技术特征:
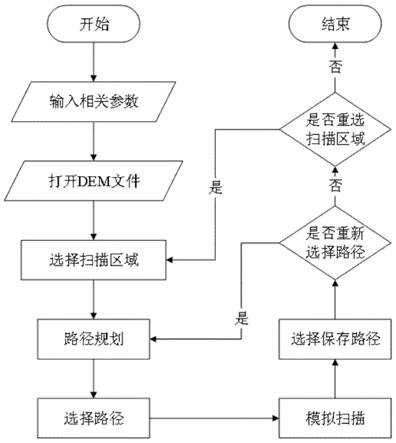
1.一种小型旋翼机载sar辅助决策方法,其特征在于,包括以下步骤:(1)将数字高程模型图和光学地图进行显示;(2)设置机载雷达参数,并在光学地图上选择扫描区域;(3)根据步骤(2)设置的机载雷达参数和选择的扫描区域,计算出若干条路径并进行显示,这些路径均能够完整扫描被选中区域,同时每条路径会有一个根据时间因素的评分,任意选择其中一条路径进行模拟;(4)显示无人机的位置、当前选择的路径和机载雷达的扫描范围,并且随着时间在数字高程模型图上移动,直到该路径模拟扫描结束;(5)完成一次扫描后,导出该路径的经纬度坐标,并进行保存。2.根据权利要求1所述小型旋翼机载sar辅助决策方法,其特征在于,在步骤(1)中,将数字高程模型图作为主界面显示,将光学地图以小窗口形式显示。3.根据权利要求1所述小型旋翼机载sar辅助决策方法,其特征在于,在步骤(1)中,设置数字高程模型参数,包括图像的缩小倍数、精度,以及需要读取数字高程模型图的范围。4.根据权利要求1所述小型旋翼机载sar辅助决策方法,其特征在于,在步骤(2)中,机载雷达参数包括带宽、工作频率、天线尺寸、脉冲重复周期、雷达工作频率、采样频率和脉冲宽度。5.根据权利要求1所述小型旋翼机载sar辅助决策方法,其特征在于,在步骤(3)中,在扫描遇到障碍物而产生阴影时,计算无人机与障碍物距离r和角度θ,以及无人机对地垂直高度h
′
,得到无人机距障碍物的侧方距离m=r sinθ和障碍物的高度h=h
′‑
r cosθ;无人机在运动时,侧视扫描待探测区域,当监测到有障碍物存在时,记录此时无人机的地理位置和阴影区域开始出现时刻t1和结束时刻t2,根据当前无人机速度v计算出障碍物长度l=v
·
(t1‑
t2);之后继续按原定航线进行飞行,待完成一个条带的扫描区域后,无人机改变原定路径,重新规划路径来探测阴影区域;当障碍物高度h小于无人机高度h
′
时,根据无人机与障碍物的侧方距离m,找到障碍物出现时无人机地理位置关于障碍物中心的对称点,无人机飞行到据此对称点的位置时,开始进行探测,直至行进了l 2δl的距离,从而获得障碍物阴影部位的sar图像,其中δl为保留的余量;当障碍物高度h大于无人机高度h
′
时,无人机此时需要上升相应的高度,直到障碍物高度h小于此时的无人机高度h
′
,并从发现障碍物的位置重新探测。6.根据权利要求1所述小型旋翼机载sar辅助决策方法,其特征在于,在步骤(4)中,无人机能够随时暂停,以便于多角度观察无人机某一时间下的详细状态;能够设置隐藏无人机的运行轨迹。7.根据权利要求1所述小型旋翼机载sar辅助决策方法,其特征在于,在步骤(4)中,在数字高程模型图中显示无人机位置、速度和高度,是否存在阴影的信息以及已经扫描过的范围,在光学地图中显示无人机在当前区域的位置信息。8.根据权利要求1所述小型旋翼机载sar辅助决策方法,其特征在于,一次扫描完成后,重新选择路径进行模拟,或者重新选择扫描区域,清空已有路径,重新规划路径。9.一种小型旋翼机载sar辅助决策系统,其特征在于,包括:
dem及地图显示模块,用于显示数字高程模型图和光学地图;路径规划模块,用于设置设置机载雷达参数,在光学地图上选择扫描区域,计算出若干条路径;路径三维模拟模块,用于显示无人机的位置、当前选择的路径和机载雷达的扫描范围,并且随着时间在数字高程模型图上移动;路径导出模块,用于导出该路径的经纬度坐标,并进行保存。10.一种计算机可读存储介质,用于存储程序,其特征在于,执行所述程序以实现权利要求1
‑
8中任意一项所述小型旋翼机载sar辅助决策方法。
技术总结
本发明公开了小型旋翼机载SAR辅助决策方法、系统及计算机介质。根据侦察任务,为操作人员在DEM模型的基础上,实现可视化的辅助选择飞行路线,实现机载高分辨率的SAR在选定区域正确的成像的目的。采用DEM模型作为规划路径的基准地图,在普通地图的坐标信息上增加了高度信息,设置无人机飞行参数、雷达参数,来实现最优飞行路线规划。本发明通过调整参数模拟不同环境下对无人机路径规划的效果,有助于无人机在飞行中做出实时的路线调整。机在飞行中做出实时的路线调整。机在飞行中做出实时的路线调整。
技术研发人员:孔莹莹 刘思源 李秋鹏 洪芳
受保护的技术使用者:南京航空航天大学
技术研发日:2021.07.06
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。