1.本发明涉工业机器人遥控领域,尤其涉及一种基于控制工业机械设备的多功能遥控器。
背景技术:
2.随着社会的发展,在一些资源开发领域、城市建设领域,以及一些重型机械控制领域等等,人类触及到的危险也越来越多,如工业建筑、采矿、港口装卸码头、仓储、机械制造、化工、造纸、工程机械等重工业领域,其中不可预料的危险数不甚数,对工人们的人生安全造成了极大威胁,因此,使用遥控器实现各危险场景下的远程作业,是目前重工业领域的重要发展方向,如操控起重机、重型车、采矿机械起吊机等大型重工业机械,这对于一些环境恶劣、危险系数高、生物不能靠近的场所非常适用。而目前,大多数远程操控设备都是一个控制操控台,如需要人类指挥的工业机器人,会对其配制一个控制操作台,这种控制操作台一般固定安装在某一个位置,或者体型大,较为笨重,不便于随身携带或移动,限制了操作地点,进一步限制了工人的活动范围。
技术实现要素:
3.本发明的目的在于根据目前重工业领域的发展需要,提供一种基于控制工业机械设备的多功能遥控器,该遥控器带有触摸显示屏,以及若干附有控制功能的操作开关,基于软件和硬件配合遥控,在不减少控制功能的条件下,缩小了远程操控设备的体积,实现工人在远距离的安全区域内操控各种重工业机械,且遥控器便于携带,进一步增加工人的活动范围,本技术方案中的工业机械设备主要指工业机器人。
4.具体通过以下技术方案实现:一种基于控制工业机械设备的多功能遥控器,包括顶部敞口设置的外壳,其特征在于:还包括基于软件操作控制的触摸显示屏和基于硬件操作控制的三位摇头开关,所述外壳内部设置有控制电路模块,以及分别与控制电路模块电性连接的供电电源和用于实现信号无线传输的lora模块,所述外壳顶部敞口的位置设置有用于布置所述触摸显示屏和所述三位摇头开关的控制面板;所述触摸显示屏和若干所述三位摇头开关穿设于控制面板上,并分别与控制电路模块电性连接;所述控制面板上还穿设有分别与控制电路模块电性连接的用于实现控制电路模块通/断电的电源开关和用于控制工业机械设备紧急停止的急停开关,以及用于控制工业机械设备移动速度和方向的万向无极摇杆。
5.外壳:为外壳内部的电路组成结构(包括控制电路模块、lora模块和供电电源)提供了良好的布局空间,同时还对该电路组成结构起到了很好的保护作用,为遥控器能拥有较高防护等级打下基础;操作面板:操作面板为所有操作部件(包括电源开关、急停开关、触摸显示屏、万向无极摇杆、三位摇头开关等)提供了良好的布局空间,可为各操作部件之间的预留足够的间隔距离,各功能部件的排列摆放位置可根据实际操作逻辑来确定;
供电电源:为整个控制电路模块提供稳定且可靠电源;控制电路模块:控制电路模块作为遥控器的核心控制部件,包含了控制芯片(包括对应的微处理器和相关单片机,如8086微处理器和555单片机)等实现控制面板上各功能部件使用功能的电路组成结构,可根据对不同机器人的功能控制,设计出控制电路模块中不同的电路组成机构,进一步赋予控制面板上各操作部件的相关控制功能;lora模块:是一种基于lpwan的远距离无线扩频通信模块,支持lorawan标准协议,串口数据透传双向通讯,用于实现遥控器的远距离信号传输,如型号为zhc0561和zhc0661的低频(470~510mhz)半双工无线数传终端,内嵌高速低功耗单片机和高性能射频芯片,采用最新lora扩频调制技术,提供rs485、开关量、模拟量等多种通讯接口,具有功耗低、距离远、传输速度快、接收灵敏度高、抗干扰能力强