1.本发明属于垃圾桶技术领域,更具体地说,特别涉及一种可进行自适应夹紧式的垃圾桶。
背景技术:
2.垃圾箱或垃圾桶是存放垃圾的容器,其广泛用于居民区、公园等公共场所,是人们生活中比不可少的日常用品,而垃圾桶上一般都设置有桶盖,用以防止垃圾产生的气体在室内外扩散。
3.如申请号:cn201710652441.3,本发明提出一种垃圾桶,包括桶体、密封结构、接触开关、存水槽、控制装置、喷洒装置等。本发明将原本由桶体上部开口倾倒垃圾的结构设计为下部倾倒结构,并且在倾倒时由于接触开关和控制装置的作用会打开喷洒装置进行桶内壁的清洗,不仅倾倒方便而且进行自动化清洗,另外利用存水槽可以存储雨水进行桶体的清洗,节能环保。
4.类似于上述申请的垃圾桶目前还存在以下几点不足:
5.一个是,现有装置当垃圾倒入后会比较蓬松,从而影响了垃圾的储存量,针对这个问题现有装置不能够通过结构上的改进在开启和关闭盖板时自动实现垃圾桶内垃圾的震动式压实从而达到在人们随手开盖扔垃圾的时候自动实现垃圾的压缩;再者是,目前踩踏式取内桶的垃圾桶已经普遍存在,但是现有装置的踏板尾端一般都是与内桶直接接触的,这样就容易导致内桶的磨损,而不能够通过结构上的改进在踩踏踏板使内桶上升的过程中实现内桶与踏板的间接接触,从而避免了内桶磨损。
6.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种可进行自适应夹紧式的垃圾桶,以期达到更具有更加实用价值性的目的。
技术实现要素:
7.为了解决上述技术问题,本发明提供一种可进行自适应夹紧式的垃圾桶,以解决现有一个是,现有装置当垃圾倒入后会比较蓬松,从而影响了垃圾的储存量,针对这个问题现有装置不能够通过结构上的改进在开启和关闭盖板时自动实现垃圾桶内垃圾的震动式压实从而达到在人们随手开盖扔垃圾的时候自动实现垃圾的压缩;再者是,目前踩踏式取内桶的垃圾桶已经普遍存在,但是现有装置的踏板尾端一般都是与内桶直接接触的,这样就容易导致内桶的磨损,而不能够通过结构上的改进在踩踏踏板使内桶上升的过程中实现内桶与踏板的间接接触,从而避免了内桶磨损的问题。
8.本发明一种可进行自适应夹紧式的垃圾桶的目的与功效,由以下具体技术手段所达成:
9.一种可进行自适应夹紧式的垃圾桶,包括桶体;
10.所述桶体为矩形结构;
11.内桶,所述内桶放置在桶体内;
12.震动臂,所述震动臂安装在桶体上;
13.夹紧结构,所述夹紧结构安装在桶体上;
14.辅助结构,所述辅助结构安装在桶体上。
15.进一步的,所述桶体包括:
16.拨动杆,拨动杆焊接在盖板的左端面,且拨动杆的头端为半球形结构;
17.进一步的,所述震动臂包括:
18.凸起,震动臂上呈矩形阵列状焊接有凸起,且凸起为半球形结构;拨动杆头端卡接在最上方两个凸起的间隙位置,且凸起和拨动杆共同组成了盖板的弹性限位结构,并且凸起和拨动杆还组成了震动臂的震动结构。
19.进一步的,所述桶体包括:
20.卡槽,桶体顶端面开设有一个卡槽,且卡槽为矩形槽状结构,并且卡槽与内桶卡接相连;
21.内桶包括:
22.限位块,内桶外壁对称粘附有两个限位块,且两个限位块均与桶体内壁接触,并且两个限位块共同组成了内桶的辅助限位结构。
23.进一步的,所述桶体还包括:
24.矩形孔a,桶体上开设有矩形孔a,且矩形孔a的内壁顶端面粘附有弹性块a;
25.震动臂包括:
26.挡板,震动臂底端面对称焊接有两个挡板,且两个挡板矩形板状结构;两个挡板分别与弹性块a的左端面和右端面接触,且两个挡板的高度均大于弹性块a的高度,并且两个挡板共同组成了震动臂的滑动限位结构以及弹性块a的保护结构。
27.进一步的,所述矩形孔a的高度为5cm,且矩形孔a的高度大于弹性块a加上震动臂的厚度。
28.进一步的,所述桶体还包括:
29.盖板,盖板转动连接在盖板上,且盖板上焊接有把手,并且把手为凹形结构;
30.夹紧结构包括:
31.座体,座体通过螺栓固定连接在桶体上,且座体上粘附有弹性块b,并且当盖板关闭时把手与弹性块b弹性接触。
32.进一步的,所述震动臂还包括:
