1.本发明属于空间时频传递技术领域,特别涉及一种星地双向时间比对方法和系统。
背景技术:
2.目前常用的远距离时间传递方法包括了激光时间比对、双向时间比对、共视法等,受限于原子钟精度和硬件水平,精度最高只能达到亚ns量级,这使得高精度时频基准在空间科学中的广泛应用受到限制。利用地球空间微重力和低干扰等环境优势在空间航天器搭载运行不同特性的原子钟或原子钟组,实现较地面精度高一个量级以上的时间频率信号源,并在空间建立稳定度和不确定度优于1e
‑
17量级的空间高精密时间频率产生和运行系统(简称空间精密时频基准)。空间精密时频基准建成后,首要的任务是对其时频性能进行准确的评估,然后可以进一步利用其实现高精度时间传递,从而满足空间各类航天器及地面用户的高精度时间需求。
技术实现要素:
3.为了克服现有技术的不足,本发明提供一种高精度星地时间比对系统,基于微波链路同频模式,通过空地双向测量微波链路同频模式有效修正和减小电离层和对流层等误差,实现空间航天器与地面站之间的高精度时间比对,最终实现ps量级的星地时间比对精度。
4.本发明解决其技术问题所采用的技术方案是:一种基于同频模式的高精度星地双向时间比对方法,包括以下步骤:
5.步骤1,地面站和航天器分别向对方发射同一频点f1的微波测距信号,获得f1频点的下行观测伪距和上行观测伪距;
6.步骤2,将f1频点下行伪距和上行伪距配对组成双向单程测量伪距组合,计算获得地面站和空间航天器时频设备之间的星地双向相对钟差;
7.步骤3,计算并扣除双向相对钟差计算时的各项误差,实现星地时间同步;所述的各项误差包括设备时延误差、运动时延误差、周期性相对论效应误差和引力时延误差。
8.所述的双向单程测量伪距组合为地面站和空间航天器相互同时收或发的两个单向测量的组合。
9.所述伪距的测量距离均采用相位中心,利用提前标定的相位中心结果将精密定轨处理结果分别修正到航天器接收天线和发射天线的相位中心坐标值。
10.所述的航天器采用不同的微波时频天线a和b对地收发信号,在同频模式下,双向单程测量伪距组合表达为
[0011][0012]
其中,g表示地面站,s表示航天器,c为真空光速,t
snd
和t
rcv
分别为发射和接收时刻,和分别为f1频点的下行测量伪距和f1频点的上行测量伪距;r
a
和r
b
分别为航天器天线a和b的相位中心位置矢量,x
s
和x
g
分别为航天器和地面站钟差,δ
snd
和δ
rcv
为信号发射通道和接收通道的硬件传输时延,δ
rel
为周期性相对论效应等效时延,δ
of
为相位中心偏移等效时延,δ
g
是引力时延,ε为测距噪声。
[0013]
所述的步骤2中,假设地面站和航天器之间的钟差为δt,则t0时刻的空间航天器与地面站的相对钟差
[0014][0015]
其中,δd为空间距离不一致误差修正量,dx(t,t0)为t时刻到t0时刻的钟差非同时误差修正量,dx
g
和dx
s
分别表示地面站g和航天器s的钟差非同时误差修正量。
[0016]
所述的运动时延误差利用精密星历和精密钟差文件将不同时刻和天线位置的同频双向单程观测伪距进行时标归算和运动时延误差修正,
[0017]
距离补偿
[0018]
钟差补偿
[0019]
所述的周期性相对论效应误差其中,w0为地球大地水准面上的重力势;gm为地球引力常数;a为空间航天器运行的半长轴;
r为地球非球形引力势扰动;r为原子钟所处的地心距;τ为原子钟原时。
[0020]
所述的引力时延误差其中,ρ
g
和ρ
s
分别为地面测站g 和航天器s到地心的距离,为地面站g到航天器s的距离。
[0021]
