1.本发明涉及一种软体执行器,具体涉及一种高速响应软体手指。
背景技术:
2.软体手爪作为软体机器人的典型代表,受到国内外研究人员的广泛关注。
3.软体手爪通常由可承受大应变的柔软材料制成,具有较大的柔韧性和连续变形的能力,环境适应性较强,在复杂易碎物体抓持等应用中具有极大的应用前景。
4.软体手爪通常可以根据实际使用情况,可以采取不同的驱动方式,包括气体驱动方式、线驱动方式、介电弹性体驱动和形状记忆合金驱动方式等。其中气体驱动的软体手爪,具有柔顺性好、控制简单等优点,但存在抓取响应速度慢的缺点。
技术实现要素:
5.为解决背景技术中存在的问题,本发明提出一种高速响应软体手指和手爪,其利用结构的不稳定性,在预拉伸应力下快速动作,同时配合气驱动产生方向运动,以提升软体手指的响应速度,实现可重复快速被动抓取动作。
6.本发明采用的技术方案是:
7.包括多个软体手指和基座;所述的软体手指呈条状,包括手指基体和手指底板,手指基体固定在手指底板上;手指基体沿指长方向间隔布置有至少一个弹性响应结构,各个弹性响应结构结构相同、尺寸相同,弹性响应结构包括了开设在手指基体内部的充气腔、触发块和弹性绳,位于充气腔两侧的手指基体的指腹面均开设有v形凹槽,v形凹槽的v形口朝向手指基体指腹一侧,v形凹槽相当于手指的关节,每个v形凹槽沿指长方向两端处的手指基体部位之间均通过弹性绳弹性连接,且弹性绳始终被拉伸拉紧布置,两个触发块相对安装在充气腔靠近手指基体指腹一侧的充气腔内,且两个触发块支撑布置在充气腔的两侧腔壁之间,触发块的一部分穿出充气腔在靠近手指基体指腹一侧的表面后用于接触外界物体;各个弹性响应结构的充气腔通过手指基体内部的通道进行串接连通,且位于手指基体指根的充气腔和外部的充气装置连通,手指基体在未设有充气腔的指腹面上布置有柔性凸起结构,柔性凸起结构顶面为平面,用于增加抓取的摩擦力。
8.所述的弹性响应结构中,在v形凹槽沿指长方向两端的手指基体内部均开设有条形通槽,条形通槽沿垂直于指长方向布置且均贯穿出手指基体的两侧,条形通槽中安装有一个单体弹性绳固定扣,单体弹性绳固定扣的两端端部设有绳钩,在手指基体同一侧的两个单体弹性绳固定扣端部的绳钩之间连接一根弹性绳;相邻两个弹性响应结构之间相邻处的两个条形通槽相互连通,且该两个条形通槽中的单体弹性绳固定扣相固定连接成一体而形成合体弹性绳固定扣;处于手指基体指尖/指根处的弹性响应结构,弹性响应结构在靠近手指基体指尖/指根一侧的条形通槽替换为设置在手指基体指尖端面和指根端面上开设的条形沉底槽。
9.所述的v形缺口的v形口处在指长方向开设贯通手指基体的多个弹性绳通孔,弹性
绳通孔连通相邻弹性响应结构之间相邻处的两个条形通槽或条形沉底槽,弹性绳通孔,条形沉底槽和条形通槽在同一平面上,在每相邻的两个绳钩上挂接拉伸的弹性绳,每段弹性绳穿过弹性绳通孔实现挂接布置。
10.所述的手指基体为长块状结构,的指背面开设有方槽,方槽贯通穿设手指基体的指背面布置,所述的方槽在靠近手指基体指腹一侧的表面设置为用于便于弯曲的内凹面;所述手指底板指腹面上固定设有异形凸起结构,异形凸起结构中心内凹,方便配合手指弯曲,并且异形凸起结构不能挡住所述的手指基体内部的通道,异形凸起结构嵌装于方槽中,且和方槽之间密封配合装配,使得方槽内部空间形成作为充气腔。
11.所述的充气腔常态下在靠近手指基体指腹一侧的腔壁为拱形,两个所述触发块均是截面为等腰三角形的三角块,两个触发块等腰三角形的底边所在的面之间正对紧贴接触,两个触发块等腰三角形的一侧腰所在的面和充气腔靠近手指基体指腹一侧的腔壁面紧贴接触,使得两个触发块等腰三角形的一侧腰所在的面组合形成的拱形和充气腔在靠近手指基体指腹一侧的腔壁的拱形形状尺寸吻合一致。
12.所述的手指基体指根处的指腹面开设有两个沉孔,沉孔用于螺纹安装螺钉;所述的手指基体指根端面开设有两个固定孔,固定孔用于活插装基座上固定的插销;固定孔内端和沉孔内端之间连通,插销插装入固定孔后再螺钉通过螺纹旋入沉孔并压紧到插销表面,使得插销轴向固定在固定孔中。
