距15mm;单根镍铬铜合金线的放线张力控制在0.020kgf。
21.镀镍铬铜合金导体具有低磁导率,高伸长率,高强度,高辐射率,良好的抗氧化性能;同时具有良好的耐腐蚀性能,耐疲劳性能和耐断裂韧性。而且电阻率低,在高温环境中强度高,长期高温运行不变形,不易改变结构,塑性好,变形修复简单,使用寿命长,散热能力优异。
22.杜邦芳纶凯夫拉纤维具有高抗张、高拉力、高强度、高模量机械性能,同时具有耐高温、耐腐蚀、耐磨性优良特性;并且具有低密度、轻量化、热稳定性好的优点,兼有阻燃,高抗化学性,高稳定性和耐蠕变的多重功能。
23.所述绝缘层12采用etfe材料,选用
ø
30mm特氟龙高温绝缘押出机,押出成型在导体11外侧,绝缘层12采用黑色颜色,按照排序(1~7)依次进行编码印字进行区分和标记,加工单头全螺纹等距突变压缩型螺杆,螺杆的计量段占螺杆总长的25%左右,螺杆顶端呈圆锥形,以防止etfe的停滞和分解,押出螺杆l/d长径比=20~22,加料段、压缩段、计量段的长度比=7:9:6,压缩比=2.8~3.0,加料段螺槽深6.3mm,计量段螺槽深2.0mm,采用挤管式外模,眼模出口处的截面积与包覆etfe部分的截面积拉伸比=50~200。
24.绝缘层12的etfe挤出工艺关键参数如下:1)供料:挤出前烘烤温度:120℃,烘烤时间3~4小时;2)导体预热:导体预热具体以线速和导体押出过程中不变色标准,常规60℃~80℃;3)挤出机机身(从进料口到机头)、机头、模套参考温度:机身(no1)段280℃~300℃,(no2)段300℃~310℃,(no3)段310℃~330℃,(no4)段330℃~340℃,机头330℃~340℃,机头340℃~350℃;4)螺杆的转速和模具保温:一般取5~15转/分钟,模具模口保持温度:350℃~360℃;5)绝缘冷却:从押出机押出后芯线采用水冷,模口和水槽距离小于200mm;6)押出筛网:在押出机螺杆端部应加上2~3层250目的筛网较好,以增加挤出反压力;7)芯线押出质量:塑化良好,锥体透亮,无气泡,表面光滑,锥体和模套间无杂余眼模粘料;作为特氟龙etfe,属于一种乙烯和四氟乙烯的共聚物,该树脂是最坚韧的氟聚合物,可以形成一层高度耐用的涂层,具有卓越的耐化学性,并可在150℃下连续工作。同时,可承受高强度拖链机器人线缆超强的抗机械弯折和扭曲的性能,抗弯折次数可达到5000万
次或以上。
25.所述屏蔽层13采用ptfe铝箔绕包带与镀锡铜箔丝导体混合缠绕在绝缘层12外侧,用极细型
ꢀø
300mm缠绕包带烧结一体机,ptfe铝箔绕包带采用银白色宽4mm厚0.093mm ptfe铝箔绕包包带,镀锡铜箔丝导体采用49/0.08mm镀锡铜箔丝,缠绕屏蔽率100%,按照屏蔽率要求通过plc界面设定缠绕节距;同时通过磁滞进行放线放线张力调整,包带张力为0.05kgf。
26.ptfe铝箔绕包带具有高耐摇摆性能,至少可经受耐摇摆次数超过1000次或以上,抗拉抗压,不易开裂;其次,高度柔软轻绵,不错层,结构稳定。同时,介电常数小,1.6或以下;阻燃防火达到ul94
‑
v0级别。
27.镀锡铜箔丝导体100%屏蔽,高度抗外界杂讯干扰,并且柔软耐弯折,加之为极细同轴缠绕结构,整体柔软度良好。
28.所述内被层14采用tpee材料,由押出机押出成型在屏蔽层13外侧;7条芯线线径
ø
2.0
±
0.05mm,其内被层颜色按从左到右排列依次是:芯线黑色,表面印白色数字编号,从左到右分别是1~6,第7芯是黄绿芯线。采用φ60mm低烟无卤绝缘押出机作业,押出作业前在烘料箱中必须进行4
±
1小时,105
±
