1.本发明涉及针对被保持件保持的元件来运算保持件与元件的相对位置以及保持件与元件的相对旋转角度的运算装置等。
背景技术:
2.如下述专利文献所记载的那样,开发了基于拍摄数据来运算元件的位置等的技术。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2000
‑
183404号公报
技术实现要素:
6.发明所要解决的课题
7.本发明的课题在于基于拍摄数据恰当地运算元件的位置等。
8.用于解决课题的技术方案
9.为了解决上述课题,本说明书公开了一种运算装置,基于在至少由第一部件和与所述第一部件不同的第二部件构成的元件被保持件保持时拍摄到的拍摄数据中的所述第一部件的拍摄数据,运算所述保持件与所述元件的相对位置,基于所述第二部件的拍摄数据来运算所述保持件与所述元件的相对旋转角度。
10.另外,为了解决上述课题,本说明书公开了一种输入装置,用于输入如下信息,所述信息表示基于在至少由第一部件和与所述第一部件不同的第二部件构成的元件被保持件保持时拍摄到的拍摄数据中的所述第一部件和所述第二部件中的一方的拍摄数据来运算所述保持件与所述元件的相对位置,并且表示基于所述第一部件和所述第二部件中的另一方的拍摄数据来运算所述保持件与所述元件的相对旋转角度。
11.发明效果
12.根据本公开,基于在至少由第一部件和第二部件构成的元件被保持件保持时拍摄到的拍摄数据中的第一部件的拍摄数据,运算保持件与元件的相对位置,并基于第二部件的拍摄数据,运算保持件与元件的相对旋转角度。由此,能够基于拍摄数据,恰当地运算元件的保持位置以及保持角度。
附图说明
13.图1是表示元件安装机的立体图。
14.图2是表示元件安装机的元件装配装置的立体图。
15.图3是表示控制装置的框图。
16.图4是表示电子元件的侧视图以及俯视图。
17.图5是表示装配时的电子元件的概略图。
18.图6是表示装配时的电子元件的概略图。
19.图7是表示装配时的电子元件的概略图。
20.图8是表示装配时的电子元件的概略图。
21.图9是表示电子元件的俯视图。
22.图10是表示电子元件的俯视图。
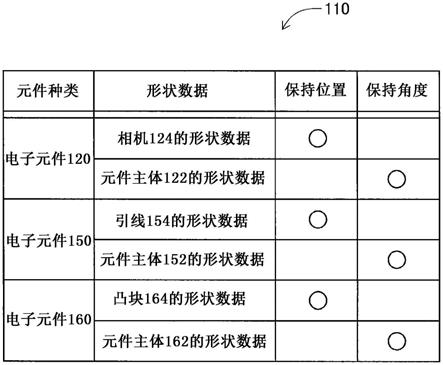
23.图11是表示表格的概念图。
24.图12是表示流程图的图。
具体实施方式
25.以下,作为用于实施本发明的方式,参照附图详细地说明本发明的实施例。
26.在图1中示出元件安装机10。元件安装机10是用于执行元件相对于电路基材12的安装作业的装置。元件安装机10具备装置主体20、基材搬运保持装置22、元件装配装置24、标记相机26、零件相机28、元件供给装置30、散装元件供给装置32、控制装置(参照图3)36。此外,作为电路基材12,列举有电路基板、三维构造的基材等,作为电路基板,列举有印刷布线板、印刷电路板等。
27.装置主体20由框架40和架设于该框架40的梁42构成。基材搬运保持装置22配设在框架40的前后方向上的中央,具有搬运装置50和夹持装置52。搬运装置50是搬运电路基材12的装置,夹持装置52是保持电路基材12的装置。由此,基材搬运保持装置22搬运电路基材12,并且在预定的位置固定地保持电路基材12。此外,在以下的说明中,将电路基材12的搬运方向称为x方向,将与该方向成直角的水平的方向称为y方向,将铅垂方向称为z方向。即,元件安装机10的宽度方向是x方向,前后方向是y方向。
28.元件装配装置24配设在梁42上,具有两台作业头56、58和作业头移动装置62。如图2所示,作业头移动装置62由x方向移动装置63、y方向移动装置64以及z方向移动装置65构成。x方向移动装置63以及y方向移动装置64分别具有电磁马达(参照图3)66、68,通过各电磁马达66、68的工作而使两台作业头56、58一体地向框架40上的任意的位置移动。另外,z方向移动装置65具有电磁马达(参照图3)70、72,通过各电磁马达70、72的工作而使滑动件74、76单独地在上下方向上移动。然后,在该滑动件74、76上可装卸地装配有作业头56、58。由此,作业头56、58通过z方向移动装置65而单独地在上下方向上移动。
