1.本实用新型属于人工电磁材料技术领域,尤其涉及一种基本单元、超表面。
背景技术:
2.新型人工电磁表面,又名超表面,可通过设计其单元特性以及空间排布,控制电磁波的幅度、相位、极化、波束、轨道角动量等参数,实现电磁能量的偏折、聚焦、吸波等功能,可用于天线、成像等领域。通过引入可调技术,可以设计出能够实时控制电磁波各参数的可调超表面。传统可调超表面的控制信号都是静态的,或者以非常低的频率在改变,因此是一个线性器件,只能对电磁波的一些线性特征进行调控,如幅度、相位、极化等。而信息超表面通过高速动态改变编码超表面的控制信号,在时间维度上提供了额外的自由度,使其在不需要使用非线性材料的前提下成为了一个非线性器件,进而可以产生一系列谐波分量。因此,信息超表面在通信、隐身和成像领域具有潜在应用价值。
技术实现要素:
3.实用新型目的:本实用新型所要解决的技术问题在于,提供一种基本单元、超表面,该超表面能够在对照射信息超表面的电磁波的入射角度进行实时、快速估计的同时对其进行独立调控。
4.实用新型技术方案为:本实用新型提出一种基本单元,该基本单元包括上表面结构、介质基板与下表面结构,所述上表面结构包括第一金属条带与金属矩形贴片,所述第一金属条带和金属矩形贴片通过开关二极管连接,第一金属条带与金属矩形贴片平行排列于介质基板的上表面,并且,第一金属条带与介质基板上表面的两条边垂直连接;下表面结构为第二金属条带,位于介质基本的下表面,方向上正交于上表面的第一金属条带方向,所述第二金属条带与介质基板下表面的两条边垂直连接;单元上表面的金属矩形贴片与下表面的第二金属条带通过金属通孔相连;每个基本单元的开关二极管由外部电路控制,呈现不同的电磁响应;基本单元的电磁响应状态根据空间编码序列在空间维度上排列分布,或根据时间编码序列在时间维度上周期循环。
5.一种基本单元构建的信息超表面,该信息超表面由上述基本单元周期排列而成,共n列基本单元,同一列单元的第一金属条带相互连接,共享外部控制信号,由同一组时间编码序列控制,具有相同的电磁响应,并且同一行单元的第二金属条带相互连接。
6.本实用新型还提出一种根据所述信息超表面对到达角估计的方法,该方法包括如下步骤:
7.(1)确定超表面各列单元反射系数的时间编码序列及其周期,并通过傅里叶变换计算出各列单元反射波中各阶谐波分量的幅度与相位;
8.(2)根据各列单元的时间编码序列组成时空编码矩阵,并计算出各阶谐波对应的远场方向图;
9.(3)从步骤(1)中谐波幅相结果中选取m阶非零谐波分量,其中,m≥n,再根据步骤
(2)所得谐波远场方向图计算对应谐波在θ=0
°
处的幅度相位值,将这些谐波幅相结果与步骤(2)中所用的计算公式联立成线性方程组并得到其系数矩阵;
10.(4)通过矩阵求逆得到步骤(3)中系数矩阵的广义逆矩阵,利用矩阵行列变换计算得出入射电磁波入射角度的估计值θ
e
。
11.进一步的,步骤(1)的具体方法如下:超表面共包含n列单元,每列单元的反射系数由相应的时间编码序列控制,其中,第p列单元的周期时变反射系数在一个周期内的具体表达式γ
p
(t)为下列形式:
[0012][0013]
其中,t为时变反射系数周期,为时移的基本脉冲函数,具体定义为:
[0014][0015]
其中,为一个具有特定幅度相位的复数,代表在长度为l的时间编码序列中第l位编码;
[0016]
当入射电磁波频率为f
c
时,经超表面第p列单元反射后的电磁波被调制,变化为以入射波频率为中心,反射系数周期倒数f0=1/t为谐波频率间隔的混频信号,其频域表达式为其中,δ(f
‑
kf0‑
f
c
)表示频移为kf0‑
f
c
的冲激函数,而则代表第p列单元的反射波中第k阶谐波kf0 f