、使用简单方便等优点;电源开关:主要用于接通和断开供电电源和控制电路模块;电源开关是遥控器电源控制的开关,按下电源开关,表示对遥控器进行供电显示及操作使能;急停开关:即“紧急停止按钮”,业内简称急停按钮;顾名思义急停按钮就是当发生紧急情况的时候,用户可以通过快速按下此按钮来达到保护的措施;本技术方案中,当发生紧急情况的时候,便可通过按下急停开关,使机器人停止一切动作,进一步达到保护的措施,即按下急停开关后,控制电路模块中的微控制器形成对应的控制命令,对机器人进行紧急停止控制,用于避免机器人发生碰撞,以及预防机器人出现不可测的故障。
6.触摸显示屏:用于显示机器人的各项工作数据以及控制面板上的其他操作部件的状态信息,便于实时监控遥控器自身的各项控制数据以及机器人的各项工作数据,进一步实现用户对机器人各项信息的实时掌控,触摸显示屏还兼备着对机械设备的软件控制功能,可通过在控制电路模块中输入相应的控制程序,进一步拓展触摸显示屏的控制功能,即可在不增加遥控器硬件设施(遥控器的重量和体积)的条件下,实现遥控器控制功能的扩展,如拓展触摸显示屏的视屏显示功能,进一步实现对施工现场的远距离观察。
7.万向无极摇杆:用于控制机械设备的动作方向,具备开关量信号控制和模拟量调速控制;即万向无极摇杆具备x轴y轴两个坐标基准值,二维度平面值,呈线性变化调节,不同角度不同比例式输出执行,如在x轴正负方向推动时,可实现机械设备的一个部位动作,且速度随着推动幅度变大而变大,y轴正负方向推动时,可实现机械设备的另一个动作,且随着杆子推动幅度变大而速度加大,如在x轴y轴夹角推动,则可实现机器人两个动作机构的同步联动,45度角推动时实现x轴和y轴同比例变化,其他情况同理;三位摇头开关:主要用于控制机械设备的日常工作,若干个三位摇头开关相互配合,实现遥控器对机器人的多功能控制,三位摇头开关的控制功能是由控制电路模块赋予的,如移动方向、移动速度、旋转角度等等。
8.所述控制电路模块包括带有控制芯片的核心控制板,以及用于拓展触摸显示屏功能的功能控制板,功能控制板中含有实现触摸显示屏功能拓展的单片机,触摸显示屏通过功能控制板与核心控制板电性连接,所述电源开关、急停开关、万向无极摇杆以及所述三位摇头开关分别电性接入所述核心控制板。
9.所述控制面板上还穿设有遥控器的下坠自锁/解锁按钮,以及用于启动工业机械设备的启动按钮,且下坠自锁/解锁按钮和启动开关分别与所述核心控制板电性连接;即核心控制板中设置了坠落自锁模块,坠落自锁模块中含有重力传感器,基于重力传感器的工
作原理,即采用弹性敏感元件制成悬臂式位移器,与采用弹性敏感元件制成的储能弹簧来驱动电触点,完成从重力变化到电信号的转换,进一步使微处理器构成对应的控制信号发送至工业机械设备中,实现遥控器在下坠时,将对机械设备的控制状态锁定在当前状态,同时对遥控器自身进行自锁,避免遥控器在与地面接触的瞬间造成误操作,通过按动下坠自锁/解锁按钮,经微处理器识别后,遥控器自身解锁,对应发出控制信号,可以实现对机械设备解锁解锁。所述三位摇头开关上套设有防尘密封套,防尘密封套包括套柱和套座,套座从上到下褶皱设置,用于为三位摇头开关提供伸展空间,套柱设置于套座上。
10.所述供电电源为可拆卸的充电电池,所述外壳上设置有电池安装槽以及与电池安装槽对应的电池盖板,充电电池设置于电池安装槽中。充电电池可以反复电使用,相较于一次性电池,充电电池有较长寿命,避免经常更换电池对环境资源造成负担,符合现阶段工业发展的环保需求。
