技术特征:
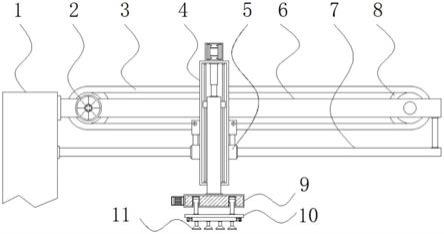
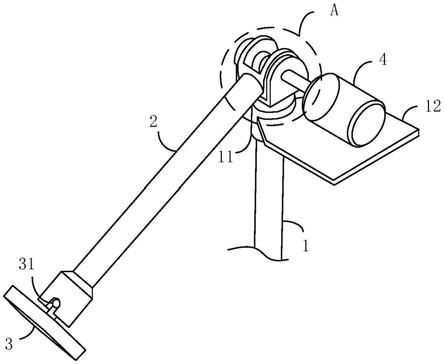
1.一种用于模块塑料盖子生产的智能取物料机械手,包括机座(1)和固定板(6),其特征在于:所述机座(1)的一侧设置有固定板(6),所述固定板(6)一端的两侧设置有两组滚轴(8),所述滚轴(8)之间设置有履带(3),所述滚轴(8)的一端固定连接有驱动电机(2),所述机座(1)的一侧固定连接有固定杆(7),所述履带(3)和固定杆(7)之间设置有套块(5),所述套块(5)的下方设置有吸取底座(10),所述吸取底座(10)的上方设置有翻转机构(9),所述吸取底座(10)的下方设置有吸取机构(11),所述套块(5)的一端设置有调节机构;所述调节机构包括固定框(4),所述固定框(4)固定连接在套块(5)的一端,所述固定框(4)的顶端固定连接有气缸(16),所述气缸(16)的输出端固定连接有伸缩杆(15),所述伸缩杆(15)的底端固定连接有调节杆(14),所述调节杆(14)的两侧固定连接有两组滑套(13),所述固定框(4)的内部固定连接有两组限位杆(12)。2.根据权利要求1所述的一种用于模块塑料盖子生产的智能取物料机械手,其特征在于:所述限位杆(12)设置有两组并关于固定框(4)的垂直中心线呈对称分布。3.根据权利要求1所述的一种用于模块塑料盖子生产的智能取物料机械手,其特征在于:所述翻转机构(9)由伺服电机(901)、罩壳(902)、限位槽(903)、转轴(904)和连接杆(905)组成,所述罩壳(902)固定连接在调节杆(14)的底端,所述罩壳(902)的一侧固定连接有伺服电机(901),所述伺服电机(901)的输出端通过联轴器固定连接有转轴(904),所述罩壳(902)的两端设置有四组限位槽(903),所述转轴(904)的底端固定连接有两组连接杆(905)。4.根据权利要求3所述的一种用于模块塑料盖子生产的智能取物料机械手,其特征在于:所述连接杆(905)外部的宽度小于限位槽(903)内部的宽度,所述连接杆(905)嵌在限位槽(903)的内部。5.根据权利要求1所述的一种用于模块塑料盖子生产的智能取物料机械手,其特征在于:所述吸取机构(11)由固定槽(1101)、螺栓(1102)、卡块(1103)、吸盘(1104)和通气底板(1105)组成,所述通气底板(1105)设置在吸取底座(10)的底端,所述通气底板(1105)的底端设置有十二组吸盘(1104),所述通气底板(1105)的两侧固定连接有两组卡块(1103),所述吸取底座(10)底端的两侧固定连接有两组固定槽(1101),所述固定槽(1101)和卡块(1103)之间设置有三组螺栓(1102)。6.根据权利要求5所述的一种用于模块塑料盖子生产的智能取物料机械手,其特征在于:所述固定槽(1101)呈“凹”字形,所述卡块(1103)呈“工”字形,所述卡块(1103)嵌在固定槽(1101)的内部并与固定槽(1101)呈滑动连接。7.根据权利要求5所述的一种用于模块塑料盖子生产的智能取物料机械手,其特征在于:所述吸盘(1104)设置有十二组,所述吸盘(1104)在通气底板(1105)的底端呈等间距分布。
技术总结
本实用新型公开了一种用于模块塑料盖子生产的智能取物料机械手,包括机座和固定板,所述机座的一侧设置有固定板。该用于模块塑料盖子生产的智能取物料机械手通过设置有伺服电机、罩壳、限位槽、转轴和连接杆,机械手移动到模具中间将塑料瓶盖取出时需要翻转机械手的吸盘使吸盘吸附瓶盖,但是传统机械手的翻转机构稳定性较差,为了提高翻转的稳定性可以在机械手的底端设置罩壳,罩壳外部的伺服电机带动内部的转轴进行旋转翻转,罩壳外部的限位槽可以对转轴底端的连接杆进行限位,转轴在翻转的过程中限位槽限制了翻转的范围同时也提高了翻转的稳定性,减少翻转过度出现的异常情况,该机构提高机械手的翻转稳定性。该机构提高机械手的翻转稳定性。该机构提高机械手的翻转稳定性。
技术研发人员:赵飘飘 曾珍华 朱啟兵
受保护的技术使用者:苏州艾讯精密五金配件有限公司
技术研发日:2021.04.29
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。