小型旋翼机载sar辅助决策方法、系统及计算机介质
技术领域
1.本发明属于机载sar领域,特别涉及了一种小型旋翼机载sar辅助决策技术。
背景技术:
2.侦察无人机具有造价低、出勤率高、性价比高和时效性强的特点,通过配备的机载摄像机、雷达和红外侦察设备等能够实现捕获传输视频图像的功能。侦察无人机侦察的使用,使得实时性大大提高。
3.对于侦察无人机而言,制定侦察任务时,复杂的地形地势会对路径的规划产生影响。决策辅助,是在以往人工根据侦察任务、覆盖范围等因素制定侦察计划的基础上,利用计算机软件,加入地形的评估,制定出充分发挥无人机作战效能的侦察决策。
4.为保证小型旋翼侦察无人机能够顺利实现侦察任务,需要设计出一套辅助决策技术,实现对侦察区域、侦察任务类型及无人机性能的具体分析,为小型旋翼侦察无人机提供可靠的路线支持,辅助完成雷达侦察决策任务。
技术实现要素:
5.为了解决上述背景技术提到的技术问题,本发明提出了小型旋翼机载sar辅助决策方法、系统及计算机介质。
6.为了实现上述技术目的,本发明的技术方案为:
7.一种小型旋翼机载sar辅助决策方法,包括以下步骤:
8.(1)将数字高程模型图和光学地图进行显示;
9.(2)设置机载雷达参数,并在光学地图上选择扫描区域;
10.(3)根据步骤(2)设置的机载雷达参数和选择的扫描区域,计算出若干条路径并进行显示,这些路径均能够完整扫描被选中区域,同时每条路径会有一个根据时间因素的评分,任意选择其中一条路径进行模拟;
11.(4)显示无人机的位置、当前选择的路径和机载雷达的扫描范围,并且随着时间在数字高程模型图上移动,直到该路径模拟扫描结束;
12.(5)完成一次扫描后,导出该路径的经纬度坐标,并进行保存。
13.进一步地,在步骤(1)中,将数字高程模型图作为主界面显示,将光学地图以小窗口形式显示。
14.进一步地,在步骤(1)中,设置数字高程模型参数,包括图像的缩小倍数、精度,以及需要读取数字高程模型图的范围。
15.进一步地,在步骤(2)中,机载雷达参数包括带宽、工作频率、天线尺寸、脉冲重复周期、雷达工作频率、采样频率和脉冲宽度。
16.进一步地,在步骤(3)中,在扫描遇到障碍物而产生阴影时,计算无人机与障碍物距离r和角度θ,以及无人机对地垂直高度h
′
,得到无人机距障碍物的侧方距离m=rsinθ和障碍物的高度h=h
′‑
rcosθ;
17.无人机在运动时,侧视扫描待探测区域,当监测到有障碍物存在时,记录此时无人机的地理位置和阴影区域开始出现时刻t1和结束时刻t2,根据当前无人机速度v计算出障碍物长度l=v
·
(t1‑
t2);之后继续按原定航线进行飞行,待完成一个条带的扫描区域后,无人机改变原定路径,重新规划路径来探测阴影区域;
18.当障碍物高度h小于无人机高度h
′
时,根据无人机与障碍物的侧方距离m,找到障碍物出现时无人机地理位置关于障碍物中心的对称点,无人机飞行到据此对称点的位置时,开始进行探测,直至行进了l 2δl的距离,从而获得障碍物阴影部位的sar图像,其中δl为保留的余量;
19.当障碍物高度h大于无人机高度h
′
时,无人机此时需要上升相应的高度,直到障碍物高度h小于此时的无人机高度h
′
,并从发现障碍物的位置重新探测。