5℃连续烘烤,押出温度在185~200℃之间,保持第1段冷却水槽在2~2.5m,采用恒温热水水箱,水箱温度55~60℃;第2段水槽至少保持2层或3层,总长度在30米或以上,保持线材充分冷却。
29.上述内被层14具有超好的加工性能和超长的使用寿命,强度高,柔韧性和动态力学性能更好,具有极高的拉伸强度和优异的耐疲劳性能及耐热性能,是多次循环负载使用条件下的超理想材料;其次具有优异的抗蠕变和耐低温性能,极佳的耐油性能和耐老化性能,良好的机械性能;适用于高柔性运动电缆等动态状态下控制信号传输使用。
30.所述中被层2采用特种pur材料,采用φ100mm外被押出机充实型押出,所述中被层2的长度为15.5
±
0.25mm,宽度为3.25
±
0.25mm,选用特制耐磨抗撕裂和拖链曲挠的pur护层材料,押出前将pur材料充分干燥,在80~100℃条件下烘烤3小时,烘烤前同时将料斗充分除湿,采用高强风枪吹尽灰尘并用棉布擦干净,不留任何杂质,螺杆采用等距不等深双头螺纹螺杆,螺杆长径比l/d=28~30,押出温度范围175~235℃。
31.测量线径和控制线材冷却采用自动精确真空定径技术,真空与水系统分离控制,通过多级水路平衡控制系统与真空系统统一协调,确保生产过程中真空稳定,冷却水液面平稳,水流量大而稳定;并采用双向高速扫描激光测径系统,实现在线监测产品直径值,椭圆度值,测试区间位置值,与牵引机形成闭环控制系统,在线自动调节产品尺寸波动,牵引机驱动采用上下直连伺服电机驱动,提供精确稳定的牵引动作。放线过程中采用穿线紧固定位装置,确保定位有序进入,防止内被芯线错位及跳股而影响押出充实度,并且挤出收线机还采用了变频电机和特殊张力控制器,保证了每一根芯线的放线张力有迟滞马达动力控制。
32.所述穿线紧固定位装置作为辅助挤出设备,其结构如图2所示,包括底座61、活动支架62、穿线铝合金板63、可伸缩支架64、穿线瓷眼孔65。所述底座61通过升降90度角度的不锈钢开口环形卡座,配备12套螺丝/螺帽和3根1米高直径40mm的不锈钢空心管及3个换向轮组成,可以做到高低调整自如,移动和搬运方便,既不影响美观,也不占用空间。所述活动支架62设置在底座61上,能够能够起到可随时移动效果,同时也可以按照高低位置进行自
动调节。所述穿线铝合金板63安装在活动支架62上,各穿线铝合金板63通过可伸缩支架64连接,可伸缩支架64采用具有伸缩张力的弹簧,起到押出过程动态中收缩和力量伸张作用,同时保持每一根内被芯线张力平衡,所述穿线瓷眼孔65可拆卸更换地安装在穿线铝合金板63上,用于芯线通过。
33.所述中被层2具有良好的耐撕裂能力,耐磨性能非常优越;同时耐矿物油和冷却液,耐水解和微生物;其次,耐臭氧耐紫外线,耐老化,耐辐射,耐低温耐水解,透声性好,粘接力强,生物相容性优秀,安装简单方便快捷。
34.所述护套3采用tpsiv材料与tpu材料的混合材料,采用φ100mm热塑性弹性体外被押出机充实型押出,所述护套3的长度为18.0
±
0.3mm,宽度为5.75
±
0.3mm,所述护套3截面呈长方形,且其四个夹角处呈圆角。选用超级耐磨和高抗撕裂的tpsiv tpu共混护套材料完成挤出,押出温度设定范围:180~200℃之间,挤出转速为300转/分钟,挤出线速按照线径大小可自行调节,以线径稳定,外观良好为基准。押出第一段水槽采用恒温热水水槽,水槽温度55~60℃本tpu基体tpsiv护套具有良好的耐磨和耐撕裂能力,耐矿物油,耐臭氧,耐老化(适用温度
‑
