1.本技术涉及教学设备技术领域,尤其涉及一种书写绘图机器人。
背景技术:
2.网课是最近非常流行的教学方式,是为学习者提供的以互联网为平台、内容包含视频、图片、文字互动等多种形式的系列学习教程,能够一对多进行精准教学。目前的网课仅能以视频、图片、文字互动的方式进行,涉及到需要实际操作的教学时就有点力不从心,比如教学生写字、画画等,老师只能通过视频录制然后发送给学生,无法将作品直接展示给学生,此外,初学写字或者画画时,有些笔顺笔画或者起笔的路径都无法实时呈现,影响教学效果。中国发明专利公开(公告)号cn110421571b公开了一种写字机器人,包括设置有书写区域的“口”字形的基座、动力机构、运动机构、提落笔机构以及四个水平设置的惰轮,所述动力机构包括两个并排设置的安装座、驱动电机一、驱动电机二、同步带轮一、同步带轮二以及传动带。本发明通过两个并联设置的驱动电机控制传动带的转动,来实现移动块可以在铝型材限制的平面内到达任意一点的目的;通过在移动块上部设置快速拆卸结构,拧松移动块上的螺栓一,即可旋转托架上的缺口螺钉至缺口处,实现快速拆下托架的目的;而且在移动块和托架上均内设有两个定位销,可以防止写字过程中笔压纸的力过大,而导致托架向上移动的现象发生。上述公开的发明专利仅对机械部分进行了公开,对于控制部分并没有详细描述,而且也并没有能够进行语言采集并转换成文字并写出字体的功能,仅能够根据既定的程序路径书写,无法满足教学的需要。
技术实现要素:
3.为解决上述问题,本技术采用如下技术方案实现:
4.一种书写绘图机器人,包括主控模块、电机驱动模块、传感器模块、语音模块、机械模块以及通信模块;
5.所述主控模块的第一接口与所述传感器模块电连接;
6.所述主控模块的第二接口与所述语音模块电连接;
7.所述主控模块的第三接口与所述电机驱动模块的控制输入端电连接;
8.所述主控模块的第四接口与所述通信模块的第一端电连接;
9.所述电机驱动模块的控制输出端与所述机械模块连接;
10.所述通信模块的第二端与电脑端电连接;
11.所述主控模块包括stm32芯片,用于传感器模块的数据采集和汇总,并向电机驱动模块发送命令控制机械模块动作;
12.所述电机驱动模块包括步进电机、舵机以及链条构成corexy结构,用于实现平面运动;
13.所述传感器模块用于检测运动部件的位移信号;
14.所述语音模块用于采集语言信息并将语言数据发送给所述主控模块;
15.所述机械模块包括机械臂,所述机械臂上设置有舵机,所述舵机的控制端与所述电机驱动模块的控制输出端连接。
16.优选地,所述步进电机设置有两台。
17.优选地,所述传感器模块为红外反射传感器。
18.优选地,所述语音模块包括ld3320语音模块、syn8266语音模块、喇叭头
19.优选地,所述舵机上设置有笔架,笔架上夹持有笔。
20.优选地,所述通信模块(106)包括串口通信单元和zigbee通信单元,用于与电脑端通信。
21.本技术结构简单,成本低廉,操作方便,便于组装和检修;能够很好地解决现有技术存在的不足。
附图说明
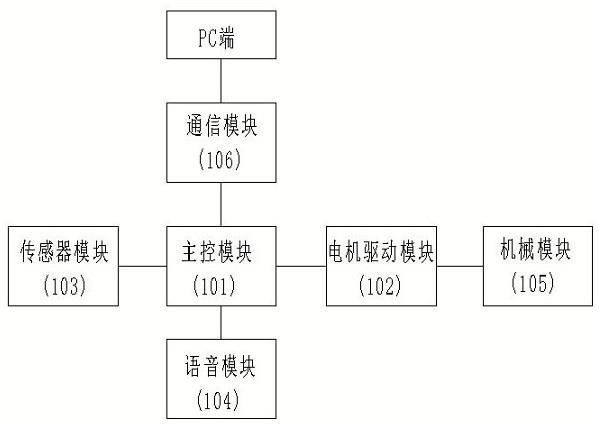
22.图1是本技术提供的实施例结构框图;
23.图2是本技术提供的实施例中主控模块mcu的电路图;
24.图3是本技术提供的实施例中电源、通信模块的电路图;
25.图4是本技术提供的实施例中传感器、电机以及存储单元的电路图;
26.图5是本技术提供的实施例中syn8266语音模块及lcd接口模块的电路图;
27.图6是本技术提供的实施例中ld3320语音模块的电路图。
具体实施方式
28.为使本技术实施方式的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的图1~6,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。因此,以下对在附图中提供的本技术的实施方式的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施方式。在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