本发明还提供实现上述方法的一种基于同频模式的高精度星地双向时间比对系统,包括地面设备和星载设备,所述的地面设备向空间航天器的星载设备发射频点为f1的微波信号,并接收空间航天器星载设备发射的频点为f1的微波信号;所述的星载设备接收地面设备发射的频点为f1的微波信号,并向地面发射频点为f1的微波信号。
[0022]
本发明的有益效果是:目前,北斗系统星载设备搭载氢钟或铷钟与其他同样搭载高精度原子钟的设备之间进行时间同步,传统的微波时间同步方法主要分为单向和双向时间同步方法,其中传统单向时间同步方法的由于其信号单向传播,需利用四颗及以上卫星进行时间同步,故不存在运动运动时延误差(包括空间距离不一致误差和钟差非同时误差),在逐项消除信号单向传播过程中产生的误差后,最终能够实现ns量级的时间同步精度;而传统的双向时间同步方法的双向差分后可抵消一部分误差,但无法精确消除运动时延误差(包括空间距离不一致误差和钟差非同时误差),通常利用广播星历(位置精度m级,速度精度cm/s级)或精密星历(位置精度cm级,速度精度mm/s 级)结合运动时延误差消除模型消除运动时延误差影响,能够达到优于亚ns级的运动时延误差修正精度,最终实现亚ns量级的时间同步精度。传统时间同步方案中精度最高的是应用于北斗星间链路的双向时间同步方案,方案采用单天线单频率(~23ghz,ka频段)时分多址(tdma)模式(星载设备单天线收发信号时间存在一定时隙)进行双向收发信号,通过双向抵消消除部分误差,能够达到亚纳秒量级的双向时间同步精度,随着星上搭载原子钟精度的提高,这些传统方法已经无法满足天基高精度时频评估和应用的需求,本发明提供了一种基于同频模式的高精度星地双向时间比对系统和具体实现方法,在航天器搭载高精度原子钟组(包含冷原子光钟)和具备相应的设备硬件水平的场景下,方案采用双天线单频率(~20ghz
‑
40ghz)同发或同收模式(星载设备发射天线和地面站发射天线在同一钟面时同时发射信号或星载设备接收天线和地面站接收天线在同一钟面时同时接收信号)进行双向收发信号,本发明提出利用星载设备的双根不同天线(两根天线底部距离大于5cm)来接收和发送同一频率的信号,在此基础上再利用本发明提出的适用于双天线的运动时延误差模型结合精密星历(位置精度优于10cm级,速度精度优于1mm/s级)来进一步消除卫星运动引起的运动时延误差(包括空间距离不一致误差和钟差非同时误差),最后再对同个频点的测距信息和其他误差(周期性相对论误差,引力时延误差和设备时延误差)综合处理后,利用本发明提供的同频模式双向时间同步方法,能够实现ps级的星地高精度时间比对需求。
附图说明
[0023]
图1是本发明的基于同频模式的高精度星地双向时间比对系统结构图;
[0024]
图2是本发明的同频模式星载设备安装位置示意图;
[0025]
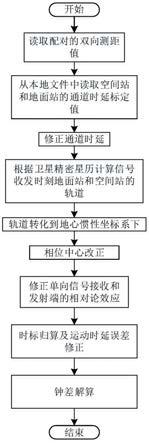
图3是本发明的基于同频模式的高精度双向时间同步方案流程图;
[0026]
图4是本发明的基于同频模式的双向单程测量;
[0027]
图5是本发明的基于同频模式的高精度星地双向时间比对原理图;
[0028]
图6是本发明的基于同频模式的高精度星地双向时间比对中运动时延误差修正方案流程图。
具体实施方式
[0029]
下面结合附图和实施例对本发明进一步说明,本发明包括但不仅限于下述实施例。
[0030]
针对搭载超高精度原子钟组(一般优于1e
‑
16@1day)的空间航天器与地面站的时间比对问题,为了获得更高的时间比对精度,需要更加稳定的测量链路和高精度星地时间比对系统及方法的支撑。本发明的目的在于提出一种基于同频模式的高精度星地双向时间比对系统及方法,通过星载设备特殊的天线设置和采用同一频点收发信号,在无需考虑大气误差的情况下,利用适当的参数输入及合理的误差修正技术,该比对系统及方法能够实现ps级的时间比对精度。