33.辅助板,震动臂上焊接有辅助板,且辅助板左端面与内桶外壁接触;辅助板组成了内桶的辅助限位结构,且辅助板的顶端面为倾斜状结构。
34.进一步的,所述桶体还包括:
35.矩形孔b,桶体上开设有矩形孔b;
36.辅助结构包括:
37.转轴,转轴安装在矩形孔b内,且转轴上转动连接有踏板,并且当踏板顺时针转动10度时踏板与震动臂底端面接触。
38.进一步的,所述辅助结构还包括:
39.限位板,限位板焊接在矩形孔b的内壁底端面,且限位板顶端面与踏板底端面接触,并且限位板组成了踏板的逆向转动限位结构。
40.与现有技术相比,本发明具有如下有益效果:
41.通过盖板、拨动杆和震动臂的配合设置,因震动臂上呈矩形阵列状焊接有凸起,且凸起为半球形结构;拨动杆头端卡接在最上方两个凸起的间隙位置,且凸起和拨动杆共同组成了盖板的弹性限位结构,并且凸起和拨动杆还组成了震动臂的震动结构,从而当打开盖板时通过拨动杆对凸起的拨动可实现震动臂的连续震动,进而实现了内桶的连续震动,最终实现了内桶内垃圾的自动压实。
42.通过把手与夹紧结构的配合设置,因盖板转动连接在盖板上,且盖板上焊接有把手,并且把手为凹形结构;座体通过螺栓固定连接在桶体上,且座体上粘附有弹性块b,并且当盖板关闭时把手与弹性块b弹性接触,从而实现了盖板的自适应夹紧关闭。
43.通过震动臂和辅助结构的配合设置,因转轴安装在矩形孔b内,且转轴上转动连接有踏板,并且当踏板顺时针转动10度时踏板与震动臂底端面接触,从而可实现内桶的取出,且还能够避免对内桶的挤压与摩擦。
附图说明
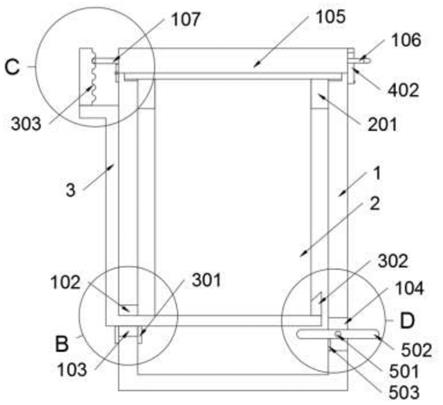
44.图1是本发明的桶体剖开后的轴视结构示意图。
45.图2是本发明图1的a处放大结构示意图。
46.图3是本发明图1的左视结构示意图。
47.图4是本发明图3的b处放大结构示意图。
48.图5是本发明图3的c处放大结构示意图。
49.图6是本发明图3的d处放大结构示意图。
50.图7是本发明图3调整后的结构示意图。
51.图8是本发明图7的e处放大结构示意图。
52.图中,部件名称与附图编号的对应关系为:
53.1、桶体;101、卡槽;102、矩形孔a;103、弹性块a;104、矩形孔b;105、盖板;106、把手;107、拨动杆;2、内桶;201、限位块;3、震动臂;301、挡板;302、辅助板;303、凸起;4、夹紧结构;401、座体;402、弹性块b;5、辅助结构;501、转轴;502、踏板;503、限位板。
具体实施方式
54.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
55.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
56.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的
普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
57.实施例:
58.如附图1至附图8所示:
59.本发明提供一种可进行自适应夹紧式的垃圾桶,包括桶体1;桶体1内放置有内桶2,且桶体1上还安装有震动臂3;桶体1上安装有夹紧结构4,且桶体1上还安装有辅助结构5;参考如图3和图7,桶体1包括拨动杆107,拨动杆107焊接在盖板105的左端面,且拨动杆107的头端为半球形结构;震动臂3包括凸起303,震动臂3上呈矩形阵列状焊接有凸起303,且凸起303为半球形结构;拨动杆107头端卡接在最上方两个凸起303的间隙位置,且凸起303和拨动杆107共同组成了盖板105的弹性限位结构,并且凸起303和拨动杆107还组成了震动臂3的震动结构,从而当打开盖板105时通过拨动杆107对凸起303的拨动可实现震动臂3的连续震动,进而实现了内桶2的连续震动,最终实现了内桶2内垃圾的自动压实。
60.参考如图7和图8,桶体1包括卡槽101,桶体1为矩形桶状结构,且桶体1顶端面开设有一个卡槽101;卡槽101为矩形槽状结构,且卡槽101与内桶2卡接相连;内桶2包括限位块201,内桶2外壁对称粘附有两个限位块201,且两个限位块201均与桶体1内壁接触,并且两个限位块201共同组成了内桶2的辅助限位结构。