29.另外,各作业头56、58具有吸嘴78,吸嘴78经由负压空气通路、正压空气通路而与正负压供给装置(参照图3)80连通。然后,吸嘴78通过负压来吸附保持元件,通过正压使所保持的元件脱离。另外,各作业头56、58具有自转装置(参照图3)82以及升降装置(参照图3)84。自转装置82是使吸嘴78绕轴心自转的装置,变更被吸嘴78保持的元件的姿势。升降装置84是使吸嘴78升降的装置,使被吸嘴78保持的元件升降。
30.另外,标记相机26以朝下的状态安装于滑动件74,与作业头56一起沿x方向、y方向以及z方向移动。由此,标记相机26通过作业头移动装置62的工作而向任意的位置移动,对框架40上的任意的位置进行拍摄。
31.另外,如图1所示,零件相机28以朝上的状态配设在框架40上的基材搬运保持装置22与元件供给装置30之间。由此,保持元件的作业头56、58通过作业头移动装置62的工作而向零件相机28的上方移动,从而零件相机28对被吸嘴78保持的元件进行拍摄。
32.另外,元件供给装置30配设在框架40的前后方向上的一侧的端部。元件供给装置30具有托盘型元件供给装置90和供料器型元件供给装置(参照图3)92。托盘型元件供给装置90是供给载置于托盘上的状态下的元件的装置。供料器型元件供给装置92是通过带式供料器、杆式供料器(省略图示)供给元件的装置。
33.散装元件供给装置32配设在框架40的前后方向上的另一侧的端部。散装元件供给装置32是使分散存在的状态下的多个元件整齐排列并以整齐排列的状态供给元件的装置。即,是使任意的姿势的多个元件整齐排列为预定的姿势并供给预定的姿势的元件的装置。
34.此外,作为由元件供给装置30以及散装元件供给装置32供给的元件,列举有电子电路元件、太阳能电池的构成元件、功率模块的构成元件等。另外,在电子电路元件中存在有具有引线的元件、不具有引线的元件等。
35.如图3所示,控制装置36具备控制器100、多个驱动电路102、图像处理装置106、存储器108。多个驱动电路102与上述搬运装置50、夹持装置52、电磁马达66、68、70、72、正负压供给装置80、自转装置82、升降装置84、托盘型元件供给装置90、供料器型元件供给装置92、散装元件供给装置32连接。控制器100具备cpu、rom、ram等,以计算机为主体,与多个驱动电路102连接。由此,基材搬运保持装置22、元件装配装置24等的工作由控制器100控制。另外,控制器100还与图像处理装置106连接。图像处理装置106对由标记相机26以及零件相机28获得的图像数据进行处理,控制器100从图像数据取得各种信息。进而,控制器100还与存储器108连接。在存储器108中存储有在装配作业时使用的表格(参照图11)110,详细说明见后述,控制器100利用存储于存储器108的表格110来执行安装作业。此外,存储器108与输入装置112连接,通过基于输入装置112的各种信息的输入来生成表格110,所生成的表格110被存储于存储器108。
36.在元件安装机10中,通过上述结构,对被基材搬运保持装置22保持的电路基材12进行元件的装配作业。具体而言,电路基材12被搬运至作业位置,且在该位置被夹持装置52固定地保持。接着,标记相机26向电路基材12的上方移动,对电路基材12进行拍摄。此时,通过标记相机26的拍摄而获得的拍摄数据经由图像处理装置106发送至控制器100,由控制器100来分析拍摄数据。由此,运算与电路基材12的保持位置等相关的信息。