[0031]
本发明所述的一种基于同频模式的高精度星地双向时间比对系统,该系统包括:
[0032]
地面设备。其向空间航天器的星载设备发射频点为f1的微波信号,并接收空间航天器星载设备发射的频点为f1微波信号。
[0033]
星载设备。其接收地面设备发射的频点为f1的微波信号,并向地面发射频点为f1的微波信号。
[0034]
在上述基于同频模式的高精度星地双向时间比对系统中,所述的地面设备包括:
[0035]
产生所述f1频点微波信号的地面微波时频载荷;
[0036]
与所述地面微波时频载荷连接的微波时频传递地面天线,其一方面将所述微波信号发射至空间航天器,另一方面接收从空间航天器上发射的所述不同频段的微波信号;
[0037]
地面数据传输系统,其接收所述微波测距信号下传的伪距观测数据;
[0038]
与所述地面数据传输系统连接的星地时频链路控制中心,其计算得到所述空间航天器钟和地面站钟的相对钟差。
[0039]
在上述基于同频模式的高精度星地双向时间比对系统中,所述星载设备包括:
[0040]
产生所述f1频点微波信号的空间时频载荷;
[0041]
与所述空间微波时频载荷连接的微波时频传递对地天线a,其将所述微波信号发射至地面站;
[0042]
与所述空间微波时频载荷连接的微波时频传递对地天线b,其接收从地面站发射的所述不同频段的微波信号;
[0043]
与所述空间微波时频载荷连接的精密定轨接收机,其接收来自卫星的信号,并进行空间航天器的定轨。
[0044]
空间数据传输系统,其向地面发射所述的微波测距信号下传的观测数据、轨道数据和钟差数据等。
[0045]
本发明所述的一种基于同频模式的高精度星地双向时间比对方法,其特征在于方法步骤如下:
[0046]
步骤1,通过上述时间比对系统的地面设备时频传递天线和空间航天器星载设备的发射天线a和分别向对方发射同一频点的微波测距信号实现地面站和空间航天器之间的
伪距测量,获得f1频点的下行观测伪距和上行观测伪距。
[0047]
步骤2,将步骤1获得的f1频点下行伪距和上行伪距配对组成双向单程测量伪距组合,然后计算获得地面站和空间航天器时频设备之间的星地双向相对钟差。
[0048]
步骤3,计算并扣除双向相对钟差计算时的各项误差,实现星地高精度时间同步;其中,各项误差包括:设备时延误差、运动时延误差(空间距离不对称误差和钟差非同时误差)、周期性相对论效应误差和引力时延误差。
[0049]
本发明的进一步改进在于,步骤1具体包括:
[0050]
在同频模式下的一次测量过程中,通过地面站和空间航天器双方相互发出测距信号供对方测量,然后交换测量数据,进行解算、配对,从而得到双向单程测量伪距组合;
[0051]
其中,双向单程测量伪距组合为地面站和空间航天器相互同时收或发的两个单向测量的组合;
[0052]
本发明的进一步改进在于,由于上下行伪距频点和路径几乎一致,双向时间同步方法可消除大部分的大气时延误差,因此可不做大气时延误差修正。
[0053]
本发明的进一步改进在于,由于精密定轨处理估计的是空间航天器质心位置,使用的空间航天器的精密轨道也为质心轨道,而空间航天器的伪距相位测量距离均为相位中心,因此在数据处理时需对空间站的质心坐标进行相位中心修正,利用提前标定的相位中心结果将精密定轨处理结果分别修正到天线a和b的相位中心坐标值,表达如下:
[0054][0055]
其中,r
s
是空间航天器的质心坐标,r
a
和r
b
分别为空间站对地天线a和b的相位中心位置矢量,f1和f2分别代表空间航天器质心修正到对地天线相位中心a和b转换表达。
[0056]