11.所述控制面板上设置有用于防止触摸显示屏从控制面板上脱落的的保护框架,保护框架上设置有防止触摸显示屏被刮的透明保护屏,另外,透明保护屏还对触摸显示屏起到了防尘、防水、防碎屏等多重保护作用。
12.所述操作面板上根据各操作部件的位置布局,对应设置有若干限位孔,控制面板上包括触摸显示屏、电源开关、急停开关、万向无极摇杆以及所述三位摇头开关的操作部件,分别通过对应的限位孔设置于控制面板上,限位孔使各操作部件之间保持距离,限位孔中设置有橡胶密封圈,用于防止水和尘土进入外壳内部的同时,固定对应的操作部件,确保遥控器结构的稳定性,进一步提升遥控器的防护等级。
13.所述外壳的棱角处圆滑设置,分散遥控器摔落时,外壳的受力,外壳与所述控制面板通过螺钉连接,且所述控制面板边缘设置有密封圈,进一步增加遥控器的防护等级。
14.所述外壳两侧还设置有条状把手,且条状把手上设置有防滑橡胶,条状把手是根据工人操作遥控器时,手握把手的状态而设计的,符合人体工学设计,便于操控遥控器。
15.本技术方案带来的有益效果:1)本技术方案利用外壳为电路控制电路模块、电源控制模块以及lora模块提供具有有效保护作用的布置空间,且外壳边角圆滑设计,不仅可防止工人在操作过程中受伤,还可在遥控器掉落时,分散地面对外壳产生的碰撞力,提高了外壳的防摔能力,进一步提高了遥控器的防摔等级;2)本技术方案采用军工级调制技术的lora模块作为遥控器的无线传输模块,且模块利用5g技术对信号进行发送和接收。与普通无线传输模块相比,其拥有超远距离、高带宽、快速响应、灵敏度高、传输速度快等优点;3)本技术方案中,利用触摸显示屏显示机器人的各项工作数据以及处于控制面板上的其他功能部件的状态信息,便于实时监控遥控器自身的各项控制数据以及机器人的各项工作数据,进一步实现用户对机器人各项信息的实时掌控,触摸显示屏兼设对机械设备软件控制功能,可实现在不增加遥控器硬件设施(遥控器的重量和体积)的条件下,拓展遥控器控制功能;4)本技术方案中,控制面板为各操作部件提供足够的布置空间,通过设置限位孔使各操作部件之间保持距离,并在壳体两边设置带有防滑橡胶的把手,符合人体工学设计,方便
操作的同时也防止误操作;5)本技术方案采用充电电池,可以反复电使用,相较于一次性电池,充电电池有较长寿命,避免经常更换电池对环境资源造成负担,符合现阶段工业发展的环保需求;6)本技术方案中,通过在限位孔中设置橡胶密封圈,在控制面板边缘设置密封圈,以及在控制面板上设置带有透明保护屏的保护框架,对遥控器施加防护措施,进一步提高了遥控器的防护等级。
16.7)本技术方案中,遥控器还设置了下坠自锁功能,实现遥控器在下坠时,将对机械设备的控制状态锁定在当前状态,同时对遥控器自身进行自锁,可避免遥控器在与地面接触的瞬间造成误操作。
附图说明
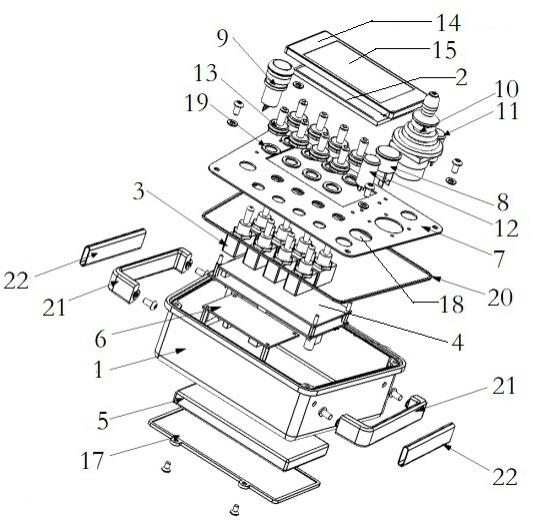
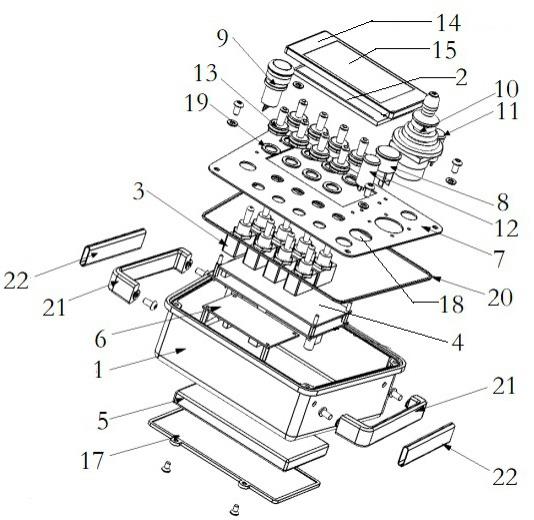
17.本发明的前述和下文具体描述在结合以下附图阅读时变得更清楚,其中:图1为本发明的结构拆分示意图;图2为本发明的整体结构示意图;图3为本发明壳体内部结构示意图;图4为本发明底部结构示意图;图中:1、外壳;2、触摸显示屏;3、三位摇头开关;4、控制电路模块;4.1、核心控制板;4.2、功能控制板;5、供电电源;6、lora模块;7、控制面板;8、电源开关;9、急停开关;10、万向无极摇杆;11、下坠自锁/解锁按钮;12、启动按钮;13、防尘密封套;13.1、套柱;13.2、套座;14、保护框架;15、透明保护屏;16、电池安装槽;17、电池盖板;18、限位孔;19、橡胶密封圈;20、密封圈;21、条状把手;22、防滑橡胶。