20.进一步地,在步骤(4)中,无人机能够随时暂停,以便于多角度观察无人机某一时间下的详细状态;能够设置隐藏无人机的运行轨迹。
21.进一步地,在步骤(4)中,在数字高程模型图中显示无人机位置、速度和高度,是否存在阴影的信息以及已经扫描过的范围,在光学地图中显示无人机在当前区域的位置信息。
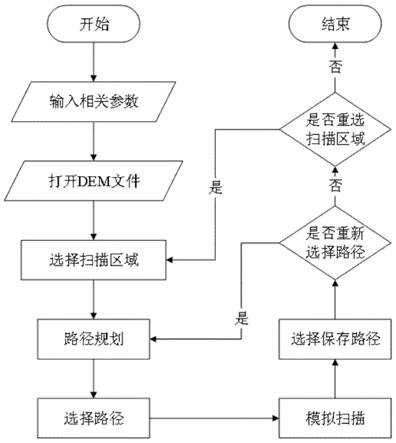
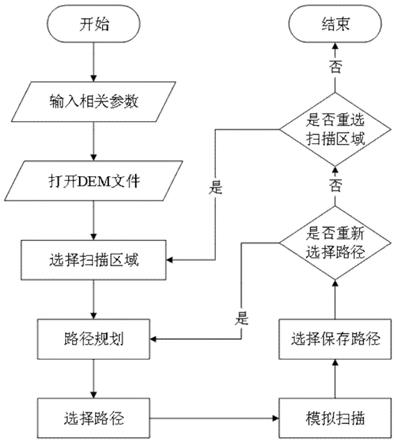
22.进一步地,一次扫描完成后,重新选择路径进行模拟,或者重新选择扫描区域,清空已有路径,重新规划路径。
23.一种小型旋翼机载sar辅助决策系统,包括:
24.dem及地图显示模块,用于显示数字高程模型图和光学地图;
25.路径规划模块,用于设置设置机载雷达参数,在光学地图上选择扫描区域,计算出若干条路径;
26.路径三维模拟模块,用于显示无人机的位置、当前选择的路径和机载雷达的扫描范围,并且随着时间在数字高程模型图上移动;
27.路径导出模块,用于导出该路径的经纬度坐标,并进行保存。
28.一种计算机可读存储介质,用于存储程序,执行所述程序以实现上述小型旋翼机载sar辅助决策方法。
29.采用上述技术方案带来的有益效果:
30.本发明可根据参数读取dem图,并将其三维的展示出来,可以更加直观地观看地形,有助于对无人机的决策,同时可以对比旁边的2d地图,从而综合地进行决策。
31.本发明可在2d地图中框选需要扫描的区域,更加符合用户的操作习惯。
32.本发明提供多条可扫描路径供选择,解决了若某条路径无法实现的问题。3d显示机载雷达扫描状态,位置,可以更加直观的观看扫描状况。扫描过程中无人机随时可以暂停,全方位观看,更加全面地观看雷达的扫描情况。
33.本发明的扫描路径可保存,导出当前路径,供无人机在现实中按照该路径飞行,解决了无人机盲目飞行,机载雷达扫描到的区域与预想区域不同的问题。
附图说明
34.图1是本发明的方法流程图;
35.图2是本发明的系统组成图。
具体实施方式
36.以下将结合附图,对本发明的技术方案进行详细说明。
37.本发明设计了一种小型旋翼机载sar辅助决策方法,如图1所示,具体内容如下:
38.1、将dem作为主要对象在界面中显示,由于dem具有高程信息,因此在界面中以3d效果呈现。用户通过键盘和鼠标能够呈现各个方向视角下的dem及实现地图的缩放。普通光学地图则以小窗口在右下角显示,模拟无人机的光学图像传感器效果,便于用户对地物覆盖情况的观察。
39.查看dem图像前,用户可以修改dem参数,点击“设置dem参数”按钮,会出现修改参数的弹出框,用户可以修改扫描图像的缩小倍数、精度等信息,还可以修改需要读取dem图的范围。设置完成后,用户在主界面菜单栏点击“文件”菜单项,再点击“打开dem图像”按钮,可以在主界面中间打开本地dem图像,以3d图的形式将其显示出来,以便用户查看图像中的高程信息。同时会在主界面旁显示dem对应的2d图像。
40.2、设置雷达参数,用户可以修改雷达相关参数,点击“设置雷达参数”按钮,会出现修改雷达参数的弹出框,可以修改带宽、工作频率、天线尺寸、脉冲重复周期、雷达工作频率、采样频率、脉冲宽度。
