技术特征:
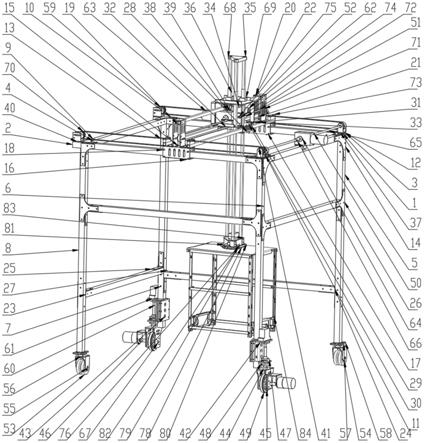
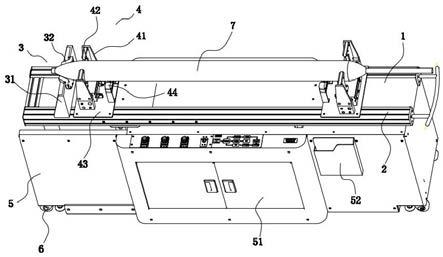
1.一种全自动搬运起重机,其特征在于,包括框架机构、行走机构、三轴机构及吊具(84),所述吊具(84)通过吊具连接法兰(77)连接在三轴机构上,所述行走机构设置在框架机构的下方,所述框架机构由长梁ⅰ(2)、长梁ⅱ(3)、短梁ⅰ(1)、短梁ⅱ(4)、竖梁ⅰ(5)、竖梁ⅱ(6)、竖梁ⅲ(7)和竖梁ⅳ(8)通过连接件连接组合而成,各个长梁ⅰ(2)、长梁ⅱ(3)、短梁ⅰ(1)、短梁ⅱ(4)、竖梁ⅰ(5)、竖梁ⅱ(6)、竖梁ⅲ(7)和竖梁ⅳ(8)之间设置有用于加强结构的辅助横梁ⅰ(23)、辅助横梁ⅱ(24),通过框架连接件a(9)、框架连接件b(10)、框架连接件c(11)、框架连接件d(12)、框架连接件e(13)、框架连接件f(14)、框架连接件g(25)、框架连接件h(26)、框架连接件j(27)对各个结构梁间的位置关系进行约束,所述三轴机构由小车组件、x方向运动组件、y方向运动组件、z向运动组件组成;所述小车组件由小车下支撑板(32)、小车滑块限位轴(30)、小车滑块横向支撑轴(29)、起升轴导向方管(36)、小车滑块b(34)、导向方管固定亚克力块(69)、小车上板(31)、小车滑块a(28)组成,所述小车上板(31)与小车下支撑板(32)形成箱型结构,内部嵌入由导向方管固定亚克力块(69)固定的三根起升轴导向方管(36),所述小车上板(31)下安装小车滑块a(28),所述小车下支撑板(32)下安装两个小车滑块b(34),三个所述小车滑块内部装有小车滑块限位轴(30)以及小车滑块横向支撑轴(29),保证小车组件能够在小车轨道横梁(33)上运动;所述x方向运动组件由同步带(70)、框架上同步带轮座a(37)、x方向短轴(65)、滑动块(15)、限位轴ⅱ(17)、双输出轴电机座(50)、双输出轴电机(64)、联轴器(66)、框架上同步带轮座b(41)、小垫板(73)、限位轴ⅰ(16)、滑块承重轴(18)、张紧板(40)、横梁垫板(72)组成,所述张紧板(40)分别与所述框架上同步带轮座a(37)、框架上同步带轮座b(41)成对安装在框架横梁上,所述双输出轴电机(64)经联轴器(66)、x方向短轴(65)将动力输出给同步带(70),所述滑动块(15)上由于安装有支撑架,使用横梁垫板(72)、小垫板(73)尽量保证同步带(70)的水平,所述滑动块(15)内部的限位轴ⅱ(17)、限位轴ⅰ(16)限制滑动块(15)的运动空间,滑动块(15)及滑块承重轴(18)承担整个机械臂机构的重量;y方向运动组件由横梁厚垫板(74)、横梁盖板(75)、支撑架b(20)、偏心电机(62)、y电机座(52)、同步带轮(59)、横梁同步带(71)、y电机同步带轮座(51)、安装板(21)、小车轨道横梁(33)、支撑架a(19)、横梁垫块(22)组成,所述支撑架b(20)与y电机座(52)安装在安装板(21)上,所述支撑架a(19)、支撑架b(20)通横梁垫块(22)与螺栓安装最高的小车轨道横梁(33),通过横梁厚垫板(74)、横梁盖板(75)将横梁同步带(71)小车下支撑板(32)固定,形成同步带的闭环,所述支撑架a(19)上安装同步带轮(59),且具备张紧功能,所述另一同步带轮(59)安装在y电机同步带轮座(51)上,动力来自于安装在y电机座(52)上的偏心电机(62),小车模块在小车轨道横梁(33)上运动;z方向运动组件由起升电机(63)、起