c
的复数系数,对式(1)进行傅里叶变换理论计算得到,具体表示为:
[0017][0018]
其中,j为虚数单位,π为圆周率,为标准采样函数,代表幅度为1,相位为的自然指数函数,根据公式(3),计算出经过单元调制后电磁波第k阶谐波kf0 f
c
对应的幅度与相位。
[0019]
进一步的,步骤(2)的具体方法如下:对于一个具有n列单元的信息超表面,共有n个长度为l的时间编码序列,组成一个维度为n
×
l的时空编码矩阵,当电磁波从与超表面法线方向呈θ
i
的方向入射时,其远场方向图的时域表达式f(θ,t)为:
[0020][0021]
其中,e
p
(θ)=cosθ为基本单元的散射方向图函数,θ定义为观察方向与超表面法线间的夹角,λ
c
为入射波在自由空间中的波长,经过傅里叶变换,第k阶谐波的远场方向图为:
[0022][0023]
其中,λ
k
为谐波波长,d为每列单元的间距,通过式(5),即可分别计算出某一时空编码矩阵下信息超表面各阶谐波的方向图。
[0024]
进一步的,步骤(3)的具体方法如下:根据式(3),可得超表面各列单元反射系数中各阶谐波幅相的计算结果,从中选取m阶非零谐波分量依次写为k1,k2,
…
,k
m
,根据式(5),得到超表面θ=0
°
处反射波频谱中第k阶谐波分量为:
[0025][0026]
此时,分别将所选谐波带入式(6),得到相应结果联立成线性方程组,并写成矩阵形式:
[0027][0028]
式(7)进一步写为:
[0029][0030]
其中,为谐波列向量,长度为m,为谐波系数矩阵,为入射波角度列向量,长度为n。
[0031]
进一步的,步骤(4)的具体方法如下:由式(7)可知,a为m
×
n的二维矩阵,假设其具有广义逆矩阵,维度为n
×
m,记为a
‑1,则可得到入射波角度列向量为:
[0032][0033]
式(7)可知,实际上为一等比数列,其公比值可根据式(9)右边相邻项相比得到:
[0034][0035]
其中,为列向量第n行元素,根据上式,可以得到入射波角度为:
[0036][0037]
其中,sin
‑1(
·
为反正弦函数,angle(
·
)为取复数相位操作,上式对入射波角度θ
i
共进行了n
‑
1次计算,每次结果记为将n
‑
1次的计算结果取其均值作为最终的入射角度估计值:
[0038][0039]
本实用新型还提出一种计算机处理设备,该计算机处理设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述的信息超表面对到达角估计的方法的步骤。
[0040]
本实用新型还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被所述处理器执行时实现上述的信息超表面对到达角估计的方法的步骤。
[0041]
有益效果:与现有技术相比,本实用新型的技术方案具有以下有益技术效果:
[0042]
(1)本实用新型所涉及的达到角估计方法原理简单,只需要对超表面反射波进行频谱分析即可估计出电磁波入射方向;
[0043]
(2)与传统达到角估计方法相比,不需要额外的传感器以及复杂的信号处理系统,本实用新型具有成本低廉,结果快速准确等优点;
[0044]
(3)本实用新型在进行达到角估计的同时,还可以对电磁波进行独立调控,将两个不同系统功能完美集成,且互不影响,具有高度集成,快速响应等特点,可以用于设计制造对不同入射角度电磁波呈现不同调控功能的只能系统。
附图说明
[0045]
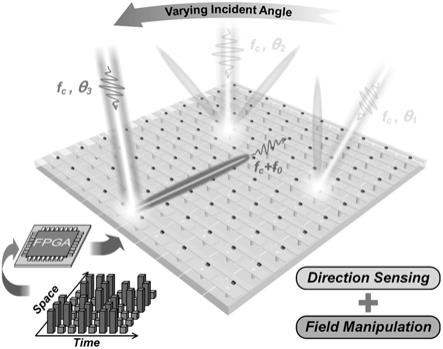
