1.本发明涉及汽车制造技术领域,尤其涉及一种新能源汽车电池智能装配随行小车。
背景技术:
2.随着石油资源的减少和大气环境严重污染,新能源汽车的发展成为了汽车工业发展的必然趋势,国内外各大汽车厂商纷纷调整公司战略导向,极速扩张并在国内上线布局,传统汽车产业已跟不上大时代发展步伐。
3.目前,汽车底盘电池装配过程中,车身抱具悬挂输送至电池待装拧紧区时,汽车主线停止,等待电池安装,导致电池装配不能随行,造成产线停顿和浪费。
技术实现要素:
4.本发明的目的在于设计一种新能源汽车电池智能装配随行小车,有效突破电池随动安装、误差自适应实时补偿等技术瓶颈,突破常规,实现新能源汽车在不停线状态下电池的全自动安装,形成车身抱具悬挂输送,车身总装、机器人随行装配小车等于一体的作业平台。
5.为达到上述目的,本发明的技术方案是:
6.一种新能源汽车电池智能装配随行小车,包括:轨道;柔性行走小车,设置于所述轨道上;其包括:基座,为一框架结构,其下部中央设可行走于所述轨道的凹槽结构;两根y向滑轨及其上y向滑块,两根y向滑轨分别设置于所述基座框架上端面两侧,与所述轨道垂直布置;y向活动基板,其底面连接于所述y向滑块上端面;y向活动基板的前部中央设凹槽,该凹槽两侧分别竖直设置一y向挡块;y向活动基板的中央设y向安装通孔,该y向安装通孔对应所述轨道轴向两侧的y向活动基板顶面分别设一x向挡块;y向调节气缸,其由两个并列设置、作用方向相反的第一气缸组成,其缸体固定于所述基座框架结构的前部中央,且,位于所述y向活动基板前部中央的凹槽内,第一气缸的活塞杆端部分别对应所述凹槽两侧的两个y向挡块;两根x向滑轨及其上x向滑块,两x向滑轨平行设置于所述y向活动基板上端面的两侧,并与所述轨道平行布置;x向活动基板,其底面连接于所述x向滑块上端面;x向活动基板的中央对应所述y向安装通孔设x向安装通孔;x向活动基板的四个角部分别设置一万向滚珠,且x向活动基板顶面的一对角线位置设置一对导孔及其上导套;x向活动基板顶面对应x向的两侧中央分别凸设一滚动轴承;x向调节气缸,其由两个并列设置、作用方向相反的第二气缸组成,位于所述x向活动基板中央的x向安装通孔内,x向调节气缸缸体固定于x向安装通孔两侧的x向活动基板,第二气缸的活塞杆端部分别对应所述y向活动基板顶面两侧的两个x向挡块;浮动平台,平行设置于所述x向活动基板上方,浮动平台底面四角对应所述x向活动基板四个角部的万向滚珠分别设一限位块,该限位块底面中部设与该万向滚珠配合的限位凹槽;所述浮动平台对应x向的两侧中央分别设一可套设于所述x向活动基板顶面滚动轴承的腰形孔;所述浮动平台的一对角线位置对应所述x向活动基板顶面成对角线
设置的两导孔设置一对第一导向孔及其内导向套;所述浮动平台的另一对角线位置设置一对第二导向孔;两个z向调节组件,分别设置于所述浮动平台及x向活动基板成对角线设置的第一导向孔和导孔处,所述z向调节组件包括:z向调节气缸,其缸体分别竖直设置于所述x向活动基板底面成对角线设置的两导孔处,其活塞杆自导孔伸出;z向调节件,其由一z向调节块及竖直其底面中央的杆体组成;z向调节块底面为圆锥面,所述杆体下端穿过浮动平台的第一导向孔与自x向活动基板导孔伸出z向调节气缸活塞杆端部连接;z向调节块底面的圆锥面与所述浮动平台的第一导向孔配合,与所述浮动平台对应x向的两侧中央的腰形孔与所述x向活动基板顶面滚动轴承配合,同步实现绕z向回转浮动调节;两调节连接件,该调节连接件为t形结构,包括圆盘及固定于其底面中央的连杆;连杆下部穿过所述浮动平台上成对角设置的第二导向孔,并连接于所述x向活动基板顶面;圆盘底面沿周向设若干万向滚珠,万向滚珠接触所述x向活动基板顶面;编码器,设置于所述x向活动基板一侧边;编码尺,对应所述编码器,设置于所述y向活动基板一侧边,实现x向实时位置跟随检测及反馈;抱具定位机构,包括至少两抱具定位组件,相对设置于所述浮动平台顶面的两侧,所述抱具定位组件包括:固定立柱,竖直设置于所述浮动平台顶面;第一、第二升降滑轨及其上滑块,两升降滑轨分