升电机座(38)、三轴上连接件(68)、起升轴(35)、起升滑轮(39)、机械臂端部连接件b(80)、旋转机构圆盘(82)、轴承(76)、起升轴下承重板(78)、机械臂端部连接件a(79)、机械臂端部连接件c(81)、舵机(61)及起升轴舵机座(83)组成,所述安装在起升电机座(38)上的起升电机(63)将动力通过起升滑轮(39)绕卷钢丝绳,所述钢丝绳另一端绕设在起升轴下承重板(78)上,使用三根起升轴(35),穿过小车模块上的起升轴导向方管(36),下端通过机械臂端部连接件a(79)、机械臂端部连接件b(80)、机械臂端部连接件c(81)与起升轴下承重板(78)固定,上端与三轴上连接件(68)固定,所述轴承
(76)装在旋转机构圆盘(82)与起升轴下承重板(78)之间,所述舵机(61)装在由起升轴(35)固定的起升轴舵机座(83)上。2.根据权利要求1所述的一种全自动搬运起重机,其特征在于,所述行走机构示由舵机(61)、轮轴(67)、联轴器(66)、偏心电机座(46)、偏心电机(62)、驱动轮座(45)、车轮(49)、阶梯输出轴(44)、承重连接板(48)、连接夹板(43)、带座轴承(47)、行走机构舵机座(42)、舵机输出轴连接法兰(60)组成,所述轮轴(67)穿过车轮(49),通过联轴器(66)与安装在偏心电机座(46)上的偏心电机(62)相连,所述承重连接板(48)与连接夹板(43)通过螺栓连接将支撑腿夹住,所述承重连接板(48)上部安装行走机构舵机座(42)、舵机(61),所述承重连接板(48)下部折弯处上下各安装一个带座轴承(47),中间穿过阶梯输出轴(44),所述阶梯输出轴(44)上方通过舵机输出轴连接法兰(60)与舵机(61)相连,所述阶梯输出轴(44)下方的螺纹部分穿过驱动轮座(45)并通过螺母将轮座加紧。3.根据权利要求2所述的一种全自动搬运起重机,其特征在于,所述竖梁ⅳ(8)上设置有框架机构行走的从动机构,所述从动机构由万向轮子(53)、万向轮座(54)、万向轮轴(55)、万向轮回转底座(56)、万向轮转动上座(57)、方管连接件(58)组成,所述方管连接件(58)固定在竖梁ⅳ(8)的底部一端,所述万向轮转动上座(57)固定在方管连接件(58)上,所述万向轮回转底座(56)固定在万向轮转动上座(57)的下方,所述万向轮座(54)固定在万向轮回转底座(56)上,所述万向轮轴(55)转动连接在万向轮回转底座(56)上,所述万向轮子(53)固定在万向轮轴(55)的侧壁上。4.根据权利要求3所述的一种全自动搬运起重机,其特征在于,所述框架机构上设置有控制器,所述控制器与舵机(61)、偏心电机(62)及起升电机(63)之间电性连接。
技术总结
本实用新型公开了一种全自动搬运起重机,包括框架机构、行走机构、三轴机构及吊具,所述吊具通过吊具连接法兰连接在三轴机构上,所述行走机构设置在框架机构的下方。本实用新型主要结构包括机械臂机构及吊具、可旋转行走机构,所有机构中均设有驱动装置,保证起重机地灵活性、高效性,其中的机械臂机构是基于笛卡尔坐标系的线性移动机构,轨迹空间易求解,便于实现自动化;其中的可旋转行走机构保证了起重机能够在地面上保证现有姿态沿任何方向移动,这使得起重机不仅能够在固定位置完成分拣或转运任务,还能够通过移动完成重型货物的搬运。运。运。
技术研发人员:吴洪明 张硕 陈佐义 唐健 吴康迪 王昊然
受保护的技术使用者:武汉理工大学
技术研发日:2021.02.08
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。