1.本技术涉及远程操作的移动服务机器人。
背景技术:
2.可以操作诸如移动机器人等的移动装置以对诸如表面污染有细菌、病毒或其它病原体的房间等的室内区域进行消毒。通常,此类装置不会为在这样的区域内工作的人提供额外的服务。
技术实现要素:
3.根据本公开的主题的实现,包括移动机器人的装置可以具有:马达,用于驱动驱动系统以使移动机器人在区域中移动;光源,用于输出紫外(uv)光;至少一个传感器;通信接口,用于经由通信网络接收至少一个信号;以及第一控制器,用于控制驱动系统、光源、至少一个传感器和通信接口。移动机器人的操作可以是部分地基于经由通信网络从第二控制器接收到的至少一个信号来控制的,其中,所述第二控制器在远离所述移动机器人正操作的区域的位置处。
4.通过考虑以下详细描述、附图和权利要求,可以阐述本公开的主题的附加特征、优点和实现方式或者使之变得明显。此外,应理解的是,上述发明内容和以下详细描述都是说明性的,并且旨在提供进一步的解释,而不限制权利要求的范围。
附图说明
5.被包括以提供本公开的主题的进一步理解的附图包含在本说明书中,并构成本说明书的一部分。附图还示出本公开的主题的实现,并连同详细描述一起用于解释本公开的主题的实现的原理。结构细节仅是基本理解本公开的主题和实践该主题的各种方式所必需的,而没有更详细地示出。
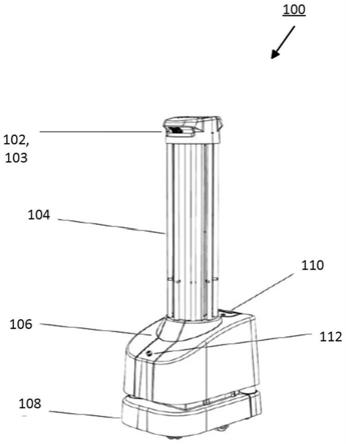
6.图1~3示出根据本公开的主题的实现的移动机器人的多个外部观图,该移动机器人具有用以检测区域中的表面和物体的传感器以及用以输出uv光的光源。
7.图4示出根据本公开的主题的实现的、移动机器人在区域中应用uv光的剂量的路径的示例。
8.图5示出根据本公开的主题的实现的、图1~4中的移动机器人的示例性结构。
9.图6示出根据本公开的主题的实现的可以包括远程平台的网络结构,该远程平台具有用以控制远程位置中的一个或多个移动机器人的接口。
具体实施方式
10.本公开的主题的实现提供了具有可以输出紫外(uv)光以对预定区域进行消毒的光源的移动机器人。移动机器人可以用作室内区域(例如,房间、建筑物、飞机或学校等)和/或室外区域的常规清洁循环的一部分,并可以通过利用uv光破坏传染性疾病、病毒、细菌和
其它类型的有害有机微生物的dna结构来防止和/或减少其在环境中的扩散。移动机器人可以包括用以检测物体、表面和/或人是否在区域内的至少一个传感器。移动机器人可以包括用以检测区域内的声音的麦克风,并且可以包括用以输出通知(例如,移动机器人的操作状态以及消毒操作状态等)或指示等的扬声器。移动机器人的操作可以由移动机器人所包括的第一控制器来控制,和/或可以由与移动机器人通信连接的位于远程的第二控制器来控制。第二控制器可以由用户基于从移动机器人发送的信号来操作,该信号包括传感器信号(例如,可以包括图像和/或视频)和麦克风信号等。第二控制器的用户可以经由通信网络访问和/或操作移动机器人的功能,该通信网络可以包括针对区域和/或移动机器人的本地接入点和/或远程接入点。
11.第二控制器可以接收来自移动机器人的至少一个传感器和/或麦克风的信号,并且可以判断区域内是否有人。在判断为区域内不存在人的情况下,第二控制器可以控制移动机器人的光源的操作以输出uv光来对区域进行消毒。
12.在移动机器人包括麦克风的情况下,麦克风接收到的声音可以经由信号被发送至第二控制器,并且第二控制器的用户可以听到移动机器人附近的任何声音。例如,如果用户听到可能来自人的声音,则第二控制器的用户可以控制移动机器人的光源停止输出uv光。
13.如果机器人上存在至少一个扬声器,则用户可以从第二控制器向移动机器人提供信号以在扬声器上输出,其中信号可以包括通知、指示或警报等。在一些实现中,第二控制器可以包括麦克风,并且由麦克风接收的用户语音可以作为信号发送至移动机器人,移动机器人可以经由扬声器输出信号。在一些实现中,第二控制器的用户可以向移动机器人的扬声器附近的一个或多个人提供使用、操作或维修等的指示。