别设置于所述固定立柱上部相对的两个侧面;安装板,设置于所述第一升降滑轨的滑块;挡板,设置于所述第二升降滑轨的滑块,并由一连接板连接所述安装板;第一升降气缸,其缸体固定于所述固定立柱一侧面下部,其活塞杆端部连接所述连接板;夹紧气缸,其缸体固定于所述安装板上,其活塞杆向上;第一夹紧块,设置于第一升降滑轨的滑块上,所述夹紧气缸的活塞杆端部连接该第一夹紧块;第二夹紧块,设置于所述挡板上部与第一夹紧块相对的内侧面;第三夹紧块,其一端连接于所述挡板上部的侧面,另一端位于固定立柱侧面;缓冲器,设置于所述连接板的内侧面;缓冲止挡块,设置于所述缓冲器上方的固定立柱侧面上;接近开关,设置于所述缓冲止挡块一侧的固定立柱侧面上;至少一台拧紧机器人,其为带拧紧枪的六轴机器人,设置于所述浮动平台顶面;2d视觉智能相机,通过支架设置于所述浮动平台对应x向一侧中央的上方;3d视觉智能相机,设置于所述拧紧机器人上;控制器,所述x向调节气缸、y向调节气缸、z向调节气缸、编码器、夹紧气缸、拧紧机器人、接近开关、2d视觉智能相机、3d视觉智能相机均连接所述控制器。
7.进一步,还包括一车身定位固定组件,其包括:第三升降滑轨及其上滑块,设置于所述固定立柱上部、相对设置所述缓冲止挡块的固定立柱另一侧面;安装座,设置于所述第三升降滑轨上的滑块;第二升降气缸,其缸体设置于所述第三升降滑轨下方的固定立柱侧面的下部,其活塞杆端部连接所述安装座;定位气缸,其缸体固定于所述安装座,活塞杆竖直向上;固定销,设置于所述定位气缸的活塞杆端部;膨胀套,套设于所述固定销上。
8.优选的,所述的基座外还设一围栏及护板。
9.优选的,所述轨道为七轴地轨。
10.优选的,所述拧紧机器人设两台或四台,对称设置于所述浮动平台顶面两侧。
11.在本发明所述新能源汽车电池智能装配随行小车中:
12.柔性行走小车可实现对车身抱具的实时误差补偿,x方向、y方向柔性浮动及xy平面的柔性角度浮动,小车同时配备随行编码尺,可实现小车基座框架与浮动平台保持一定的相对位置,而当小车随行结束后返回时更能实现浮动平台自复位归零功能。
13.抱具定位机构可检测到车身抱具到位信号,且可弥补抱具在沿线体方向行走时z
方向的正负柔性误差补偿。
14.拧紧机器人通过六轴机器人、2d/3d视觉智能相机及拧紧枪配合,2d视觉智能相机首先对车身进行扫描,对车身进行粗定位,再由拧紧机器人带动3d视觉智能相机对电池上螺栓进行扫描得到精准偏差值并传给机器人,六轴机器人则在2d/3d视觉智能相机引导下,带动拧紧枪到达准确的螺栓位置,进行电池安装螺栓的最终拧紧。
15.在整个工作过程中,车身抱具为一直行走状态,而柔性行走小车则在七轴地轨上随着抱具一起运动。
16.本发明与现有技术相比所具有的优点或积极效果:
17.本发明新能源汽车电池柔性随行装配小车,实现了真正意义的全自动随行装配,其柔性浮动平台技术突破,解决了小车在运动过程中带来的误差问题。
18.本发明采用误差自适应实时补偿技术,实现车身抱具x、y向角度柔性浮动及z向正负补偿,突破常规,实现新能源汽车在不停线状态下电池的全自动安装,大大提高了生产效率,符合现代精准生产管理及汽车生态链降低成本的发展理念。
19.本发明摒弃传统人工装配,实现电池智能化、自动化装配,降低人工成本,加大生产效率;打造新能源汽车电池全新装配方式,使汽车在不停线状态下实现电池自动装配。
20.本发明可以满足不同规格型号汽车底盘电池装配,实现汽车底盘电池装配不停线,确保电池装配与主线随行。
附图说明
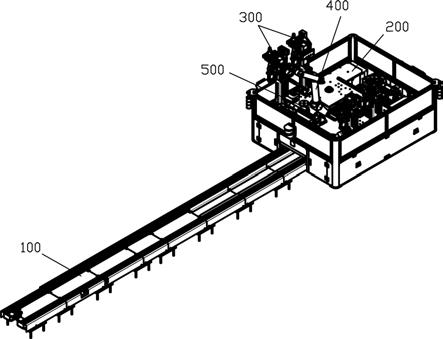
21.图1为本发明实施例的立体图;
22.图2为本发明实施例中柔性行走小车的立体图;
23.图3为本发明实施例中柔性行走小车(去除围栏)的立体图;
24.图4为本发明实施例中柔性行走小车(去除围栏)的立体分解图1;
25.图5为本发明实施例中柔性行走小车(去除围栏)的立体分解图2;
26.图6为本发明实施例中柔性行走小车(去除围栏)的立体分解图3;