37.另外,元件供给装置30或者散装元件供给装置32在预定的供给位置供给电子元件。然后,作业头56、58中的任一个向元件的供给位置的上方移动,通过吸嘴78来吸附保持元件。接着,保持有元件的作业头56、58向零件相机28的上方移动,通过零件相机28来拍摄被吸嘴78保持的元件。然后,通过零件相机28的拍摄而获得的拍摄数据经由图像处理装置106被发送至控制器100,由控制器100来分析拍摄数据。由此,运算与基于吸嘴78的元件的保持位置等相关的信息。然后,作业头56、58向电路基材12的上方移动,利用电路基材12的保持位置、基于吸嘴78的元件的保持位置等,将电子元件装配于电路基材12。
38.这样,在元件安装机10中,对被吸嘴78保持的元件进行拍摄,利用基于拍摄数据运算出的基于吸嘴78的元件的保持位置等,将电子元件装配于电路基材12。因此,为了提高元件朝向电路基材12的装配精度,需要恰当地运算基于吸嘴78的元件的保持位置等。但是,存在有因元件的形状而无法恰当地运算基于吸嘴78的元件的保持位置等、无法执行高精度的装配作业的隐患。
39.详细而言,例如,图4所示的电子元件120由元件主体122和相机124构成。元件主体
122呈大致长方体形状,在上表面形成有凹部126。凹部126凹陷成圆形状。另外,相机124呈圆柱形状,竖立设置于凹部126的中央部。因此,在电子元件120的俯视图、即从电子元件120的配设有相机124的一侧观察的图中,相机124呈圆形状,进一步而言,呈正圆形状。
40.然后,该电子元件120在元件安装机10中以沿上下方向反转的状态载置于托盘型元件供给装置90的托盘。即,以使相机124朝下的状态载置于托盘。然后,该电子元件120被吸嘴78保持,作业头56、58向零件相机28的上方移动,从而通过零件相机28来拍摄被吸嘴78保持的电子元件120。然后,通过控制器100来分析拍摄数据,从而运算与基于吸嘴78的电子元件120的保持位置等相关的保持信息。
41.此时,例如,能够基于元件主体122的外形线来运算保持信息。具体而言,基于拍摄数据来提取元件主体122的外形线。此外,作为提取元件主体122的外形线时的图像处理,能够采用各种方法。具体而言,例如,利用查找线模板(日本专利第3759983号公报)等,提取元件主体122的外形线。然后,基于元件主体122的外形线来运算预定的坐标、即x方向以及y方向上的坐标。另外,在存储器108中存储有基于吸嘴78的电子元件120的理想的保持位置处的x方向以及y方向上的坐标。由此,以存储于存储器108的理想的保持位置处的x方向以及y方向上的坐标和基于拍摄数据而运算出的元件主体122的x方向以及y方向上的坐标为基础,运算电子元件120与吸嘴78的相对位置。
42.另外,基于元件主体122的外形线,运算被吸嘴78保持的电子元件120的、从基于吸嘴78的电子元件120的理想的保持姿势起的偏移角度。即,基于元件主体122的外形线,运算电子元件120与吸嘴78的相对旋转角度。此外,在电子元件120与吸嘴78的相对旋转角度为0度的情况下,电子元件120被吸嘴78保持为理想的姿势。这样,基于元件主体122的外形线、即元件主体122的拍摄数据,作为保持信息,运算电子元件120与吸嘴78的相对位置以及电子元件120与吸嘴78的相对旋转角度。
43.然后,利用该运算出的电子元件120的位置和旋转角度,通过作业头移动装置62来校正装配时的作业头56、58的x方向以及y方向上的位置,通过自转装置82来校正吸嘴78的旋转角度,从而确保电子元件120的恰当的装配作业。即,例如,在电子元件120的装配预定坐标为(x1,y1)的情况下,如图5所示,电子元件120被装配于装配预定位置。此时,元件主体122和相机124双方配置于装配预定坐标。