本发明的进一步改进在于,步骤1中,进行时间比对的双方分别为地面站g和空间航天器s,为降低收发信号的同频干扰,空间航天器s采用不同的微波时频天线a 和b对地收发信号,因此在同频模式下,双向单程测量伪距组合表达为:
[0057][0058]
式(1)中,c为真空光速,t
snd
和t
rcv
分别为发射和接收时刻,和分别为f1频点的下行(ag代表传播路径,星载设备天线a发射信号,地面站g接收信号)测量伪距和f1频点的上行(gb代表传播路径,地面站g发射信号,星载设备天线b接收信号)测量伪距;r
a
和r
b
分别为空间航天器对地天线a和b的相位中心位置矢量,x
s
和x
g
分别为空间航天器和地面站钟差,δ
snd
和δ
rcv
为信号发射通道和接收通道的硬件传输时延,δ
rel
为周期性相对论效应等效时延,δ
of
为相位中心偏移等效时延,δ
g
是引力时延,ε为测距噪声。
[0059]
本发明的进一步改进在于,步骤2中,实现星地双向时间同步的双方分别为地面站g和空间航天器s,由于空间航天器s的上下行信号收发天线相位中心不一致,且信号的空间传输延迟和卫星的高速运动,星地双向伪距测量值中包含了不同时刻的卫星位置与钟差信息,为此需要将双向伪距中包含的时空信息归算至同一时刻t0。假设地面站和空间航天器
之间的钟差为δt,则t0时刻的空间航天器与地面站的相对钟差表达式为:
[0060][0061]
式(2)中,δd为空间距离不一致误差修正量,dx(t,t0)为t时刻到t0时刻的钟差非同时误差修正量。空间距离非对称造成的双向空间距离修正量由空间航天器的精密轨道计算,钟差非同时造成的钟差修正量由空间航天器的预报钟差计算,硬件传输时延定期标定,大气延迟、周期性相对论效应、引力时延以及相位中心偏移可依托数学模型计算。
[0062]
本发明的进一步改进在于,设备时延误差通过精确标定的方法进行补偿。
[0063]
本发明的进一步改进在于,由于空间航天器和地面站之间高速的相对运动导致了上下行信号传播路径和钟差并不一致,因此需对这种运动时延误差进行补偿,补偿方法包括:利用精密星历(航天器位置精度优于10cm,速度精度优于1mm/s)和精密钟差文件,对不同时刻和天线位置的同频双向单程观测伪距进行时标归算和运动时延误差修正,距离补偿和钟差补偿计算分别如下式(3)和(4):
[0064][0065][0066]
本发明的进一步改进在于,对于星载原子钟的相对论效应包括标称频率偏差 (nfo)和周期性相对论效应,其中标称频率偏差可通过在航天器上天前进行提前校准消除,而周期性相对论效应可利用模型消除。由于星地双向时间比对中的周期性相对论效应,不具有路径对称性,必须依赖星历进行补偿,而补偿误差最终将会直接传递到时间比对结果中,因此在考虑ps级时间精度时需充分考虑j2项及更高阶项周期性相对论误差的影响,对于空间航天器和地面站之间的周期性相对论修正模型为:
[0067]
[0068]
其中,w0=6.969290134
×
10
‑
10
·
c2为地球大地水准面上的重力势;gm为地球引力常数;a为空间航天器运行的半长轴;r为地球非球形引力势扰动;r为原子钟所处的地心距;τ为原子钟原时。
[0069]
本发明的进一步改进在于,需消除从空间航天器到地面站接收机的信号传输由于广义相对论效应的作用导致的几何传输时延和引力传输时延。由于地面站和空间航天器坐标系都是地心惯性系(eci),因此可忽略双向几何传输时延的不一致。然而,在皮秒级的时间传递精度下,需要考虑地球中心引力引起的引力时延,修正模型如下:
[0070][0071]
其中,ρ
g
和ρ
s
分别为地面测站g和航天器s到地心的距离,为地面测站g到航天器s的地心的距离,eci下可忽略地球自转效应,但是如果处在地心地固系则需考虑地球自转效应。