具体实施方式
18.下面通过几个具体的实施例来进一步说明实现本发明目的技术方案,需要说明的是,本发明要求保护的技术方案包括但不限于以下实施例。
19.实施例1本实施例公开了一种基于控制工业机械设备的多功能遥控器,作为本发明一种基本的实施方案,包括顶部敞口设置的外壳1,还包括基于软件操作控制的触摸显示屏2和基于硬件操作控制的三位摇头开关3,外壳1内部设置有控制电路模块4,以及分别与控制电路模块4电性连接的供电电源5和用于实现信号无线传输的lora模块6,外壳1顶部敞口的位置设置有用于布置触摸显示屏2和三位摇头开关3的控制面板7;触摸显示屏2和若干三位摇头开关3穿设于控制面板7上,并分别与控制电路模块4电性连接;控制面板7上还穿设有分别与控制电路模块4电性连接的用于实现控制电路模块4通/断电的电源开关8和用于控制工业机械设备紧急停止的急停开关9,以及用于控制工业机械设备移动方向和速度的万向无极摇杆10。
20.本技术方案中,采用控制面板7为各功能部件提供布置空间,限制各功能部件之间的间隔距离,各功能部件的排列摆放位置可根据实际操作逻辑来确定,控制机器人日常工作的功能部件采用凸出设置的三位摇头开关3和万向无极摇杆10,使工人操作起来顺手的
同时避免误操作,利用外壳1将控制电路模块4、供电电源5以及数传电台模块进行集中保护,并为其三者提供良好的布置条件;另外在紧急情况下,可以按下急停开关9,停止机械设备的一切动作,最大限度的避免造成安全事故的发生;触摸显示屏2实现对机器人工作状态的实时掌控,并可对机械设备进行软件操作控制,且可根据需要拓展触摸显示屏2的功能,如可使触摸显示屏2具有视屏显示功能,通过在机械设备上安装摄像头,在机械设备的角度对施工现场进行远距离观察,还可通过视屏显示功能对机器人的动作进行更加精细的控制,避免出现操作错误。本技术方案采用lora模块6作为遥控器的无线传输模块,如lora无线数传电台,采用军工级lora调制技术,由于其先进的调制方式,大大的提升了通信距离与稳定性,内置了功率放大器(pa)与低噪声放大器(lna),使得其在最大发射功率达到1w的同时接收灵敏度也十分可观,区别于模拟调频电台,无线数传电台利用5g技术进行发射纯数字信号,拥有超远程、高带宽、响应速度快、传输速度快等。且本无线数传电台内部采用crc校验,来对数据传输的可靠性进行保证,提供透明rs232/rs485接口,波特率范围为1200bps~115200bps,传输频段采用水利水电、交通专用的233mhz, 穿透性强、通讯距离远,空旷地带最远可达8km,实现了工人们对工业机器人的远距离操控,减少了工人在工业施工现场的涉险操作,进一步为工人的人生安全提供了保障。
21.实施例2本实施例公开了一种基于控制工业机械设备的多功能遥控器,作为本发明一种基本的实施方案,即实施例1中,控制电路模块4包括带有控制芯片的核心控制板4.1,以及用于拓展触摸显示屏2功能的功能控制板4.2,触摸显示屏2通过功能控制板4.2与核心控制板4.1电性连接,电源开关8、急停开关9、万向无极摇杆10以及三位摇头开关3分别电性接入所述核心控制板4.1;控制面板7上还穿设有遥控器的下坠自锁/解锁按钮11,以及用于启动工业机械设备的启动按钮12,且下坠自锁/解锁按钮11和启动开关分别与所述核心控制板4.1电性连接;供电电源5为可拆卸的充电电池,所述外壳1上设置有电池安装槽16以及与电池安装槽16对应的电池盖板17,充电电池设置于电池安装槽16中;所述外壳1两侧还设置有条状把手21,且条状把手21上设置有防滑橡胶22。