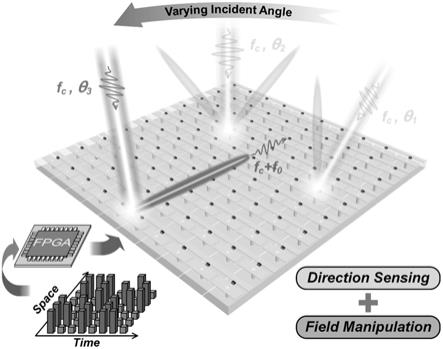
图1为本实用新型信息超表面同时估计达到角与调控电磁波的示意图。
[0046]
图2为本实用新型所设计的信息超表面单元结构的典型实施例其中(a)为本实用新型所设计的信息超表面单元上表面结构示意,(b)本实用新型所设计的信息超表面单元下表面结构示意,(c)为本实用新型所设计的信息超表面单元的反射幅度/相位随控制电压变化仿真结果图,(d)为本实用新型所述信息超表面单元构成的信息超表面示意图。
[0047]
图3(a)为本实用新型所设计的时空编码矩阵,其中编码
‘0’
代表单元反射系数相位为0
°
,编码
‘1’
代表单元反射系数相位为180
°
。
[0048]
图3(b)为入射角度θ
i
=45
°
时,经本实用新型所用超表面反射后的电磁波在法线方向频谱分布的计算结果。
[0049]
图3(c)为入射角度θ
i
=45
°
时,经本实用新型所用超表面反射后的电磁波各阶谐波远场散射方向图的计算结果。
[0050]
图4(a)为本实用新型实验验证过程中,当入射角度θ
i
=45
°
时,在超表面法线方向接收到的频谱数据,其中圆点代表用于对比的计算结果。
[0051]
图4(b)为本实用新型实验验证过程中,当入射角度θ
i
=45
°
时,反射波 1阶谐波的远场散射方向图,其中实线/虚线分别代表实测/计算结果。
[0052]
图4(c)、(d)分别为本实用新型实验验证过程中,不同入射角度情况下所估计出的达到角θ
e
以及其与实际值的绝对误差,测量范围为[
‑
90
°
,90
°
],测量间隔为3
°
。
具体实施方式
[0053]
如图1所示为一种基于信息超表面的到达角估计与电磁调控集成方法,该方法可以通过信息超表面对入射电磁波进行时域
‑
空域
‑
频域联合调控的同时对其到达角进行快
速、精准估计。
[0054]
信息超表面由同一基本单元周期排列而成,并通过馈电网络将多个基本单元组成阵列,类似平面反射阵,其单元反射系数可通过外部电压控制信号被实时调控。
[0055]
本实用新型所使用基本单元1结构如图2所示,共分为三层:上表面结构(如图2a)、介质基板与下表面结构(如图2b)。其中上表面结构由金属条带11与矩形贴片12组成,中间跨接开关二极管13;中间介质基板材质为tly
‑
5,介电常数2.2,厚度1.59mm;下表面结构为整面金属背板14。此外,单元上层矩形贴片与下层背板通过金属通孔相连15。
[0056]
图2中所示的基本单元1的各项几何尺寸为:单元1整体长和宽均为5mm、厚度为 1.59mm,金属条11带宽为1mm,矩形贴片12长为1.7mm、宽为1.7mm,通孔15位于矩形贴片中心;通过偏置电压改变开关二极管13的工作状态,可以对基本单元的反射特性进行调控,其仿真结果图如图2(c)所示。从中可以看出,基本单元在 23ghz~25ghz内,反射幅度十分稳定,损耗低于1db,而相位响应则具有180
°
的相位差。
[0057]
进一步,如图2d所述,将基本单元1周期性排列,即可以构成信息超表面2,其中上述单元1构成按列控制的阵列形式,通过偏置馈电线21对每列的单元1及其开关二极管13实现电压或电流控制。
[0058]
本实用新型基于信息超表面对电磁波同时进行时域
‑
空域
‑
频域联合调控与到达角估计的具体方法如下:
[0059]
(1)确定超表面各列单元反射系数的时间编码序列及其周期,并通过傅里叶变换计算出各列单元反射波中各阶谐波分量的幅度与相位;
[0060]
本实用新型基本原理在于利用周期时变反射系数对入射电磁波频谱进行调控。超表面共包含n列单元,每列单元的反射系数由相应的时间编码序列控制,其中,第p列单元的周期时变反射系数在一个周期内的具体表达式γ
