用于具有可移动电连接器的电子照相图像形成设备的可更换单元
1.背景
2.1.公开领域
3.本公开总体上涉及图像形成设备,并且更具体地涉及用于具有可移动电连接器的电子照相图像形成设备的可更换单元。
4.2.相关技术的描述
5.在电子照相印刷过程期间,带电旋转感光鼓(photoconductive drum)选择性暴露于激光束。感光鼓暴露于激光束的区域被放电,从而产生要在感光鼓上印刷的页面的静电潜像。然后,感光鼓上的潜像会静电拾取墨粉颗粒,从而在鼓上产生着色图像(toned image)。着色图像直接通过感光鼓或间接通过中间转移构件来转移到印刷介质(例如,纸张)。然后,使用热和压力将墨粉融合到介质以完成印刷。
6.图像形成设备的墨粉供应源通常存储在一个或更多个可更换单元中,该可更换单元具有比图像形成设备更短的使用寿命。期望将可更换单元的各种操作参数和使用信息传达给图像形成设备,以进行正确操作。例如,可能期望传达诸如可更换单元序列号、可更换单元类型、墨粉颜色、墨粉容量、墨粉剩余量、许可证信息等信息。可更换单元通常包括处理电路,该处理电路被配置为与图像形成设备中的控制器通信并且响应来自该控制器的命令。可更换单元还包括与处理电路相关联的存储器,该存储器存储与可更换单元相关的程序指令和信息。处理电路和相关联的存储器通常安装在电路板上,该电路板附接到可更换单元。可更换单元还包括一个或更多个电触点,当可更换单元安装在图像形成设备中时,这些电触点与图像形成设备中的相应的电触点配合,以便促进可更换单元的处理电路和图像形成设备的控制器之间的通信。重要的是,相对于图像形成设备的相应电触点精确定位可更换单元的电触点,以便当可更换单元安装在图像形成设备中时,确保可更换单元的处理电路和图像形成设备的控制器之间的可靠连接。因此,期望提供可更换单元的电触点与图像形成设备的相应电触点的精确对准的定位特征。
7.概述
8.根据一个示例实施例的用于电子照相图像形成设备的可更换单元包括壳体,该壳体具有定位在壳体的第一侧和第二侧之间的顶部、底部、前部和后部。壳体具有用于容纳墨粉的贮存器。电连接器定位在壳体的第一侧。电连接器包括电触点,以用于接触图像形成设备中的相应电触点。可更换单元的电触点电连接到安装在壳体上的处理电路。电连接器在第一位置和第二位置之间可移动。当电连接器从第一位置移动到第二位置时,可更换单元的电触点沿着壳体的侧到侧维度从壳体的第一侧向外移动,使得可更换单元的电触点在电连接器处于第二位置时比在电连接器处于第一位置时沿着壳体的侧到侧维度更远地向外定位。当电连接器处于第二位置时,可更换单元的电触点面向下并且从下面是没有障碍的,从而允许图像形成设备中的相应电触点从下面接触可更换单元的电触点。
9.实施例包括这样的实施例,其中电连接器围绕枢转轴线在第一位置和第二位置之间可枢转。当电连接器从第一位置枢转到第二位置时,可更换单元的电触点从壳体的第一
侧向外枢转。在一些实施例中,枢转轴线的位置相对于壳体是固定的。在一些实施例中,枢转轴线在从壳体的后部到壳体的前部的方向上延伸,并且在从壳体的后部到壳体的前部的方向上向下成角度。在一些实施例中,当电连接器从第一位置枢转到第二位置时,可更换单元的电触点向上枢转。
10.一些实施例包括可旋转地定位在壳体上的显影辊。显影辊的外表面的一部分沿着壳体的前部暴露,以用于将墨粉从贮存器供应到相应的感光鼓。
11.一些实施例包括位于壳体的第二侧上的接口齿轮。接口齿轮的至少一部分暴露在壳体的前部,以用于与相应的驱动齿轮配合并且接收来自相应的驱动齿轮的旋转力。
12.一些实施例包括朝向第一位置偏置电连接器的偏置构件。
13.实施例包括这样的实施例,其中当电连接器处于第二位置时,可更换单元的电触点被定位为更靠近壳体的底部而不是更靠近壳体的顶部,并且可更换单元的电触点被定位为更靠近壳体的后部,而不是更靠近壳体的前部。
14.实施例包括这样的实施例,其中当电连接器处于第一位置时,可更换单元的电触点向内面向壳体的第一侧。