14.在一些实现中,移动机器人和/或第二控制器可以绘制区域的地图。移动机器人的至少一个传感器可以检测可能在区域内的表面和物体等,并且移动机器人和/或第二控制器可以基于从至少一个传感器接收到的信号来生成该区域的地图。
15.图1~6示出包括移动机器人(例如,图1~6中所示的移动机器人100)的本公开的主题的实现,所述移动机器人具有用以驱动驱动系统(例如,图5中所示的驱动系统108)以使移动机器人在区域(例如,图4中所示的区域300)中移动的马达。移动机器人可以包括用以输出紫外(uv)光的光源(例如,图1、3和5中所示的光源104)。移动机器人可以包括至少一个传感器(例如,图1~3和5中所示的传感器102、102a、102b和106)。
16.移动机器人可以包括用以经由通信网络(例如,图6中所示的网络130)接收至少一个信号的通信接口(例如,图5中所示的网络接口116)。第一控制器(例如,图5中所示的控制器114)可以控制移动机器人的驱动系统(例如,图5中所示的驱动系统108)、光源(例如,图1、3和5中所示的光源104)、至少一个传感器(例如,图1~3和5中所示的传感器102、102a、102b、106)、和/或通信接口(例如,图5中所示的网络接口116)。移动机器人的操作可以是部分地基于经由通信网络(例如,图6中所示的网络130)从远离移动机器人正在操作的区域(例如,图4中所示的区域300)的位置处的第二控制器(例如,图6中所示的服务器140和/或远程平台160)接收到的至少一个信号来控制的。
17.第二控制器可以包括用户接口(例如,图6中所示的用户接口161),该用户接口用以显示由通信接口经由通信网络发送至第二控制器的、由至少一个传感器捕捉的至少一个图像。用户可以基于从移动机器人发送至第二控制器的图像、视频和/或其它传感器数据来
控制移动机器人的移动和/或其它操作。例如,用户可以在传感器检测到在该区域内没有人的情况下控制移动机器人在区域中移动并通过输出uv光来对该区域进行消毒。在一些实现中,第二控制器可以包括麦克风,并且由麦克风接收到的用户语音可以作为信号被发送至移动机器人,移动机器人可以经由扬声器输出信号。第二控制器的用户可以向移动机器人的扬声器附近的一个或多个人提供使用、操作或维修等的指示。
18.在一些实现中,移动机器人可以包括通信连接至第一控制器(例如,图5中所示的控制器114)以捕捉区域(例如,图4中所示的区域300)中的声音的至少一个麦克风(例如,图1~3和5中所示的麦克风103)。通信接口可以向第二控制器(例如,图6中所示的服务器140和/或远程平台160)发送包括所捕捉到的声音的信号。移动机器人接收到的用以控制移动机器人的操作的至少一个信号可以基于包括所捕捉到的声音的信号。也就是说,所捕捉到的声音可以被发送至第二控制器,并且第二控制器可以使用控制信号基于所捕捉到的声音来控制移动机器人。例如,从移动机器人发送至第二控制器的声音可以用于判断区域内是否有人。如果判断为人在区域内,则第二控制器的用户可以停止从机器人的光源输出uv光。在另一示例中,第二控制器的用户可以基于麦克风接收到的声音向判断为在移动机器人附近的一个或多个人提供指示和通知等。
19.移动机器人可包括通信连接至第一控制器(例如,图5中所示的控制器114)以基于从第二控制器(例如,图6中所示的服务器140和/或远程平台160)接收到的至少一个信号输出通知的至少一个扬声器(例如,图5中所示的扬声器107)。该至少一个扬声器可以输出通知(例如状态通知,诸如区域的消毒状态或移动机器人的操作状态等)、用以操作移动机器人的指示、用以将移动机器人安置在区域内的指示、用以向移动机器人提供维护的通知或指示、用以排除移动机器人的操作问题的通知或指示、以及针对移动机器人的操作事件的通知,以上通知或指示包括在经由通信网络在通信接口处接收到的至少一个信号中。
20.移动机器人的通信接口可以基于通信接口所接收到的至少一个信号中包括的请求来发送至少一个输出信号,该至少一个输出信号可以包括至少一个传感器的输出信号、所生成的区域的地图和/或移动机器人的操作状态。