13.所述的充气腔在靠近手指基体指腹一侧的表面开设有圆孔,触发块上固定有柱状结构,柱状结构穿过圆孔后伸出并用于接触外界物体。
14.所述的手指基体指根端面设有导气管,位于手指基体指根的充气腔和导气管连通,导气管经管道通过基座连接到外部的充气装置,使得充气装置通过导气管向充气腔内充气。
15.所述的手指基体和手指底板采用的柔性材料为hei
‑
cast 8400材料,所述的手指基体、手指底板和触发块采用硅胶倒模方式制备。
16.所述的软体手指和基座,软体手指的指根固定在基座上,多个软体手指呈非平行布置形成手爪状。
17.本发明的有益效果是:
18.本发明提出的一种高速响应软体手指和手爪,利用结构的不稳定性,实现可重复快速被动抓取动作。
附图说明
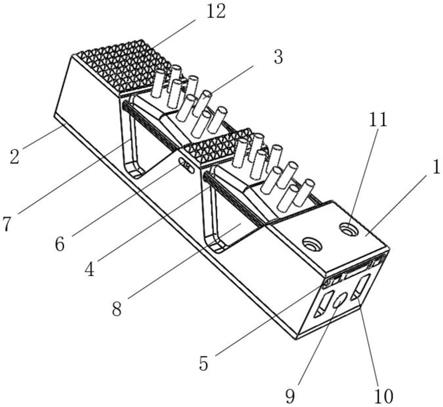
19.图1是软体手指的结构示意图;
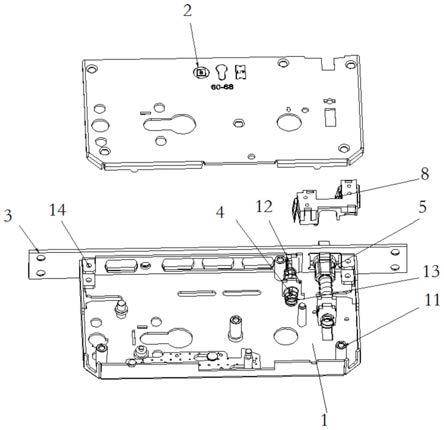
20.图2是软体手指的剖切结构示意图;
21.图3是触发块的结构示意图;
22.图4是手指基体的结构示意图;
23.图5是手指基体的剖切结构示意图;
24.图6是软体手指底板结构示意图;
25.图7是单体弹性绳固定扣的结构示意图;
26.图8是合体弹性绳固定扣的结构示意图;
27.图9是两个高速响应软体手爪组合的软体手爪结构示意图;
28.图10是软体手指在常规状态及弯曲状态的结构示意图;
29.图中:1、手指基体,2、手指底板,3、触发块,4、弹性绳,5、单体弹性绳固定扣,6、合体弹性绳固定扣,7、v形凹槽,8、充气腔,9、导气管,10、固定孔,11、沉孔,12、柔性凸起结构,13、柱状结构,14、圆孔,15、弹性绳通孔,16、条形沉底槽,17、条形通槽,18、方槽,19、异形凸起结构,20、绳钩,21、基座。
具体实施方式
30.下面结合附图及具体实施例对本发明作进一步详细说明。
31.如图1、图2、图4和图5所示,软体手指呈条状,包括手指基体1和手指底板2,手指基体1固定在手指底板2上,手指基体1指根处的指腹面开设有两个沉孔11,沉孔11用于螺纹安装螺钉;手指基体1指根端面开设有两个固定孔10,固定孔10内端和沉孔11内端之间连通,插销插装入固定孔10后再螺钉通过螺纹旋入沉孔11并压紧到插销表面,使得插销轴向固定在固定孔10中,手指基体1和手指底板2采用的柔性材料为hei
‑
cast 8400材料;
32.手指基体1沿指长方向间隔布置有至少一个弹性响应结构,各个弹性响应结构结构相同、尺寸相同,弹性响应结构包括了开设在手指基体1内部的充气腔8、触发块3和弹性绳4,位于充气腔8两侧的手指基体1的指腹面均开设有v形凹槽7,v形凹槽7的v形口朝向手指基体1指腹一侧,v形凹槽9相当于手指的关节,每个v形凹槽7沿指长方向两端处的手指基体1部位之间均通过弹性绳4弹性连接,且弹性绳4始终被拉伸拉紧布置;
33.手指基体1为长块状结构,手指基体1的指背面开设有方槽18,方槽18贯通穿设手指基体1的指背面布置,所述的方槽18在靠近手指基体1指腹一侧的表面设置为用于便于弯曲的内凹面;异形凸起结构19嵌装于方槽18中,且和方槽18之间密封配合装配,使得方槽18内部空间形成作为充气腔8,两个触发块3相对安装在充气腔8靠近手指基体1指腹一侧的充气腔8内,且两个触发块3支撑布置在充气腔8的两侧腔壁之间,触发块3的一部分穿出充气腔8在靠近手指基体1指腹一侧的表面后用于接触外界物体;各个弹性响应结构的充气腔8通过手指基体1内部的通道进行串接连通,且位于手指基体1指根的充气腔8和外部的充气装置连通,手指基体1指根端面设有导气管9,位于手指基体1指根的充气腔8和导气管9连通,手指基体1在未设有充气腔8的指腹面上布置有柔性凸起结构12,柔性凸起结构12顶面为平面,用于增加抓取的摩擦力;充气腔8常态下在靠近手指基体1指腹一侧的腔壁为拱形,两个触发块3等腰三角形的底边所在的面之间正对紧贴接触,两个触发块3等腰三角形的一侧腰所在的面和充气腔8靠近手指基体1指腹一侧的腔壁面紧贴接触,使得两个触发块3等腰三角形的一侧腰所在的面组合形成的拱形和充气腔8在靠近手指基体1指腹一侧的腔壁的拱形形状尺寸吻合一致,充气腔8在靠近手指基体1指腹一侧的表面开设有圆孔14,柱状结构13穿过圆孔14后伸出并用于接触外界物体,手指基体1、手指底板2和触发块3采用硅胶倒模方式制备;