15.实施例包括这样的实施例,其中电连接器包括印刷电路板,该印刷电路板包括处理电路。可更换单元的电触点定位在印刷电路板的面上。当电连接器处于第二位置时印刷电路板的面面向下,并且当电连接器处于第一位置时,印刷电路板的面向内面向壳体的第一侧。
16.实施例包括这样的实施例,其中电连接器包括凸轮表面,该凸轮表面沿着电连接器的相对于壳体的第一侧的远端定位,用于在可更换单元的安装期间接触致动构件,以将电连接器从第一位置移动到第二位置。在一些实施例中,凸轮表面从电连接器的前部部分朝向壳体的前部延伸;当电连接器处于第二位置时,凸轮表面的底部面向下;并且当电连接器处于第二位置时,凸轮表面的底部部分在从壳体的后部到壳体的前部的方向上向上成角度。在一些实施例中,凸轮表面从电连接器的前部部分朝向壳体的前部延伸;当电连接器处于第二位置时,凸轮表面的外侧部分面向外远离壳体的第一侧;并且当电连接器处于第二位置时,凸轮表面的外侧部分在从壳体的后部到壳体的前部的方向上朝向壳体的第一侧向内成角度。
17.根据另一个示例实施例的用于电子照相图像形成设备的可更换单元包括壳体,该壳体具有定位在壳体的第一侧和第二侧之间的顶部、底部、前部和后部。壳体具有用于容纳墨粉的贮存器。与贮存器流体连通的出口定位在壳体的前部,用于从可更换单元排出墨粉。电连接器定位在壳体的第一侧。电连接器包括用于接触图像形成设备中的相应电触点的电触点。可更换单元的电触点电连接到安装在壳体上的处理电路。电连接器围绕枢转轴线在缩回位置和操作位置之间可枢转。当电连接器从缩回位置枢转到操作位置时,电连接器和可更换单元的电触点从壳体的第一侧向外枢转。当电连接器处于操作位置时,可更换单元的电触点面向下并且从下面是没有障碍的,从而允许图像形成设备中的相应电触点从下面接触可更换单元的电触点。
18.附图简述
19.结合在说明书中并构成说明书的一部分的附图示出了本公开的若干方面,并且与描述一起用于解释本公开的原理。
20.图1是根据一个示例实施例的成像系统的框图。
21.图2是根据一个示例实施例的墨粉盒以及成像单元的透视图。
22.图3是图2中所示的墨粉盒的前透视图。
23.图4是图2和图3中所示的墨粉盒的后透视图。
24.图5是图2中所示的成像单元的前透视图。
25.图6是图2和图5中所示的成像单元的后透视图。
26.图7是根据一个示例实施例的示出处于缩回位置的墨粉盒的电连接器的透视图。
27.图8是根据一个示例实施例的示出处于操作位置的墨粉盒的电连接器的透视图。
28.图9是根据一个示例实施例的墨粉盒的电连接器的分解图。
29.图10是根据一个示例实施例的示出成像单元的电连接器的侧透视图。
30.图11是根据一个示例实施例的示出成像单元的电连接器的顶部透视图。
31.图12a
‑
12c是根据一个示例实施例的顺序的侧面立视图,其示出了在将墨粉盒安装到成像单元期间墨粉盒的电连接器从其缩回位置到其操作位置的致动。
32.图13是根据一个示例实施例的安装在成像单元上的墨粉盒的透视图,其示出了处于脱离位置的图像形成设备的电连接器。
33.图14是根据一个示例实施例的横截面视图,其示出了图像形成设备的电连接器处于与墨粉盒和成像单元的电连接器的接合位置。
34.图15是根据一个示例实施例的侧面立视图,其示出了图像形成设备的电连接器处于与墨粉盒和成像单元的电连接器的接合位置。
35.图16是根据一个示例实施例的墨粉盒的电连接器的透视图,其示出了磁传感器。
36.图17a和图17b是根据一个示例实施例的墨粉盒的透视图,其示出了当墨粉盒的电连接器分别处于操作位置和缩回位置时在磁传感器和墨粉盒的墨粉贮存器中的墨粉搅拌器组件之间的位置关系。
37.图18是根据另一个示例实施例的具有电连接器的墨粉盒的透视图。
38.详细描述
39.在下面的描述中,参考附图,其中相同的数字表示相同的元件。足够详细地描述了实施例以使得本领域技术人员能够实践本公开。应当理解,其它实施例可以被利用,并且过程、电气以及机械变化等可以被做出而不偏离本公开的范围。示例仅代表可能的变化。一些实施例的部分和特征可以被包括在其他实施例的部分和特征中或代替其他实施例的部分和特征。因此,以下描述不应被理解为限制性的,并且本公开的范围仅由所附权利要求及其等同物来限定。