29.一种书写绘图机器人,如图1~6所示,包括主控模块101、电机驱动模块102、传感器模块103、语音模块104、机械模块105以及通信模块106。所述主控模块101的第一接口与所述传感器模块103电连接。所述主控模块101的第二接口与所述语音模块104电连接。所述主控模块101的第三接口与所述电机驱动模块102的控制输入端电连接。所述主控模块101的第四接口与所述通信模块106的第一端电连接。所述电机驱动模块102的控制输出端与所述机械模块105连接。所述通信模块106的第二端与电脑端电连接。所述主控模块101包括stm32芯片,用于传感器模块103的数据采集和汇总,并向电机驱动模块102发送命令控制机械模块105动作。所述电机驱动模块102包括步进电机、舵机以及链条构成corexy结构,用于
实现平面运动。corexy是一种3d打印机的结构类型,它类似于i3、卡笛尔等结构的3d打印机一样,是指定于3d打印机框架结构而定义的corexy(主要是并联运动)意味着电机(通常是diy级平台上最大的惯性源)是固定的。这允许快速加速。corexy它的原理是通过两个电机同时控制xy的移动,左右两个电机同向的时候,往x轴移动,两个电机反向的时候往y轴移动。两个电机的同时作用,力量比单个电机控制一轴来得要稳定,还能减少了xy平台上面一个电机的重量。接下来的衍生的结构也是一样的原理。
30.所述传感器模块103用于检测运动部件的位移信号。所述语音模块104用于采集语言信息并将语言数据发送给所述主控模块101。所述机械模块105包括机械臂,所述机械臂上设置有舵机,所述舵机的控制端与所述电机驱动模块102的控制输出端连接。
31.更具体地,主控模块101:包括stm32芯片,主控模块的核心是stm32的芯片,stm32芯片具有低功耗,高性能,体积小等优点,可以完美满足机器人工作时的数据处理等需求。芯片型号为stm32f103zet6,stm32f103zet6是意法半导体公司推出的一款增强型32位基于arm核心的大容量闪存微控制器,具有144个引脚,13个通信接口。主控模块101是书写绘图的控制核心,主要负责传感器模块103的数据采集和汇总,并向电机驱动模块102,机械模块105发送命令控制这些模块动作。主控模块与pc端连接,比如和电脑里的软件数据互通,负责向软件发送数据,以及接收数据,通过串口通信技术,zigbee技术与电脑进行连接,并进行数据交互,stm32将语音等数据传输到电脑软件上,软件翻译转换成文字数据,软件通过串口或者zigbee网关将文字数据返回到机器人的主控模块上,主控模块处理文字数据后向电机驱动模块102发送命令进行书写。
32.电机驱动模块102:电机驱动模块102是由步进电机,舵机,链条等组成,由两个步进电机带动链条,从而控制机械模块105按照规定的轨迹来进行书写,舵机则是控制机械臂的抬笔和下笔。该模块的结构采用的是corexy结构,即通过两个电机的转动同时控制机械臂在平面x
‑
y轴上的移动,两个电机同时控制,力量比单个电机控制要更加稳定,准确度也大大提高。整个结构可以参考现有的成熟corexy结构,或者套用cn110421571b公开的一种写字机器人结构。电机驱动模块102是由主控模块101控制,负责带动机械模块进行运动。
33.传感器模块103:传感器模块103是由分布在x轴和y轴两端的红外反射传感器所组成,红外反射传感器包括有一个发射端和一个接收端,发射端发射红外线,当机器人的机械臂运动到轴的极限边界时,发射端所发射的红外线就会被机械臂反射回接收端,当接收端接收到反射的红外线,便将数据反馈到主控模块101,主控模块101接收到机械臂即将运动到边界的反馈信息后,便控制电机驱动模块102和机械模块105进行换行操作或者终止书写,保证了书写时的稳定性和可靠性。传感器模块103是由主控模块101控制,负责采集机械模块105的运动信息,并将信息及时反馈给主控模块101控制,以便主控模块能及时调整电机驱动模块102和机械模块105的运动。