41.3、选择扫描区域,在开始扫描之前,用户在2d地图中用鼠标选择出一定矩形的区域,作为扫描区域进行扫描。或者输入矩形四点的经纬度来进行区域的选择。
42.4、路径规划,根据鼠标框选或手动输入的区域及无人机及雷达参数及区域范围,软件在后台会自动计算出若干条路径。计算完成后,会在屏幕上显示若干条附带评分的路径,这些路径都可以完整扫描被选中区域,同时每条路径会有一个根据时间因素的评分,用户可以自主选择一条路径进行模拟。
43.在扫描遇到障碍物而产生阴影时,计算无人机与障碍物距离r和角度θ,以及无人机对地垂直高度h
′
,得到无人机距障碍物的侧方距离m=rsinθ和障碍物的高度h=h
′‑
rcosθ。
44.无人机在运动时,侧视扫描待探测区域,当监测到有障碍物存在时,记录此时无人机的地理位置和阴影区域开始出现时刻t1和结束时刻t2,根据当前无人机速度v计算出障碍物长度l=v
·
(t1‑
t2);之后继续按原定航线进行飞行,待完成一个条带的扫描区域后,无人机改变原定路径,重新规划路径来探测阴影区域。
45.当障碍物高度h小于无人机高度h
′
时,根据无人机与障碍物的侧方距离m,找到障碍物出现时无人机地理位置关于障碍物中心的对称点,无人机飞行到据此对称点的位置时,开始进行探测,直至行进了l 2δl的距离,从而获得障碍物阴影部位的sar图像,其中δl为保留的余量。
46.当障碍物高度h大于无人机高度h
′
时,无人机此时需要上升相应的高度,直到障碍物高度h小于此时的无人机高度h
′
,并从发现障碍物的位置重新探测。
47.5、三维模拟,选择路径后,主界面会增加显示无人机的位置,机载雷达的扫描范围,已经扫描过的范围,以及当前存在遮挡的位置,并且随着时间在3d的dem图上移动,直到
该路径模拟扫描结束。
48.三维模拟过程中随时可以暂停扫描,用户可以在扫描过程中点击“暂停”按钮,无人机随机暂停移动,以便于多角度的观察无人机某一时间下的详细状态,同时可以设置显示或隐藏无人机的运行轨迹。
49.模拟过程中主界面中会显示无人机位置、速度、高度、是否存在阴影的信息,还会显示已经扫描过的范围。同时可以在2d图像中看到无人机在当前区域的位置信息。
50.6、完成一次扫描后,可选择将该路径存储在保存所有路径的文件中,并将该路径保存为一个单独的txt文件,以方便无人机在现实中使用。
51.扫描完成后,可以重新选择路径,若用户选择路径因现实中的某些意外情况无法使用,用户可以在提供的其他路径中重新选择进行模拟。也可以重新选择扫描区域,若用户需要重新选择一片扫描区域,则清空已有路径,重新选择扫描区域,重新规划路径。
52.如图2所示,本发明还设计了一种小型旋翼机载sar辅助决策系统,包括:
53.dem及地图显示模块,用于显示数字高程模型图和光学地图;
54.路径规划模块,用于设置设置机载雷达参数,在光学地图上选择扫描区域,计算出若干条路径;
55.路径三维模拟模块,用于显示无人机的位置、当前选择的路径和机载雷达的扫描范围,并且随着时间在数字高程模型图上移动;
56.路径导出模块,用于导出该路径的经纬度坐标,并进行保存。
57.本发明还欲保护一种计算机可读存储介质,执行所述程序以实现上述小型旋翼机载sar辅助决策方法。
58.实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。