[0072]
本发明的进一步改进在于,结合式(2)进行时标归算和各种误差修正后,利用同一参考时刻的双向单程观测数据,可以解算出相对钟差δt。
[0073]
本发明的进一步改进在于,能够实现星地时间同步精度达到ps级。
[0074]
本发明实施例的一种基于同频模式的高精度星地双向时间比对系统,请参阅图1。其中同频模式下星载设备的安装位置请参阅图2。
[0075]
本发明实施例的一种基于同频模式的高精度星地双向时间比对方法,请参阅图3 和图4,主要包含双向单程伪距差分解算钟差和运动时延误差修正,具体包括以下步骤:
[0076]
(1)通过f1频点的微波信号双向单程测量可实现空间航天器与地面站之间的伪距测量请参阅图5,双向单程测量的一次测量过程中,通过空间航天器和地面站双方互发测距信号供对方测量,然后交换测量数据,进行解算,配对,从而得到相对测量值。
[0077]
图5中,需要实现时间同步的双方分别为空间航天器s和地面站g,航天器s的对地天线a在时刻发射频点为f1的微波信号,该信号经过空间航天器s发射设备时延、空间传播时延、其他附加时延,并经过地面站接收设备的设备时延后,最终在地面站g的时刻被检测,得到信号下行伪距观测值同理,地面站g在时刻发射频点为f1的微波信号,空间航天器s的对地天线b在时刻检测到该信号,得到信号上行伪距观测值则一次双向单程伪距观测方程为:
[0078][0079]
其中,c为真空光速,t
snd
和t
rcv
分别为发射和接收时刻,和分别为f1频点的下行测量伪距和f1频点的上行测量伪距;r
a
和r
b
分别为空间站对地天线a和b在地心惯性系中的相位中心位置矢量,x
s
和x
g
分别为空间站和地面站钟差,δ
snd
和δ
rcv
为信号发射通道和接收通道的硬件传输时延,δ
rel
为周期性相对论效应等效时延,δ
of
为相位中心偏移等效时延,
δ
g
是引力时延,ε为测距噪声。
[0080]
(2)利用双向单程观测伪距计算空间航天器与地面站之间的相对钟差
[0081]
将式(1)中双向伪距中包含的时空信息归算至同一时刻t0,然后将归算后的上下行伪距差分可以得到空间航天器和地面站的在t0时刻的相对钟差值δt,计算表达式如下:
[0082][0083]
式中,δd为空间距离不一致修正量,dx(t,t0)为t时刻到t0时刻的钟差非同时修正量。
[0084]
(3)对运动时延误差进行修正
[0085]
为避免同频信号干扰,星载设备的对地发射天线a和对地接收天线b位置之间存在一个固定距离,这将导致信号传播路径和钟差不一致误差的增大,为满足ps级时间同步精度要求,因此需充分考虑运动时延误差的影响。
[0086]
对于运动时延误差的修正,这里利用精密星历(航天器位置精度优于10cm,速度精度优于1mm/s)和精密钟差文件,对不同时刻和天线位置的同频双向单程观测伪距进行时标归算和运动时延误差修正,距离补偿和钟差补偿计算分别如下式(3)和(4),具体流程请参阅图6。
[0087][0088][0089]
(4)扣除各项误差(除运动时延误差),实现超高精度时间同步
[0090]
为了提高时间同步的精度,还需要对公式(2)中包含的各项误差项进行扣除,各项误差的扣除方法分别如下:
[0091]
1)设备时延误差
[0092]
不考虑路径的情况下,设备时延误差仅与设备零值有关。对于已知的两个稳定设备,该值将是一个确定的量,可以通过精确标定来减小或消除其影响。
[0093]
2)相对论效应误差
[0094]
由于空间航天器和地面站之间存在高速的相对运动,星载设备受到广义相对论和狭义相对论的作用导致测距信号在传播过程中存在偏差,因此需要对相对论误差进行补偿。
[0095]