21.在一些实现中,第二控制器(例如,图6中所示的服务器140和/或远程平台160)可以基于经由通信网络从移动机器人接收到的输出信号来判断人是否在区域(例如,图4中所示的区域300)内。在判断为人不在区域内的情况下,第二控制器可以向移动机器人发送控制信号以控制光源输出uv光。也就是说,在(例如,基于来自传感器102、106和/或麦克风103的信号)判断为人不在区域内的情况下,第二控制器可以控制光源104输出uv光以对该区域进行消毒。如果判断为人在区域内,则控制器可以禁止光源输出uv光以防止人受到伤害。
22.在一些实现中,移动机器人的通信接口可以向第二控制器输出通知信号。在移动机器人由于区域内的障碍物(例如,物体、表面和/或其它无生命物体)而不能移动时、移动机器人从用户接口接收请求协助的选择时、区域与用于使移动机器人在区域内移动的区域地图不同时、和/或在移动机器人不能确定其在区域内的位置时,可以输出通知信号。
23.在一些实现中,第一控制器和/或第二控制器可以基于随着移动机器人在区域内移动而由至少一个传感器检测到的物体和/或表面来生成地图。第一控制器和第二控制器中的至少一个对所生成的地图上的物体进行注释。所生成的地图可以包括区域中的由移动机器人的至少一个传感器检测到的房间、门、床、椅子、桌子、设备、楼梯、电梯和物体等。
24.在一些实现中,第二控制器可以使用至少一个信号来控制移动机器人,以进行以下至少之一:将移动机器人部署在区域中、将移动机器人安置在区域中、通过输出uv光对区域进行消毒、和/或控制移动机器人处理操作事件。
25.例如当移动机器人被安置在医院、护理设施、商店、仓库、制造设施、办公楼或其它工作环境、表演场地、博物馆、公共设施、飞机或其它运输车辆或者其它环境中时,可以使用如通篇所述的、可以由第二控制器的用户远程控制的移动机器人布置。在本示例中,技术人员可以取出移动机器人,并且可以激活移动机器人以在医院、护理设施、商店、仓库、制造设施、办公楼或其它工作环境、表演场地、博物馆、公共设施、飞机或其它运输车辆或者其它环境中的至少一个区域中进行操作。第二控制器的用户可以将第二控制器通信连接到移动机器人以进行移动机器人的初始化和/或安置操作。
26.在另一示例中,移动机器人和第二控制器可以用于绘制医院、护理设施、商店、仓库、制造设施、办公楼或其它工作环境、或者其它环境的地图。随着移动机器人在区域中移动,移动机器人的至少一个传感器可以用于检测物体、表面和特征等,并且可以生成区域的地图。在一些实现中,移动机器人和第二控制器可以用于生成地图。第二控制器的用户可以对所生成的地图上的诸如房间、门、电梯、楼梯以及限制进入区域等的一个或多个物体进行注释。
27.在另一示例中,移动机器人和第二控制器可以用于训练移动机器人的一个或多个用户。用于操作机器人的指示可以由第二控制器提供,并且可以由移动机器人的扬声器输出。在一些实现中,第三控制器通信连接至移动机器人,并且第二控制器的用户可以引导和/或协助用户利用移动机器人的操作在第三控制器处进行训练。例如,第二控制器的用户可以引导第三控制器的用户控制移动机器人使用uv光对区域的部分进行消毒。
28.在又一示例中,用户可以经由通信网络从第二控制器与移动机器人通信连接来控制移动机器人的操作,而不是使用户触摸移动机器人来(例如,利用图5中所示的用户接口110)选择移动机器人的操作(例如,以避免细菌或病毒等的扩散)。在一些实现中,用户可以经由第二控制器控制(例如,手动控制)移动机器人以控制移动机器人在区域内移动,和/或可以控制移动机器人的光源以输出uv光来对区域进行消毒。用户可以控制移动机器人的运动,以在诸如由移动机器人的至少一个传感器检测到的障碍物之间引导移动机器人。
29.在另一示例中,当移动机器人自主操作并卡住(例如,它不能在区域内移动)时,移动机器人可以向第二控制器发送通知,其中第二控制器的用户可以协助移动机器人在区域内移动。