22.本技术方案中,供电电源5通过电源开关8为控制电路模块4通电后,按下启动按钮12,启动控制电路模块4中包括控制芯片的逻辑控制载体部件中的应用程序,同时发送对应的控制信号至工业机械设备启动,工业机械设备初始状态只使能了接收模块,其余模块未使能,这是为了机器人安全的一种机制,按下启动按钮12,机器人其余模块方才被使能。在某些需要机械设备暂停工作的情况下,按下暂停按钮,机器人的动作停止在按下控制按钮的那一刻,再次按下暂停按钮,使暂停按钮弹起复原,机器人继续暂停之前的动作,实现在操作机器人的过程中,就算遇到特殊情况,也不打乱机械设备的工作周期,使机器人的工作状态更加精准;遥控器还带有摔落自锁功能,即利用重力传感器和接触器相互配合,实现遥控器在下坠时,将对机械设备的控制状态锁定在下坠的过程中,避免遥控器在与地面接触的瞬间造成误操作,通过按动下坠自锁/解锁按钮11,可以实现遥控器解锁;控制电路模块4中专门设置了核心控制板4.1和功能控制板4.2,将控制电路模块4分区域化,不仅方便维护检修,而且功能控制板4.2单独设置为一个板块,方便对触摸显示屏2的功能拓展;充电电池可以反复电使用,相较于一次性电池,充电电池有较长寿命,避免经常更换电池对环境资源造成负担,符合现阶段工业发展的环保需求,且可多个充电电池替换使用,电池充电和遥控
器使用互不干涉;外壳1两侧设置带有防滑橡胶22的条状把手21把手,符合人体工学设计,不用移动手的核心位置,便可操作控制面板7上的所有功能部件,进一步使不同男、女都能轻松驾驭遥控器。
23.实施例3本实施例公开了一种基于闭环控制的恒定力加载方法,作为本发明一种优选的实施方案,即实施例1或2中,控制面板7上设置有用于防止触摸显示屏2从控制面板7上脱落的的保护框架14,保护框架14上设置有防止触摸显示屏2被刮的透明保护屏15;控制面板7上对应设置有若干限位孔18,控制面板7上包括触摸显示屏2、电源开关8、急停开关9、万向无极摇杆10以及所述三位摇头开关3的操作部件,分别通过对应的限位孔18设置于控制面板7上,限位孔18中设置有橡胶密封圈19,用于防止水和尘土进入外壳1内部的同时,固定对应的操作部件;;三位摇头开关3上套设有防尘密封套13,防尘密封套13包括套柱13.1和套座13.2,套座13.2从上到下褶皱设置,用于为三位摇头开关3提供伸展空间,套柱13.1设置于套座13.2上外壳1的棱角处圆滑设置,外壳1与所述控制面板7通过螺钉连接,且所述控制面板7边缘设置有密封圈20。
24.本技术方案中,通过在限位孔18中设置橡胶密封圈19,在控制面板7边缘设置密封圈20,以及在控制面板7上设置带有透明保护屏15的保护框架14,对遥控器施加防护措施,进一步提高了遥控器的防护等级,其中,透明保护屏15对触摸显示屏2起到了防尘、防水、防碎屏等多重防护作用,且外壳1的边角处圆滑设置,外壳1与控制面板7通过螺钉连接,进一步增加了遥控器的防护等级。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。