p
(t)为下列形式:
[0061][0062]
其中,t为周期,为时移的基本脉冲函数,具体定义为:
[0063][0064]
其中,为一个具有特定幅度相位的复数,代表在长度为l的时间编码序列中第l位编码。上述公式体现了时间编码序列对单元反射系数的控制方式,因此,只需用一段时间编码序列就可以表征基本单元的周期时变反射系数。
[0065]
当入射电磁波频率为f
c
时,经超表面单元反射后的电磁波便会被调制,变化为以入射波频率为中心,反射系数周期倒数f0=1/t为谐波频率间隔的混频信号=1/t为谐波频率间隔的混频信号其中,e
r
(f)代表反射波的频域表达式,δ(f
‑
kf0‑
f
c
)表示频移为kf0‑
f
c
的冲激函数,而则代表第k阶谐波kf0 f
c
的复数系数,可对式(1)进行傅里叶变换理论计算得到,具体表示为:
[0066]
[0067]
其中,j为虚数单位,π为圆周率,为标准采样函数,代表幅度为1,相位为的自然指数函数。根据公式(3),便计算出经过单元调制后电磁波第k阶谐波kf0 f
c
对应的幅度与相位。
[0068]
(2)根据各列单元的时间编码序列组成时空编码矩阵,并计算出各阶谐波对应的远场方向图。
[0069]
对于一个具有n列单元的信息超表面,共有n个长度为l的不同的时间编码序列γ
p
(t),可组成一个n
×
l的时空编码矩阵。当电磁波从超表面角度θ
i
的方向入射时,其远场方向图的时域表达式f(θ,t)可写为:
[0070][0071]
其中e
p
(θ)=cosθ为基本单元近似的散射方向图函数,θ定义为与超表面法线间的夹角,λ
c
为入射波在自由空间中的波长。经过傅里叶变换,第k阶谐波的远场方向图为:
[0072][0073]
λ
k
为谐波波长,d为单元间距,通过式(5),即可分别计算出某一时空编码矩阵下信息超表面各阶谐波的方向图,完成对入射电磁波的时域
‑
空域
‑
频域联合调控。
[0074]
(3)从步骤(1)中谐波幅相结果中选取m阶(m≥n)非零谐波分量,其中n代表超表面单元列数量,再根据步骤(2)所得谐波远场方向图计算对应谐波在θ=0
°
处的幅度相位值,最终联立成线性方程组并得到其系数矩阵。
[0075]
根据式(5),可以得到超表面θ=0
°
处(发现防线)反射波频谱中第k阶谐波分量为:
[0076][0077]
此时,根据计算结果选取m阶(m≥n)非零谐波分量,依次写为k1,k2,
…
,k
m
,分别计算谐波分量后联立成矩阵形式:
[0078][0079]
简便起见,式(7)可进一步写为:
[0080][0081]
其中为谐波列向量,长度为m,a为谐波系数矩阵,
为入射波角度列向量,长度为n。
[0082]
(4)通过矩阵求逆得到步骤(3)中系数矩阵的广义逆矩阵,最终利用矩阵行列变换计算得出入射电磁波角度的估计值θ
e
。
[0083]
由式(7)可知,a为m
×
n的二维矩阵。假设其具有广义逆矩阵,维度为n
×
m,记为a
‑1,则可得到入射波角度列向量为:
[0084][0085]
式(7)可知实际上为一等比数列,其公比值可根据式(9)右边相邻项相比得到:
[0086][0087]
其中为列向量第n行元素。根据上式,可以得到入射波角度为:
[0088][0089]
其中,sin
‑1(
·
为反正弦函数,angle(
·
)为取复数相位操作。上式对入射波角度θ
i
共进行了n
‑
1次计算,每次结果记为理论上,n
‑
1次的计算结果应该均一致,但考虑到测量误差,取其均值作为最终的入射角度估计值:
[0090][0091]