61.参考如图4,桶体1还包括矩形孔a102和弹性块a103,桶体1上开设有矩形孔a102,且矩形孔a102的内壁顶端面粘附有弹性块a103;震动臂3包括挡板301,震动臂3底端面对称焊接有两个挡板301,且两个挡板301矩形板状结构;两个挡板301分别与弹性块a103的左端面和右端面接触,且两个挡板301的高度均大于弹性块a103的高度,并且两个挡板301共同组成了震动臂3的滑动限位结构以及弹性块a103的保护结构,从而一方面可实现震动臂3的垂直向滑动,且同时可防止因弹性块a103因受水平向的摩擦力导致粘附处开胶。
62.参考如图4,矩形孔a102的高度为5cm,且矩形孔a102的高度大于弹性块a103加上震动臂3的厚度,从而可保证震动臂3有足够的上升空间。
63.参考如图3,桶体1还包括盖板105和把手106,盖板105转动连接在盖板105上,且盖板105上焊接有把手106,并且把手106为凹形结构;夹紧结构4包括座体401和弹性块b402,座体401通过螺栓固定连接在桶体1上,且座体401上粘附有弹性块b402,并且当盖板105关闭时把手106与弹性块b402弹性接触,从而实现了盖板105的自适应夹紧关闭。
64.参考如图3和图6,震动臂3还包括辅助板302,震动臂3上焊接有辅助板302,且辅助板302左端面与内桶2外壁接触;辅助板302组成了内桶2的辅助限位结构,且辅助板302的顶端面为倾斜状结构,从而在实现内桶2的辅助限位的同时还能够提高内桶2放置时的便捷性。
65.参考如图3图6和图7,桶体1还包括矩形孔b104,桶体1上开设有矩形孔b104;辅助结构5包括转轴501和踏板502,转轴501安装在矩形孔b104内,且转轴501上转动连接有踏板502,并且当踏板502顺时针转动10度时踏板502与震动臂3底端面接触,从而可实现内桶2的取出,且还能够避免对内桶2的挤压与摩擦。
66.参考如图6,辅助结构5还包括限位板503,限位板503焊接在矩形孔b104的内壁底端面,且限位板503顶端面与踏板502底端面接触,并且限位板503组成了踏板502的逆向转动限位结构。
67.本实施例的具体使用方式与作用:
68.在开启和关闭盖板105时,第一,因盖板105转动连接在盖板105上,且盖板105上焊接有把手106,并且把手106为凹形结构;座体401通过螺栓固定连接在桶体1上,且座体401上粘附有弹性块b402,并且当盖板105关闭时把手106与弹性块b402弹性接触,从而实现了盖板105的自适应夹紧关闭;第二,因震动臂3上呈矩形阵列状焊接有凸起303,且凸起303为半球形结构;拨动杆107头端卡接在最上方两个凸起303的间隙位置,且凸起303和拨动杆107共同组成了盖板105的弹性限位结构,并且凸起303和拨动杆107还组成了震动臂3的震动结构,从而当打开盖板105时通过拨动杆107对凸起303的拨动可实现震动臂3的连续震动,进而实现了内桶2的连续震动,最终实现了内桶2内垃圾的自动压实;
69.在踩踏踏板502时,因转轴501安装在矩形孔b104内,且转轴501上转动连接有踏板502,并且当踏板502顺时针转动10度时踏板502与震动臂3底端面接触,从而可实现内桶2的取出,且还能够避免对内桶2的挤压与摩擦;
70.在使用过程中,第一,因两个挡板301分别与弹性块a103的左端面和右端面接触,且两个挡板301的高度均大于弹性块a103的高度,并且两个挡板301共同组成了震动臂3的滑动限位结构以及弹性块a103的保护结构,从而一方面可实现震动臂3的垂直向滑动,且同时可防止因弹性块a103因受水平向的摩擦力导致粘附处开胶;第二,因矩形孔a102的高度为5cm,且矩形孔a102的高度大于弹性块a103加上震动臂3的厚度,从而可保证震动臂3有足够的上升空间。
71.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。