34.在弹性响应结构中,在v形凹槽7沿指长方向两端的手指基体1内部均开设有条形通槽17,条形通槽17沿垂直于指长方向布置且均贯穿出手指基体1的两侧,条形通槽17中安装有一个单体弹性绳固定扣5,在手指基体1同一侧的两个单体弹性绳固定扣5端部的绳钩20之间连接一根弹性绳4;相邻两个弹性响应结构之间相邻处的两个条形通槽17相互连通,
且该两个条形通槽17中的单体弹性绳固定扣5相固定连接成一体而形成合体弹性绳固定扣6;处于手指基体1指尖/指根处的弹性响应结构,弹性响应结构在靠近手指基体1指尖/指根一侧的条形通槽17替换为设置在手指基体1指尖端面和指根端面上开设的条形沉底槽16,v形凹槽7的v形口处在指长方向开设贯通手指基体1的多个弹性绳通孔15,弹性绳通孔15连通相邻弹性响应结构之间相邻处的两个条形通槽17或条形沉底槽16,弹性绳通孔15,条形沉底槽16和条形通槽17在同一平面上,在每相邻的两个绳钩20上挂接拉伸的弹性绳4,每段弹性绳4穿过弹性绳通孔15实现挂接布置。
35.如图3所示,为触发块3的结构示意图,触发块3均是截面为等腰三角形的三角块,触发块3上固定有柱状结构13。
36.如图6所示,为软体手指底板2结构示意图,所述手指底板2指腹面上固定设有异形凸起结构19,异形凸起结构19中心内凹,方便配合手指弯曲,并且异形凸起结构19不能挡住所述的手指基体1内部的通道。
37.如图7所示,为单体弹性绳固定扣5的结构示意图,单体弹性绳固定扣5的两端端部设有绳钩20。
38.如图8所示,为合体弹性绳固定扣6的结构示意图,单体弹性绳固定扣5相固定连接成一体而形成合体弹性绳固定扣6。
39.如图9所示,为两个高速响应软体手爪组合的软体抓手结构示意图,包括两个软体手指和基座21,固定孔10用于活插装基座21上固定的插销,软体手指的指根固定在基座21上,两个软体手指呈非平行布置形成手爪状,导气管9经管道通过基座21连接到外部的充气装置,使得充气装置通过导气管9向充气腔8内充气。
40.如图10所示,为软体手指在常规状态及弯曲状态的结构示意图,在初始状态下,手指基体1为伸直状态,此时触发块3相互紧贴接触,当触发块3接触到外界物体时,触发块3被推动,触发块3不再保持紧贴接触的状态,触发块3向空气腔8内推进,使得空气腔8在弹性绳4的弹力作用下压缩,v形凹槽7压缩贴近,产生弯曲运动,实现手指基体1的快速被动弯曲。
41.本发明的实施例如下:
42.实际工作中,软体手指的指根固定在基座21上,软体手指呈非平行布置形成手爪状,导气管9经管道通过基座21连接到外部的充气装置,使得充气装置通过导气管9向充气腔8内充气;
43.在初始状态下,手指基体1均为伸直状态,充气腔8不充气和外界大气连通,此时触发块3均紧贴接触,当外界物体接触到触发块3时,触发块3被推动,触发块3不再保持紧贴接触的状态,触发块3向充气腔8内推进,空气腔8被压缩,使得异形凸起结构19和v形凹槽7在弹性绳4的弹力作用下弯曲,多个手指基体1快速被动弯曲,使软体手爪呈现握紧外界物体的状态,完成抓取物体的动作;
44.需要手指基体1伸直使得软体手爪松开物体时,使用充气装置通过导气管9向充气腔8内充气,充气腔8鼓起使得触发块3之间重新紧贴接触,手指基体1重新恢复伸直状态,从而使得软体手爪松开物体,重复完成下一次抓取。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。