30.在又一示例中,移动机器人可以部署在区域(例如,医院、护理设施、商店、仓库、制造设施、办公楼或其它工作环境、或者其它环境)内,第二控制器的用户可以通过控制移动机器人来操作该区域内的机器人以提供消毒服务。
31.图1~3示出根据本公开的主题的实现的移动机器人100的多个外观图,该移动机器人100包括用以检测区域中的表面和物体的传感器,以及用以输出uv以对区域中的空气、物体和/或表面进行消毒的光源。移动机器人100可以包括至少一个传感器102(如图2中的传感器102a和102b所示)、用以输出紫外光的光源104、至少一个传感器106、驱动系统108、用户接口110和/或停止按钮112。控制器(例如,图5中所示和下文所述的控制器114)可以通信连接到至少一个第一传感器102、光源104、至少一个第二传感器106、驱动系统108、用户
接口110和停止按钮112,可以控制移动机器人100的操作。在一些实现中,如图6所示,移动机器人可以由远程平台160经由网络130控制。
32.至少一个第一传感器102(包括图2所示的传感器102a、102b)可以判断移动机器人100的定向(例如,机器人的前侧和/或第一侧所面对的方向)、移动机器人100的位置(例如,移动机器人100在区域中的位置)以及/或者光源104何时在该区域中的表面和/或物体的预定距离之内中的至少一个。在一些实现中,第一传感器102可以检测可以利用来自光源104的uv光进行消毒的空气、表面和/或物体。
33.在一些实现中,至少一个第一传感器102可以具有对角为70度的视场。至少一个传感器102可以具有0.2~4米的检测距离。如图1~3中所示,至少一个第一传感器102可以设置在光源104上方。
34.至少一个第一传感器102可以包括设置在移动机器人100的第一侧上的第一侧传感器和可设置在该装置的第二侧上的第二侧传感器。例如,如图2中所示,传感器102a可以设置在移动机器人100的第一侧(例如,前侧)上,而传感器102b可以设置在移动机器人100的第二侧(例如,后侧)上。尽管图2中示出机器人两侧上的传感器,但是也可以在移动机器人102的不同侧上设置多个传感器,以至少检测表面和/或物体。在一些实现中,传感器102a和/或传感器102b可以设置在光源104上方。
35.光源104可以是一个或多个灯泡、一个或多个灯以及/或者发光二极管(led)或有机发光二极管(oled)阵列,以发射uv光(例如波长为10nm~400nm的光)。uv光的剂量(例如,强度、持续时间、或光功率输出等)可以由控制器114控制,控制器114也可以打开或关闭光源104的部分或全部装置(例如,灯泡、灯、led、oled)。在移动机器人在区域内时、移动机器人在该区域内移动时、在绘制区域的地图之前、在绘制区域的地图期间和/或在绘制区域的地图之后,可以控制光源发射uv光。
36.传感器106可以与图5中所示的控制器114通信连接,并且可以用于检测可能被绘制地图的、并且/或者可以利用来自光源104的uv光进行消毒的空气、表面和/或物体。在一些实现中,传感器106可以确定移动机器人100的定向(例如,机器人的前侧和/或第一侧所面对的方向)、移动机器人100的位置(例如,移动机器人100在区域中的位置)以及/或者光源104何时在该区域中的表面和/或物体(例如,图4中所示的区域300的槽308、床312、或4钩iv支架314等)的预定距离之内中的至少一个。
37.在一些实现中,传感器102、106可以是图像传感器、热传感器、飞行时间传感器、超声传感器、二维(2d)光检测和测距(lidar)传感器、三维(3d)lidar传感器和/或雷达(无线电检测和测距)传感器、立体视觉传感器、3d三照相机、或结构化的光照相机等。传感器106可以具有20~27度的视场。在一些实现中,传感器106可以具有0.05~4米的检测距离。
38.移动机器人100可包括用以驱动驱动系统108以使移动机器人在诸如房间或建筑物等的区域中移动的马达。驱动系统108可以包括轮,该轮可调节以使得驱动系统108可以控制移动机器人100的方向。