44.另外,在电子元件120中,虽然在公差内,但是如图6所示,存在有相机124朝向元件主体122的安装位置偏移的情况。在这样的情况下,若利用基于元件主体122的拍摄数据运算出的电子元件120的位置和旋转角度来执行装配作业,虽然元件主体122配置于装配预定坐标(x1,y1),但是相机124配置于与装配预定坐标(x1,y1)偏移的位置。其理由在于,是基于元件主体122的拍摄数据来运算电子元件120的保持信息、即电子元件120与吸嘴78的相对位置以及旋转角度的。而且,若像这样将相机124配置在与装配预定坐标(x1,y1)偏移的位置,则存在有无法恰当地发挥作为相机124的功能的隐患。即,在装配电子元件120时,期望高精度地装配相机124而不是元件主体122。
45.因此,考虑基于相机124的外形线来运算保持信息的情况。在该情况下,基于拍摄数据来提取相机124的外形线。然后,基于相机124的外形线来运算预定的x方向以及y方向上的坐标。由此,基于存储于存储器108的理想的保持位置处的x方向以及y方向上的坐标和基于拍摄数据而运算出的相机124的x方向以及y方向上的坐标,运算电子元件120与吸嘴78
的相对位置。
46.但是,在从电子元件120的配设有相机124的一侧观察的图中,相机124呈圆形状。即,相机124在从基于零件相机28的拍摄方向观察时呈圆形状。因此,在相机124的外形线中,无法运算电子元件120的旋转角度。即,基于相机124的拍摄数据,作为保持信息,只能运算电子元件120与吸嘴78的相对位置。然后,当利用该保持信息来执行电子元件120的装配作业时,如图7所示,相机124配置在装配预定坐标(x1,y1)。由此,能够恰当地发挥作为相机124的功能。但是,由于不使用基于吸嘴78的电子元件120的旋转角度而执行装配作业,因此元件主体122装配于从装配预定位置130偏移的位置。即,元件主体122以从装配预定位置130绕吸嘴78的轴心旋转的状态被装配。这样,当元件主体122装配于从装配预定位置130偏移的位置时,存在有产生与其它元件的干扰等隐患。
47.为此,在元件安装机10中,不使用元件主体122的拍摄数据而仅基于相机124的拍摄数据来运算电子元件120与吸嘴78的相对位置。另外,不使用相机124的拍摄数据而仅基于元件主体122的拍摄数据来运算电子元件120与吸嘴78的相对旋转角度。即,基于拍摄数据来提取相机124的外形线,基于相机124的外形线来运算预定的x方向以及y方向上的坐标。然后,基于存储于存储器108的理想的保持位置处的x方向以及y方向上的坐标和基于拍摄数据而运算出的相机124的x方向以及y方向上的坐标,运算电子元件120与吸嘴78的相对位置。
48.另外,基于拍摄数据来提取元件主体122的外形线,基于元件主体122的外形线来运算被吸嘴78保持的电子元件120的、从基于吸嘴78的电子元件120的理想的保持姿势起的偏移角度。即,基于元件主体122的外形线来运算电子元件120与吸嘴78的相对旋转角度。然后,利用基于相机124的拍摄数据而运算出的电子元件120的位置,通过作业头移动装置62来校正装配时的作业头56、58的x方向以及y方向上的位置。另外,利用基于元件主体122的拍摄数据而运算出的电子元件120的旋转角度,通过自转装置82来校正吸嘴78的旋转角度。然后,在对作业头56、58的位置以及吸嘴78的旋转角度进行了校正后,将电子元件120装配于电路基材12。由此,如图8所示,相机124配置于装配预定坐标(x1,y1),能够恰当地发挥作为相机124的功能。另外,比较图7和图8可知,元件主体122装配于装配预定位置130,能够防止电子元件120对其它元件的干扰等。即,仅基于构成电子元件120的多个部件中的一个部件的拍摄数据来运算电子元件120的保持位置,仅基于构成电子元件120的多个部件中的一个部件以外的部件的拍摄数据来运算电子元件120的保持角度,从而确保恰当的电子元件120的装配作业。