对于标称频率偏差(nfo),可采用提前校准的方法消除。假设星载原子钟的基频为f0,则在发射前将频率调整为f:
[0096][0097]
其中,w0=6.969290134
×
10
‑
10
·
c2为地球大地水准面上的重力势;gm为地球引力常数;a为空间航天器运行的轨道半长轴;r为地球非球形引力势扰动;r为原子钟所处的地心距;τ为原子钟原时。
[0098]
对于周期性相对论效应可采用模型法消除,具体模型如下:
[0099][0100]
通过(2)和(6)可消除双向时间同步过程中的周期性相对论效应误差。
[0101]
3)引力时延
[0102]
在ps级的是时间同步精度下,仅需要考虑地球中心引力引起的引力时延,对这项误差的补偿模型如下:
[0103][0104]
其中,ρ
g
和ρ
s
分别为地面测站g和航天器s到地心的距离,为地面测站g到航天器s的地心的距离,eci下可忽略地球自转效应,但是如果处在地心地固系则需考虑地球自转效应。
[0105]
4)其他误差
[0106]
硬件噪声等其他项误差可采用目前成熟的硬件方案或算法处理即可,不作为发明的重点内容介绍。
[0107]
请参阅图3至图6,本发明实施例中,假定实现时间同步的两方分别为leo卫星和地面站,则以leo卫星和地面站时间的时间同步为例进行说明,在同频模式下,假定二者的上下行信号以同发或同收的体制进行测距,其leo星载设备的发射天线a 和jieshou天线b时间的距离为d cm,则实现星地超高精度时间同步的具体步骤如下:
[0108]
步骤1,leo卫星s在时刻发射频点为f1(~30ghz)的微波信号,该信号经过leo卫星s发射设备时延、空间传播时延、其他附加时延,并经过地面站接收设备的设备时延后,最终在地面站g的时刻被检测,得到地面站g的伪距观测值同理,地面站g在时刻发射频点为f1(~30ghz)的微波信号,leo卫星s在时刻检测到该信号,得到leo卫星s的伪距观测值则leo卫星和地面站各自接收到的伪距观测值表示为:
[0109][0110]
其中,c为真空光速,t
snd
和t
rcv
分别为发射和接收时刻,和分别为f1频点的下行测量伪距和f1频点的上行测量伪距;r
a
和r
b
分别为空间站对地天线a和b在地心惯性系中的相位中心位置矢量,x
s
和x
g
分别为空间站和地面站钟差,δ
snd
和δ
rcv
为信号发射通道和接收通道的硬件传输时延,δ
rel
为周期性相对论效应等效时延,δ
of
为相位中心偏移等效时延,δ
g
是引力时延,ε为测距噪声。
[0111]
步骤2,将上下行观测伪距归算至同一参考时刻的测距值,并进行配对求解
[0112]
利用leo卫星的事后精密星历数据,将不同时刻的伪距观测值换算到同一参考时刻的双向测距值。利用同一时刻的双向测距值就可以重新组成一组新测量方程,表达式如下:
[0113][0114]
步骤3,误差修正
[0115]
利用各项误差扣除方法,运动时延误差、设备时延误差、相对论效应误差、引力时延等误差进行修正和扣除。其中,运动时延误差消除需借助事后精密星历文件和星载设备天线搭载情况构建误差修正模型。
[0116]
步骤4,计算leo和地面站之间的相对钟差δt
[0117]
通过(7)进行差分运算和误差模型修正后,解算得到leo卫星和地面站之间的双向钟差为δt:
[0118][0119]
以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员依然可以对本发明的具体实施方式进
行修改或者等同替换,这些未脱离本发明精神和范围的任何修改或者等同替换,均在申请待批的本发明的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。