39.在一些实现中,移动机器人100可以包括具有驱动系统108的底座,并且传感器102、106可以设置在底座上。
40.控制器114可以在操作模式中控制和/或操作移动机器人100,该操作模式可以是手动模式、自主模式和/或遥控操作模式。在手动模式中,控制器114可以从用户接口110和/
或停止按钮112接收一个或多个控制信号。例如,用户可以通过在用户接口110上进行一个或多个选择来控制移动机器人100的移动、方向和/或停止移动机器人100的运动。停止按钮112可以是紧急停止(estop)按钮,该紧急停止按钮可以在被选择时停止移动机器人100的所有操作和/或移动。在一些实现中,当在遥控操作模式中操作时,控制器114可以经由网络接口116(图5中所示)接收至少一个控制信号。例如,如下面结合图6所述,网络接口可以经由网络130从服务器140和/或远程平台160接收控制信号。
41.在一些实现中,当移动机器人100沿方向移动时,传感器102、106可以检测一个或多个表面和/或物体(例如,图4中所示的区域300的槽308、床312、4钩iv支架314和/或其它物体和/或表面)的几何形状。至少一个第一传感器102的输出可以是例如移动机器人100的路径中的一个或多个物体的点云。当传感器102和/或传感器106是立体视觉传感器时,可以在预定时间点和/或以预定时间间隔用全局快门捕捉彼此间的距离在已知距离内的两个传感器(即,两个传感器可以是传感器102和/或传感器106的立体视觉传感器的一部分)的图像。全局快门可以被配置成使得立体视觉传感器的两个传感器可以几乎同时捕捉图像。可以根据所捕捉到的图像确定一个或多个特征,并且对该一个或多个特征彼此进行比较以确定匹配的部分。由于立体视觉传感器的两个传感器的焦距和两个传感器之间的距离(例如,约6cm)可以存储在存储器118和/或固定存储装置120(如图5中所示)中,因此控制器114和/或至少一个第一传感器102可以使用所捕捉到的图像和所存储的值来确定传感器102、106到表面和/或物体的距离,并且可以由处理器用来从光源输出uv光。在一些实现中,在物体可能没有识别特征(例如,空白壁)时,传感器102、106可以包括至少一个激光器、led和/或oled,以辐照物体或表面上的一个或多个点。
42.在检测表面和/或物体时,传感器102、106可以是飞行时间(tof)传感器。光的至少一个光子可以由传感器102、106输出,并且可以通过空气发送。在光的至少一个光子辐照在表面和/或物体上时,光的一部分可以被表面和/或物体反射并且可以返回到传感器102、106的接收器部分。传感器106可以计算发送光的至少一个光子和接收反射之间的时间,并将该值乘以光在空气中的速度,以确定传感器102、106与表面和/或物体之间的距离。这可以用来生成移动机器人正操作的区域的地图。
43.图5示出适于提供本公开的主题的实现的移动机器人100的示例性组件。移动机器人100可以包括总线122,该总线122使移动机器人100的主要组件互连,主要组件诸如驱动系统108、可操作以经由合适的网络连接与一个或多个远程装置通信的网络接口116、控制器114、存储器118(诸如随机存取存储器(ram)、只读存储器(rom)、或闪速ram等)、停止按钮112、光源104、至少一个第一传感器102、可以包括一个或多个控制器并且与用户输入装置(诸如键盘和触摸屏等)相关联的用户接口110、固定存储装置120(诸如硬盘驱动器和闪速存储装置等)、以及传感器106、麦克风103和/或用以输出音频通知和/或其它信息的扬声器107等。
44.总线122允许控制器114与一个或多个存储器组件之间的数据通信,如前所述,该存储器组件可以包括ram、rom和其它存储器。通常,ram是加载操作系统和应用程序的主存储器。rom或闪速存储器组件可以包含基本输入输出系统(bios)和其他代码,该基本输入输出系统控制诸如与外围组件的交互等的基本硬件操作。驻留在移动机器人100上的应用通常存储在计算机可读介质(例如,固定存储装置120,诸如固态驱动器、硬盘驱动器、光驱动