(5)根据超表面单元反射系数与控制信号之间的映射关系设计出相应的控制信号,设计相应程序进行到达角估计所需的数据处理,并搭建相应的信号控制、采集与处理平台。
[0092]
不同形式、结构的信息超表面,其单元反射系数与控制信号的映射关系不尽相同。因此,需要根据实际情况,将步骤(2)计算所得超表面所需的时空编码矩阵映射为对应的控制信号,交由专门的控制平台进行生成并加载至超表面对应单元上。此外,基于步骤(3)、(4)的到达角估计方法,需要相应的信号采集与数据处理平台,对经超表面反射后的电磁波信号在远场法线方向(θ=0
°
)进行采集与频谱分析,并提取所选谐波分量的幅度相位进行数据处理以得出到达角的估计值。最终,当加载上控制信号时,一旦超表面被(f
c
,θ
i
)的电磁波波激励,就可以在对其进行电磁调控的同时估计出其入射方向。
[0093]
为了展示本实用新型所提出的技术方案,根据图2所示信息材料基本单元及其超表面典型实施例,加工了一块信息超表面作为实验验证样件。该超表面共包含10
×
10个基本单元,每一列单元可由同一控制信号操控,实际应用的用于改变二极管工作状态的偏置电压分别为0v/1.5v,可使单元反射系数相位分别为0
°
/180
°
。信号控制平台由fpga 与驱动电路组成,可以生成高速、稳定的控制信号加载至超表面上。
[0094]
根据超表面独立可控单元列数量与信号控制平台的电气性能,设计了一个10
×
32的时空编码矩阵,由10组独立的长度为32的时间编码序列组成,如图3a所示,其中编码
‘0’
代表单元反射系数相位为0
°
,编码
‘1’
代表单元反射系数相位为180
°
。矩阵调制周期为16μs,意味着反射波的谐波频率间隔为62.5khz。通过将相关参数带入式(6),计算出当入射角度θ
i
=45
°
时,反射波在法线方向的频谱分布,如图3b所示。可以看出,理论上反射波中只有奇次谐波分量,而为了在实际中获得较高的信噪比,选出从
‑
9阶到 9阶的所有奇次谐波(共10阶谐波)带入式(7)得到相应的谐波系数矩阵,最终根据本实用新型所述方法估计出达到角θ
e
。此外,图3c实线所示为该情况下各阶谐波(
‑
3 阶到 3阶内所有奇次谐波)远场散射方向图的计算结果,虚线则表示超表面未加时空编码矩阵调制时基波远场散射方向图。该结果表示信息超表面对45
°
入射的电磁波展现了谐波波束偏折的功能,将 1阶谐波偏折向法线方向。
[0095]
接下来,为了验证本实用新型所提出的方案的有效性,使用所加工的超表面样品搭配专用信号控制、采集、处理平台进行了实验验证。当超表面应用所设计的时空编码矩阵后,首先测量了频率为24ghz,45
°
入射时的相关结果。图4a所示为超表面法线方向接收到的频谱数据,其中圆点代表用于对比的计算结果。图4b实线/虚线分别为该情况下 1阶谐波的远场散射方向图的实测/计算结果。图4c、4d分别表示不同入射角度情况下所估计出的达到角与绝对误差,测量范围为[
‑
90
°
,90
°
],测量间隔为3
°
。从结果中可以看出,本实用新型在误差阈值3
°
的条件下,可以准确估计出[
‑
60
°
,60
°
]范围内的入射角度。同时,超表面还能对入射电磁波中各阶谐波分量进行波束偏折。
[0096]
本实用新型所提出的集成到达角估计与电磁调控的信息超表面利用时空编码矩阵操控入射电磁波空间
‑
频率分布的同时,通过分析法线方向上的频谱,还可以实时估计出到达角度。本实用新型原理简单,成本低廉,集成度高,易于实现,这使得其在通信、隐身和成像领域具有十分巨大的应用价值。
[0097]
以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。