40.现在参考附图并且具体地参考图1,示出了根据一个示例实施例的成像系统20的框图描绘。成像系统20包括图像形成设备22和计算机24。图像形成设备22经由通信链路26与计算机24通信。如本文所用,术语“通信链路”大体上是指有利于多个部件之间的电子通信并且可以使用有线或无线技术来进行操作并且可以包括通过互联网进行的通信的任何结构。
41.在图1中所示的示例实施例中,图像形成设备22是多功能机器(有时被称为一体化(aio)设备),其包括控制器28、打印引擎30、激光扫描单元(lsu)31、墨粉盒100、成像单元200、用户界面36、介质馈送系统38、介质输入托盘39以及扫描仪系统40。图像形成设备22可
以经由标准通信协议(例如,诸如通用串行总线(usb)、以太网或ieee 802.xx)与计算机24通信。图像形成设备22可以是例如包括集成扫描仪系统40的电子照相打印机/复印机或独立电子照相打印机。
42.控制器28包括处理器单元和相关联的电子存储器29。处理器单元可包括以微处理器或中央处理单元形式的一个或更多个集成电路,并且可以包括一个或更多个专用集成电路(asic)。存储器29可以是任何易失性或非易失性存储器或其组合,诸如例如随机存取存储器(ram)、只读存储器(rom)、闪存存储器和/或非易失性ram(nvram)。存储器29可以是以单独存储器(例如,ram、rom和/或nvram)、硬盘驱动器、cd或dvd驱动器或便于与控制器28一起使用的任何存储器设备的形式。控制器28可以是例如组合的打印机和扫描仪控制器。
43.在所示的示例实施例中,控制器28经由通信链路50与打印引擎30通信。控制器28经由通信链路51与墨粉盒100及其上的处理电路44通信。控制器28经由通信链路52与成像单元200以及其上的处理电路45通信。控制器28经由通信链路53与介质馈送系统38通信。控制器28经由通信链路54与扫描仪系统40通信。用户界面36经由通信链路55通信地联接到控制器28。控制器28处理打印和扫描数据,并在打印期间操作打印引擎30,并在扫描期间操作扫描仪系统40。处理电路44、45可以分别提供关于墨粉盒100和成像单元200的认证功能、安全性及操作联锁、操作参数和使用信息。处理电路44、45中的每一个都包括处理器单元和相关联的电子存储器。如上所讨论,处理器可以包括以微处理器或中央处理单元形式的一个或更多个集成电路,和/或可以包括一个或更多个专用集成电路(asic)。存储器可以是任何易失性或非易失性存储器或其组合或者便于与处理电路44、45一起使用的任何存储器设备。
44.任选的计算机24可以是例如个人计算机,其包括电子存储器60(诸如ram、rom和/或nvram)、输入设备62(诸如键盘和/或鼠标)和显示监视器64。计算机24还包括处理器、输入/输出(i/o)接口,并且可以包括至少一个大容量数据储存设备,诸如硬盘驱动器、cd
‑
rom和/或dvd单元(未示出)。计算机24还可以是能够与图像形成设备22进行通信的设备,除了诸如例如平板计算机、智能电话或其他电子设备的个人计算机之外。
45.在所示的示例实施例中,计算机24在其存储器中包括软件程序,该软件程序包括用作图像形成设备22的成像驱动器66的程序指令(例如,打印机/扫描仪驱动器软件)。成像驱动器66经由通信链路26与图像形成设备22的控制器28通信。成像驱动器66有利于图像形成设备22与计算机24之间的通信。成像驱动器66的一方面可以是例如将格式化的打印数据提供给图像形成设备22,并且更具体地提供给打印引擎30以打印图像。成像驱动器66的另一方面可以是例如有利于收集来自扫描仪系统40的扫描数据。