器、固态驱动器或其它存储介质等)上并经由计算机可读介质访问。
45.网络接口116可以经由有线或无线连接(例如,图6中所示的网络130)提供与远程服务器(例如,图6中所示的服务器140、数据库150和/或远程平台160)的直接连接。网络接口116可以使用本领域技术人员容易理解的任何合适的技术和协议(包括数字蜂窝电话、wifi、和近场等)来提供这种连接。例如,如下文进一步详细描述,网络接口116可以允许移动机器人100经由一个或多个局域网、广域网或其它通信网络与其它计算机通信。移动机器人可以经由网络接口将数据发送至远程服务器,该远程服务器可能包括操作路径、以及用uv光辐照的表面和/或区域等。
46.许多其它装置或组件(未示出)可以以类似的方式连接。相反地,不需要图5中所示的所有组件都存在来实践本公开。这些组件可以以与所示不同的方式互连。实现本公开的代码可以存储在计算机可读存储介质(诸如存储器118、固定存储装置120中的一个或多个等)中、或者存储在远程存储位置上。
47.图6示出根据本公开的主题的实现的示例性网络布置。上述移动机器人100和/或类似的移动机器人200可以经由网络130连接到其它装置。网络130可以是局域网、广域网、因特网或任何其它合适的一个或多个通信网络,并且可以在包括有线和/或无线网络的任何合适的平台上实现。移动机器人100和/或移动机器人200可以彼此通信,和/或可以与一个或多个远程装置(诸如服务器140、数据库150和/或远程平台160等)通信。远程装置可以由移动机器人100、200直接访问,或者一个或多个其它装置可以提供中间访问,诸如服务器140提供对数据库150中所存储的资源的访问等。移动机器人100、200可以访问远程平台160或由远程平台160提供的服务(诸如云计算布置和服务等)。远程平台160可以包括一个或多个服务器140和/或数据库150。
48.更一般地,本公开的主题的各种实现可以包括计算机实现的处理和用于实践这些处理的设备或者以计算机实现的处理和用于实践这些处理的设备的形式体现。实现也可以以具有计算机程序代码的计算机程序产品的形式体现,该计算机程序代码包含在非瞬时性和/或有形介质(诸如固态驱动器、dvd、cd-rom、硬盘驱动器、usb(通用串行总线)驱动器或任何其它机器可读存储介质等)中体现的指令,使得当计算机程序代码加载到计算机中并由计算机执行时,计算机成为用于实践本公开的主题的实现的设备。实现也可以以计算机程序代码的形式体现,例如,计算机程序代码存储在存储介质中、由计算机加载和/或执行、或者通过某些传输介质(诸如通过电线或线缆、通过光纤或经由电磁辐射等)进行发送,使得当计算机程序代码加载到计算机中并由计算机执行时,计算机成为用于实践本公开的主题的实现的设备。当在通用微处理器上实现时,计算机程序代码段将微处理器配置为创建专用逻辑电路。
49.在一些配置中,存储在计算机可读存储介质上的计算机可读指令集可以由通用处理器实现,该计算机可读指令集可以将通用处理器或包含通用处理器的装置转换为被配置成实现或执行指令的专用装置。实现可以包括使用具有处理器的硬件,诸如在硬件和/或固件中体现根据本公开的主题的实现的全部或部分技术的通用微处理器和/或专用集成电路(asic)等。处理器可以连接至存储器,诸如ram、rom、闪速存储器、硬盘或能够存储电子信息的任何其它装置。存储器可以存储适于由处理器执行以进行根据本公开的主题的实现的技术的指令。
50.为了解释目的,已经参考具体实现描述了上述说明。然而,以上的说明性讨论并不旨在详尽本公开的主题的实现或将本公开的主题的实现限于所公开的精确形式。鉴于以上的教导,许多修改和变化是可能的。选择和描述了实现以解释本公开的主题的实现的原理及其实际应用,从而使本领域技术人员能够利用这些实现以及适合特定预期用途的具有各种修改的各种实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。