45~ 150℃环境工作),耐辐射,耐低温,耐紫外线,耐化学品,生物相容性优秀(耐水解和耐微生物),与人体接触无副作用,无气味,无挥发物,具有优良的拉伸和柔韧性能,且加工性良好,着色性优异,与其他材料相融性好,回弹性好,防水等级高,抗污性强,表面不易吸附灰尘,不易受到污染;机械强度很高(即使处于150℃热空气和高温老化后时)上述带状式柔性机器人清洁电缆采用了热隔离散热和泡沫绝缘热隔离散热原则,导体使用了镍铬合金铜丝,其抗张强度和延伸率均大,并且无磁性;在经受长期运动拖链发热后材料不变脆,在高温下机械强度高,密度接近8.4,耐腐蚀性好,电阻率稳定,表面抗氧化性好,可焊性好,并且加工方便,其内部填充了杜邦芳纶纱,具有低密度、轻量化、热稳定性好的优点,兼有阻燃,高抗化学性,高稳定性和耐蠕变的多重功能。
35.另外,上述带状式柔性机器人清洁电缆呈带状结构,中被层与护套均采用充实型押出成型,构成一个实心结构,整个带状形电缆在受力面积上大大增强了,其次其弯曲运动过程中较圆形拖链电缆的内应力减少了,包括电缆内侧内应力同样减少了,外应力则更加减少了,如此相应地提升了整个电缆的使用寿命。更加关注的是,其运动整个过程中,导体,绝缘层,屏蔽层、内被层、中被层、护套的结构和材质选型,整体综合上提高了本带状柔性清洁控制电缆的拖链测试寿命和最大程度保障了其运动强度的生命周期。
36.如图3
‑
4所示,一种用于上述的带状式柔性机器人清洁电缆拖链检测的辅助检测装置,包括依次设置在拖链检测设备上的柔性活动治具4和固定定位治具5,拖链检测通常采用拖链检测设备进行,其为现有设备,通过对电缆两端固定夹持,并模拟拖链动作实现检测,而柔性活动治具4和固定定位治具5则是一起用于拖链检测过程中的端部定位。
37.所述柔性活动治具4采用柔性塑胶材料,呈柱状结构,其设有19个轴向贯通的通孔,所述通孔呈1 6 12孔位排列方式均匀排列,所述通孔包括位于内侧的7个穿线孔41以及靠近边沿的12个闭仓孔42,其中,所述穿线孔41的直径比芯线1直径大0.3
‑
0.5mm,所述闭仓孔42的直径为比芯线1直径大0.2
‑
0.3mm,带状式柔性机器人清洁电缆在拖链检测设备上进行拖链测试时,7根芯线分别穿过位于内侧的7个穿线孔41后,通过物理发泡的方式填充穿线孔41与闭仓孔42,将芯线与柔性活动治具4固定连接。
38.当带状式柔性拖链清洁芯线在高速运行拖链状态时,虽然两端芯线是固定的,在高速运动状态下,芯线在很大程度上都有较小活动的释放热能空间和伸展空间,这种结构非常有利于提高清洁电缆的整体拖链寿命,这种柔性活动治具4的通孔布局,能够在很大程度上减少了来回拖链电线所承受的外应力和内部弯曲半径运动带来的内应力,而且有利于清洁电缆快速运动产生的热量散发。
39.所述固定定位治具5包括下压接板51、上压接板52,所述下压接板51固定设置在拖链检测设备上,所述上压接板52与下压接板51通过合页53连接;所述下压接板51与上压接板52均形成有7个与芯线适配的半圆形压接槽54,所述上压接板52的半圆形压接槽内形成有穿刺顶针55。
40.带状式柔性机器人清洁电缆在拖链检测设备上进行拖链测试时,7根芯线分别穿过柔性活动治具4后,分别放置在下压接板51的半圆形压接槽54,然后盖上上压接板52实现固定,同时,上压接板52上的穿刺顶针55会将7根拖链清洁芯线,进行刺破压接,固定更加牢靠。
41.采用上述固定定位治具5,解决了手工固定排列和操作困难问题;通过把每根清洁芯线固定在槽位中,解决了手工定位压接安全隐患和发生工伤事故:杜绝了大拇指和中指装配电线时离刀口距离操作太接近;不会混淆芯线和拖链装配位置;特别在疲劳状态,加强了防呆效果;同时降低了人工工时,间接提高了装配拖链布线效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。