49.另外,在与电子元件120不同的元件中,也使用与电子元件120相同的方法,运算基于吸嘴78的元件的保持位置以及保持角度,从而确保恰当的元件的装配作业。例如,图9所示的电子元件150由元件主体152和多个引线154构成。元件主体152呈大致长方体形状,以从元件主体152的四个侧面分别延伸出的方式配设有引线154。然后,在电子元件150被吸嘴78保持的状态下,通过零件相机28来进行拍摄,在控制器100中对拍摄数据进行分析。此时,不使用元件主体152的拍摄数据而基于引线154的拍摄数据来运算电子元件150与吸嘴78的相对位置。另外,不使用引线154的拍摄数据而仅基于元件主体152的拍摄数据来运算电子元件150与吸嘴78的相对旋转角度。
50.即,基于拍摄数据来提取多个引线154的外形线,基于引线154的外形线来运算预
定的x方向以及y方向上的坐标。然后,以存储于存储器108的理想的保持位置处的x方向以及y方向上的坐标和基于拍摄数据而运算出的引线154的x方向以及y方向上的坐标为基础,运算电子元件150的保持位置。另外,基于拍摄数据来提取元件主体152的外形线,基于元件主体152的外形线来运算基于吸嘴78的电子元件150的保持角度。然后,利用基于引线154的拍摄数据而运算出的电子元件150的保持位置,通过作业头移动装置62来校正装配时的作业头56、58的x方向以及y方向上的位置。另外,利用基于元件主体152的拍摄数据而运算出的电子元件150的旋转角度,通过自转装置82来校正吸嘴78的旋转角度。然后,在对作业头56、58的位置以及吸嘴78的旋转角度进行了校正后,将电子元件150装配于电路基材12。由此,通过将引线154配置于装配预定坐标而确保了引线154朝向电路基材12的电连接。另外,通过对电子元件150的旋转角度进行校正,能够防止电子元件150对其它元件的干扰等。
51.另外,例如,图10所示的电子元件160由元件主体162和多个凸块164构成。元件主体162呈大致长方体形状,在元件主体162的下表面以排列成3行
×
4列的状态配设有多个凸块164。然后,在电子元件160被吸嘴78保持的状态下,通过零件相机28来进行拍摄,在控制器100中对拍摄数据进行分析。此时,不使用元件主体162的拍摄数据而基于凸块164的拍摄数据来运算电子元件160与吸嘴78的相对位置。另外,不使用凸块164的拍摄数据而基于元件主体162的拍摄数据来运算电子元件160与吸嘴78的相对旋转角度。此外,电子元件160的保持位置以及保持角度的运算方法、装配时的作业头56、58的位置以及吸嘴78的旋转角度的校正方法与电子元件150相同。
52.另外,在元件安装机10中,在运算电子元件120、150、160的保持位置以及保持角度时使用的表格110存储于存储器108。详细而言,作业者在执行装配作业之前,针对各个电子元件120、150、160,将表示基于构成这些电子元件120、150、160的多个部件中的哪一个部件的拍摄数据来运算元件的保持位置的信息以及表示基于构成这些电子元件120、150、160的多个部件中的哪一个部件的拍摄数据来运算元件的保持角度的信息输入到输入装置112。
53.具体地说,作业者针对电子元件120,将表示基于相机124的拍摄数据来运算电子元件120的保持位置、并基于元件主体122的拍摄数据来运算电子元件120的保持角度的信息向输入装置112输入。进而,作业者针对电子元件120,将元件主体122以及相机124的形状数据也向输入装置112输入。元件主体122的形状数据例如是元件主体122的宽度方向以及长度方向上的尺寸、公差等,相机124的形状数据是相机124的外径、公差等。另外,作业者针对电子元件150,将表示基于引线154的拍摄数据来运算电子元件150的保持位置、并基于元件主体152的拍摄数据来运算电子元件150的保持角度的信息向输入装置112输入。进而,作业者针对电子元件150,将元件主体152以及引线154的形状数据也向输入装置112输入。