46.在一些情况下,可能期望以独立模式操作图像形成设备22。在独立模式中,图像形成设备22能够在没有计算机24的情况下运行。因此,成像驱动器66或类似驱动器的全部或一部分可以位于图像形成设备22的控制器28中以便在以独立模式操作时调节打印和/或扫描功能。
47.打印引擎30包括激光扫描单元(lsu)31、墨粉盒100、成像单元200以及定影器37,其全部都被安装在图像形成设备22内。墨粉盒100和成像单元200可移除地安装在图像形成设备22中。在一个实施例中,墨粉盒100包括容纳墨粉贮存器和墨粉显影系统的显影单元。在一个实施例中,墨粉显影系统利用通常被称为单部件显影系统的系统。在该实施例中,墨
粉显影系统包括墨粉添加辊,该墨粉添加辊将墨粉从墨粉贮存器提供给显影辊。刮墨刀在显影辊的表面上提供计量的均匀墨粉层。在另一个实施例中,墨粉显影系统利用通常被称为双部件显影系统的系统。在该实施例中,显影单元的墨粉贮存器中的墨粉与磁性载体珠混合。磁性载体珠可以涂覆有聚合物膜以提供摩擦电性质,以便在墨粉和磁性载体珠在墨粉贮存器中混合时将墨粉吸引到载体珠。在该实施例中,显影单元包括显影辊,该显影辊通过使用磁场将其上具有墨粉的磁性载体珠吸引到显影辊。在一个实施例中,成像单元200包括容纳充电辊、感光鼓和废墨粉移除系统的光导单元(photoconductor unit)。尽管图1所示的示例图像形成设备22包括一个墨粉盒和成像单元,但是在被配置为彩色打印的图像形成设备的情况下,可以针对每种墨粉颜色使用单独的墨粉盒和成像单元。例如,在一个实施例中,图像形成设备包括四个墨粉盒和四个相应的成像单元,每个墨粉盒包含特定的墨粉颜色(例如,黑色、青色、黄色和品红色)以允许彩色打印。
48.电子照相打印过程在本领域中是众所周知的并且因此在本文中简要描述。在打印操作期间,激光扫描单元31在成像单元200中的感光鼓上创建潜像。墨粉由显影辊从墨粉盒100中的墨粉贮存器传输到感光鼓上的潜像,以创建着色图像。着色图像接着被传输到由成像单元200从介质输入托盘39接收到的介质片材以用于打印。墨粉可以由感光鼓或由从感光鼓接收墨粉的中间传输构件被直接传输至介质片材。剩余的墨粉通过废墨粉移除系统从感光鼓移除。墨粉图像在定影器37中结合到介质片材,并且接着被发送至输出位置或是一个或更多个完成选项,例如是双面打印器、订书机或是打孔器。
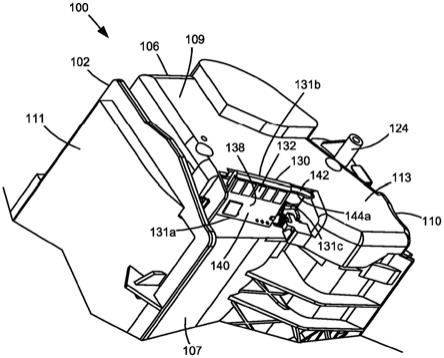
49.现在参照图2,根据一个示例实施例,示出了墨粉盒100和成像单元200。如上所讨论,墨粉盒100和成像单元200各自可移除地安装在图像形成设备22中。墨粉盒100首先安装在成像单元200的框架204上,并且与成像单元200配合。然后,墨粉盒100和成像单元200一起可滑动地插入图像形成设备22。图2中所示的箭头a指示墨粉盒100和成像单元200插入图像形成设备22的方向。这种布置允许墨粉盒100和成像单元200作为单个单元容易地从图像形成设备22移除并重新安装在图像形成设备22中,同时允许墨粉盒100和成像单元200彼此分开地被修理或更换。
50.参考图2
‑
4,墨粉盒100包括壳体102,该壳体102具有用于储存墨粉的封闭的贮存器104(图17a和图17b)。壳体102包括顶部106、底部107、第一侧108和第二侧109、前部110和后部111。在将墨粉盒100插入图像形成设备22期间,壳体102的前部110在前,后部111在后。在一个实施例中,壳体102的每一侧108、109包括例如通过紧固件或卡扣配合接合件安装到壳体102的主体116的侧壁114、115的端盖112、113。在所示的示例实施例中,墨粉盒100包括可旋转的显影辊120,该显影辊120具有旋转轴线121,该旋转轴线121沿着壳体102的侧到侧维度(side
‑
to
‑