27.图7为本发明实施例中抱具定位机构的立体图1;
28.图8为本发明实施例中抱具定位机构的立体图2;
29.图9为本发明实施例中拧紧机器人的立体图。
具体实施方式
30.参见图1~图9,本发明所述的新能源汽车电池智能装配随行小车,其包括:
31.轨道100;
32.柔性行走小车200,设置于所述轨道100上;其包括:
33.基座1,为一框架结构,其下部中央设可行走于所述轨道100的凹槽结构101;
34.两根y向滑轨2、2’及其上y向滑块,两根y向滑轨2、2’分别设置于所述基座1框架上端面两侧,与所述轨道100垂直布置;
35.y向活动基板3,其底面连接于所述y向滑块2、2’上端面;y向活动基板3的前部中央设凹槽31,该凹槽31两侧分别竖直设置一y向挡块32、32’;y向活动基板3的中央设y向安装通孔33,该y向安装通孔33对应所述轨道100轴向两侧的y向活动基板31顶面分别设一x向挡
块34、34’;
36.y向调节气缸4,其由两个并列设置、作用方向相反的第一气缸41、42组成,其缸体固定于所述基座1框架结构的前部中央,且,位于所述y向活动基板3前部中央的凹槽31内,第一气缸41、42的活塞杆端部分别对应所述凹槽31两侧的两个y向挡块32、32’;
37.两根x向滑轨5、5’及其上x向滑块,两x向滑轨5、5’平行设置于所述y向活动基板3上端面的两侧,并与所述轨道100平行布置;
38.x向活动基板6,其底面连接于所述x向滑块上端面;x向活动基板6的中央对应所述y向安装通孔33设x向安装通孔61;x向活动基板6的四个角部分别设置一万向滚珠62、62’,且x向活动基板6顶面的一对角线位置设置一对导孔63、63’及其上导套;x向活动基板6顶面对应x向的两侧中央分别凸设一滚动轴承64、64’;
39.x向调节气缸7,其由两个并列设置、作用方向相反的第二气缸71、72组成,位于所述x向活动基板6中央的x向安装通孔61内,x向调节气缸7缸体固定于x向安装通孔61两侧的x向活动基板6,第二气缸71、72的活塞杆端部分别对应所述y向活动基板3顶面两侧的两个x向挡块34、34’;
40.浮动平台8,平行设置于所述x向活动基板6上方,浮动平台8底面四角对应所述x向活动基板6四个角部的万向滚珠62、62’分别设一限位块81、81’,该限位块81、81’底面中部设与该万向滚珠62、62’配合的限位凹槽;所述浮动平台8对应x向的两侧中央分别设一可套设于所述x向活动基板6顶面滚动轴承64、64’的腰形孔82、82’;所述浮动平台8的一对角线位置对应所述x向活动基板6顶面成对角线设置的两导孔63、63’设置一对第一导向孔83、83’及其内导向套;所述浮动平台8的另一对角线位置设置一对第二导向孔84、84’;
41.两个z向调节组件9、9’,分别设置于所述浮动平台8及x向活动基板6成对角线设置的第一导向孔83、83’和导孔63、63’处,所述z向调节组件9(以z向调节组件9为例,下同)包括:
42.z向调节气缸91,其缸体分别竖直设置于所述x向活动基板6底面成对角线设置的两导孔63处,其活塞杆自导孔63伸出;
43.z向调节件92,其由一z向调节块921及竖直其底面中央的杆体922组成;z向调节块921底面为圆锥面,所述杆体922下端穿过浮动平台8的第一导向孔83与自x向活动基板6导孔63伸出z向调节气缸92活塞杆端部连接;z向调节块92底面的圆锥面与所述浮动平台8的第一导向孔83配合,与所述浮动平台8对应x向的两侧中央的腰形孔82与所述x向活动基板6顶面滚动轴承64配合同步实现绕z向回转浮动调节;
44.两调节连接件93、93’,该调节连接件93(以调节连接件93为例,下同)为t形结构,包括圆盘931及固定于其底面中央的连杆932;连杆932下部穿过所述浮动平台8上成对角设置的第二导向孔84,并连接于所述x向活动基板6顶面;圆盘931底面沿周向设若干万向滚珠933,万向滚珠933接触所述x向活动基板6顶面;
45.编码器10,设置于所述x向活动基板6一侧边;