元件主体152的形状数据例如是元件主体152的宽度方向以及长度方向上的尺寸、公差等,引线154的形状数据是引线的根数、配设间距、长度尺寸、宽度尺寸、公差等。另外,作业者针对电子元件160,将表示基于凸块164的拍摄数据来运算电子元件160的保持位置、并基于元件主体162的拍摄数据来运算电子元件160的保持角度的信息向输入装置112输入。进而,作业者针对电子元件160,将元件主体162以及凸块164的形状数据也向输入装置112输入。元件主体162的形状数据例如是元件主体162的宽度方向以及长度方向上的尺寸、公差等,凸块164的形状数据是凸块的数量、配设间距、外径、公差等。
54.基于这样输入的信息,生成图11所示的表格110,该表格110被存储于存储器108。
在表格110中,针对电子元件120,设定有表示利用相机124的形状数据来运算电子元件120的保持位置、利用元件主体122的形状数据来运算电子元件120的保持角度的信息。另外,在表格110中,针对电子元件150,设定有表示利用引线154的形状数据来运算电子元件150的保持位置、利用元件主体152的形状数据来运算电子元件150的保持角度的信息。进而,在表格110中,针对电子元件160,设定有表示利用凸块164的形状数据来运算电子元件160的保持位置、利用元件主体162的形状数据来运算电子元件160的保持角度的信息。
55.然后,在控制器100中,通过执行图12所示的流程图,利用存储于存储器108的表格110,运算与电子元件相应的保持位置以及保持角度。详细而言,首先,执行各种数据的初始化(s100)。接着,基于为了运算保持位置而使用的形状数据,确定构成电子元件的部件的外形线(以下,记载为“保持位置用外形线”)(s102)。即,在装配作业的对象是电子元件120的情况下,通过表格110来确定用于运算元件的保持位置的形状数据是相机124的形状数据。然后,控制器100从拍摄数据中提取与相机124的形状数据相应的外形线。由此,提取相机124的外形线。另外,在装配作业的对象是电子元件150的情况下,通过表格110来确定用于运算元件的保持位置的形状数据是引线154的形状数据。然后,控制器100从拍摄数据中提取与引线154的形状数据相应的外形线。由此,从拍摄数据中提取引线154的外形线。另外,在装配作业的对象是电子元件160的情况下,通过表格110来确定用于运算元件的保持位置的形状数据是凸块164的形状数据。然后,控制器100从拍摄数据中提取与凸块164的形状数据相应的外形线。由此,从拍摄数据提取凸块164的外形线。这样,基于为了运算保持位置而使用的形状数据,确定保持位置用外形线。
56.接着,基于为了运算保持角度而使用的形状数据,确定构成电子元件的部件的外形线(以下,记载为“保持角度用外形线”)(s104)。即,在装配作业的对象是电子元件120的情况下,通过表格110来确定用于运算元件的保持角度的形状数据是元件主体122的形状数据。然后,控制器100从拍摄数据中提取与元件主体122的形状数据相应的外形线。由此,从拍摄数据提取元件主体122的外形线。另外,在装配作业的对象是电子元件150的情况下,通过表格110来确定用于运算元件的保持角度的形状数据是元件主体152的形状数据。然后,控制器100从拍摄数据中提取与元件主体152的形状数据相应的外形线。由此,从拍摄数据提取元件主体152的外形线。另外,在装配作业的对象是电子元件160的情况下,通过表格110来确定用于运算元件的保持角度的形状数据是元件主体162的形状数据。然后,控制器100从拍摄数据中提取与元件主体162的形状数据相应的外形线。由此,从拍摄数据提取元件主体162的外形线。这样,基于为了运算保持角度而使用的形状数据,确定保持角度用外形线。