34.语音模块104:语音模块的主要功能分为语音输入和语音输出,包括有ld3320串口通信版本的语音模块,syn6288语音合成模块和一个喇叭头。其中ld3320语音模块的主要作用是进行语音输入,ld3320语音模块上带有一个麦克风,该语音模块可将语音转换成拼音的形式,再将拼音转化成二进制的ascii码的信息,通过与主控模块连接的串口1将信息发送到主控模块101。syn628,8语音模块的主要功能是进行语音输出,syn8266语音模块通过ttl连接一个喇叭头,syn8266语音模块则连接串口2,主控模块101将语音数据转化成拼音
的形式,然后转化成ascii码的信息,通过串口2发送给syn8266语音模块,syn8266再将接收到的拼音合成语音,通过喇叭头来播放语音。
35.机械模块105:机械模块105是除主控模块101,电机驱动模块102,传感器模块103,语音模块104外,机器人的外壳,轴承,滚轮,机械臂等机械结构,机身结构设计简约实用,合理利用骨骼架构支撑固定各个模块。其中,机械臂是实现书写、绘图功能的重要组成,机械臂末端是笔架和舵机,利用螺旋插件将签字笔固定在笔架上,整个笔架是可以在一定程度上进行上下移动,用舵机控制笔架的上下移动,实现抬笔和落笔动作,以及控制书写时的力度,可以模仿人写字的力度变化,让写出来的字字迹可以更加具有观赏性。
36.通信模块106:通信模块106包括有串口通信和zigbee通信模块cc2530,串口通信是通过usb线连接机器人与电脑使两端之间进行有线通信,串口通信可以避免外界环境的干扰,保障数据的交流,zigbee通信则是通过zigbee模块cc2530,cc2530是与主控模块101连接,以实现机器人与电脑之间的无线通信,cc2530点对点发送速率最高可以达到3300bps,相比于有线通信更加高效和便捷。
37.工作时,可以通过本地或者远程网络方式操作。首先确保所有模块连接正确后,打开机器人,所有模块初始化完成后,机器人进入工作状态,当人对着语音模块的麦克风说话104时(或者麦克风接收网络课程中老师说出的信息),通过ld3320将说话的语句逐字转化成成为拼音,然后将拼音转化成为一串二进制的ascii码信息,通过串口将信息发送给主控模块101,主控模块101在接收到了串口发送过来的信息后进入串口接收中断函数,将接收到的信息通过通信模块106将信息发送到pc端,待pc端的程序将信息转化回文字,进行处理并生成电机运动的轨迹以及舵机的抬笔点和落笔点的数据,并将数据发送给主控模块101,主控模块101根据信息控制电机驱动模块102带动机械模块105的运动,传感器模块103不断将机械模块105的运动轨迹和运动状态反馈回主控模块101方便修正电机的运动,完成书写。在绘画时可以在pc端完成绘制,通过程序生成电机运动的轨迹以及舵机的抬笔点和落笔点的数据,主控模块101可以根据pc端程序生成的电机运动的轨迹以及舵机的抬笔点和落笔点的数据控制电机驱动模块102带动机械模块105的运动,完成绘图。syn8266语音模块连接主控模块101可实现语音提示的功能,在主控模块101中通过编程存入一些常用的字词拼音的二进制数据组成字库数组,当需要进行语音输出时,例如初始化完成后机器人提示:“请输入!”,主控模块101在字库数组中调用这三个字的二进制数据,通过串口发送给syn8266语音模块,syn8266语音模块将接收到的二进制数据转化成拼音,然后合成所要说的语句,通过连接syn8266语音模块的喇叭头播放出来。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。