46.编码尺11,对应所述编码器10,设置于所述y向活动基板3一侧边;
47.抱具定位机构300,包括至少两抱具定位组件12、12’,相对设置于所述浮动平台8顶面的两侧,所述抱具定位组件12(以抱具定位组件12为例,下同)包括:
48.固定立柱121,竖直设置于所述浮动平台8顶面;
49.第一、第二升降滑轨122、122’及其上滑块,两升降滑轨122、122’分别设置于所述固定立柱上121部相对的两个侧面;
50.安装板123,设置于所述第一升降滑轨122的滑块;
51.挡板124,设置于所述第二升降滑轨122’的滑块,并由一连接板125连接所述安装板123;
52.第一升降气缸126,其缸体固定于所述固定立柱121一侧面下部,其活塞杆端部连接所述连接板125;
53.夹紧气缸127,其缸体固定于所述安装板123上,其活塞杆向上;
54.第一夹紧块128,设置于第一升降滑轨122的滑块上,所述夹紧气缸127的活塞杆端部连接该第一夹紧块128;
55.第二夹紧块128’,设置于所述挡板124上部与第一夹紧块128相对的内侧面;
56.第三夹紧块128”,其一端连接于所述挡板124上部的侧面,另一端位于固定立柱121侧面;
57.缓冲器129,设置于所述连接板125的内侧面;
58.缓冲止挡块1291,设置于所述缓冲器129上方的固定立柱121侧面上;
59.接近开关1292,设置于所述缓冲止挡块1291一侧的固定立柱121侧面上;
60.至少一台拧紧机器人400,其为带拧紧枪401的六轴机器人,设置于所述浮动平台8顶面;
61.2d视觉检测智能相机500,通过支架设置于所述浮动平台8对应x向一侧中央的上方;
62.3d视觉检测智能相机600,设置于所述拧紧机器人400上;
63.控制器(图中未示),所述x向调节气缸、y向调节气缸、z向调节气缸、编码器、夹紧气缸、拧紧机器人、接近开关、2d视觉智能相机、3d视觉智能相机均连接所述控制器。
64.进一步,还包括一车身定位固定组件13,其包括:
65.第三升降滑轨131及其上滑块,设置于所述固定立柱121上部、相对设置所述缓冲止挡块1291的固定立柱121另一侧面;
66.安装座132,设置于所述第三升降滑轨131上的滑块;
67.第二升降气缸133,其缸体设置于所述第三升降滑轨131下方的固定立柱121侧面的下部,其活塞杆端部连接所述安装座132;
68.定位气缸134,其缸体固定于所述安装座132,活塞杆竖直向上;
69.固定销135,设置于所述定位气缸134的活塞杆端部;
70.膨胀套136,套设于所述固定销135上;
71.所述第一、第二升降气缸和定位气缸连接所述控制器。
72.优选的,所述的基座1外还设一围栏及护板14。
73.优选的,所述轨道100为七轴地轨。
74.优选的,所述拧紧机器人400设两台或四台,对称设置于所述浮动平台8顶面两侧。
75.本发明所述新能源汽车电池智能装配随行小车的工作过程:
76.抱具定位机构检测到车身抱具到位后,夹紧气缸夹紧抱具,同时柔性行走小车浮动平台对车身抱具自适应实时误差补偿,保证柔性行走小车在随行过程中与车身抱具保持
相对静止的状态;
77.2d视觉智能相机拍摄车身部分特征,计算出电池xy初位置,并将偏移量给到机器人,拧紧机器人根据2d视觉智能相机偏移量,调整螺栓3d扫描位置;
78.3d视觉智能相机扫描完成后,将计算出的位置偏移信息发送给机器人,同时拧紧机器人带动拧紧枪运动到拧紧位置对螺栓进行最终拧紧;
79.所有螺栓拧紧完成后,随行定位机构缩回,脱离与车身抱具的定位,同时柔性行走小车的浮动平台自复位,柔性行走小车运动到七轴地轨始端等待下辆车循环。
80.本发明打造车身抱具悬挂输送,车身总装、机器人随行装配小车等于一体的作业平台,扩大汽车装配空间利用,减少浪费,追寻汽车底部电池装配柔性化,增进汽车产业链的空间匹配,确保汽车底部装配可持续同步协同。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。