57.然后,基于保持位置用外形线以及保持角度用外形线,运算基于吸嘴78的元件的保持位置以及保持角度(s106)。然后,将运算出的基于吸嘴78的元件的保持位置以及保持角度设定为在装配作业时使用的保持信息(s108)。由此,如上所述,能够确保电子元件120、150、160的恰当的装配作业。另外,也基于在s102以及s104中确定的保持位置用外形线以及保持角度用外形线进行检查处理(s110)。
58.在该检查处理中,基于位置用外形线以及保持角度用外形线、即元件主体122、152、162、相机124、引线154、凸块164的外形线,检查这些元件主体122、152、162、相机124、引线154、凸块164的尺寸等是否超过公差。即,如上所述,在元件主体122、152、162等的形状
数据中也包含公差。因此,能够判定所确定的元件主体122、152、162等的外形线是否超过公差。为此,在该检查处理中,在元件主体122、152、162等的外形线超过公差的情况下,判断为ng(不合格)元件,在元件主体122、152、162等的外形线未超过公差的情况下,判断为ok(合格)元件。然后,废弃ng元件,仅将ok元件用于装配作业。这样,通过执行图12所示的流程图而利用存储于存储器108的表格110来运算与电子元件相应的保持位置以及保持角度。另外,还判断装配对象的元件是ok元件还是ng元件。
59.此外,控制装置36是运算装置的一个例子。吸嘴78是保持件的一个例子。存储器108是存储器的示例。表格110是部件信息的一个例子。输入装置112是输入装置的一个例子。电子元件120是元件的一个例子。元件主体122是第二部件的一个例子。相机124是第一部件的一个例子。电子元件150是元件的一个例子。元件主体152是第二部件的一个例子。引线154是第一部件的一个例子。电子元件160是元件的一个例子。元件主体162是第二部件的一个例子。凸块164是第一部件的一个例子。
60.此外,本发明并不局限于上述实施例,能够以基于本领域技术人员的知识而实施了各种变更、改良的各种方式来实施。具体而言,例如,在上述实施例中,基于元件主体122、152、162来运算元件的保持角度,但是也可以基于元件主体122、152、162来运算元件的保持位置。另外,基于引线154、凸块164来运算元件的保持位置,但是也可以基于引线154、凸块164来运算元件的保持角度。
61.另外,除了元件主体122、152、162、相机124、引线154、凸块164以外,也可以基于各种部件等来运算元件的保持位置或者保持角度。例如,也可以基于元件主体122的一部分的形状、具体而言凹部126的形状等来运算元件的保持位置等。
62.另外,在上述实施例中,在运算元件的保持角度时,不使用相机124的拍摄数据而使用元件主体122的拍摄数据。其理由在于,如上所述,从拍摄方向观察时相机124呈圆形状,进一步而言,呈正圆形状。即,若使用从拍摄方向观察时呈圆形状、进一步而言呈正圆形状以外的形状的部件的拍摄数据,则能够运算元件的保持角度。因此,基于从拍摄方向观察时呈多边形、椭圆等具有方向性的形状的部件的拍摄数据,能够运算元件的保持角度。
63.另外,在上述实施例中,将本发明应用于电子元件,但是并不局限于电子元件,能够将本发明应用于各种元件。具体而言,例如,能够将本发明应用于不具有电气要素的元件、组装元件等。
64.附图标记说明
65.36:控制装置(运算装置)78:吸嘴(保持件)108:存储器110:表格(元件信息)112:输入装置120:电子元件(元件)122:元件主体(第二部件)124:相机(第一部件)150:电子元件(元件)152:元件主体(第二部件)154:引线(第一部件)160:电子元件(元件)162:元件主体(第二部件)164:凸块(第一部件)
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