side dimension)118从侧面108延伸到侧面109。显影辊120的一部分沿着壳体102的前部110、靠近壳体102的底部107从壳体102暴露,以用于将墨粉从墨粉盒100输送到成像单元200的相应的感光鼓。以这种方式,显影辊120形成用于从墨粉盒100排出墨粉的出口。手柄122可以设置在壳体102的顶部106或后部111上,以帮助将墨粉盒100联接到成像单元200和将墨粉盒100从成像单元200分离,以及将墨粉盒100和成像单元200插入和移出图像形成设备22。
51.侧面108、侧面109可以各自包括一个或更多个对准引导件124,该对准引导件124从相应的侧面108、侧面109向外延伸,以帮助将墨粉盒100与成像单元200配合。对准引导件
124由成像单元200上的相应导轨接收,该导轨有助于相对于成像单元200定位墨粉盒100。在所示的示例实施例中,对准引导件124被定位在每个端盖112、113的外侧上。
52.墨粉盒100还包括定位在壳体102的侧面108上的驱动齿轮126。在所示的实施例中,驱动齿轮126与成像单元200上的相应的驱动齿轮配合并接收来自该相应的驱动齿轮的旋转力,以便当墨粉盒100安装在图像形成设备22中时,向显影辊120和墨粉盒100的其他可旋转部件提供旋转力,以用于将墨粉移动到显影辊120。在所示的实施例中,驱动齿轮126安装在显影辊120的轴上,与显影辊120同轴。在该实施例中,驱动齿轮126的前部部分暴露在壳体102的、靠近壳体102的底部107的前部110上,并且没有障碍地与成像单元200上的相应的驱动齿轮配合和接收来自该相应的驱动齿轮的旋转力。在所示的实施例中,驱动齿轮126可旋转地连接到定位在端盖112和壳体102的侧壁114之间的传动系(drive train)。传动系有助于将旋转力从驱动齿轮126传递到墨粉盒100的可旋转部件,该可旋转部件包括例如墨粉添加辊和一个或更多个墨粉搅拌器,该墨粉添加辊将墨粉从贮存器104提供给显影辊120,该一个或更多个墨粉搅拌器将贮存器104中的墨粉向墨粉添加辊移动并搅拌和混合贮存器104中的墨粉。在所示的示例实施例中,驱动齿轮126形成为斜齿轮,但是根据需要也可以使用其他配置。
53.墨粉盒100还包括定位在壳体102的侧面109上的电连接器130,该电连接器130包括一个或更多个电触点132(图8),当墨粉盒100安装在图像形成设备22中时,该一个或更多个电触点132与图像形成设备22中的相应电触点配合,以便于促进图像形成设备22的控制器28和墨粉盒100的处理电路44之间的通信链路51,如下面更详细讨论的。
54.参考图2、图5和图6,成像单元200包括壳体202,该壳体202包括顶部206、底部207、第一侧面和第二侧面208、209、前部210和后部211。在将成像单元200插入图像形成设备22期间,壳体202的前部210在前,并且后部211拖尾。在所示的实施例中,框架204包括定位在壳体202的后部211处的墨粉盒接收区域205。手柄212可以设置在壳体202的后部211上(例如框架204上),以帮助将墨粉盒100和成像单元200插入和移出图像形成设备22。
55.在所示的示例实施例中,成像单元200包括可旋转的感光鼓220,该感光鼓220具有旋转轴线221,该旋转轴线221沿着壳体202的侧到侧维度218从侧面208延伸到侧面209。感光鼓220的后部部分向框架204的墨粉盒接收区域205敞开,以用于从墨粉盒100的显影辊120接收墨粉。感光鼓220的底部部分在壳体202的底部207上从壳体202暴露。在打印操作期间,感光鼓220的外表面上的墨粉从感光鼓220的外表面的底部部分传输到介质片材或中间传输构件。成像单元200还包括与感光鼓220的外表面接触的可旋转充电辊222,该充电辊222将感光鼓220的外表面充电到预定电压。成像单元200还包括废墨粉移除系统,该废墨粉移除系统可以包括从感光鼓220的外表面移除残留墨粉的清洁器刀片或辊。在所示的示例实施例中,成像单元200包括定位在壳体202的前部210处的废墨粉贮存器224。废墨粉贮存器224存储由清洁器刀片或辊从感光鼓220移除的墨粉。
56.侧面208、侧面209可以各自包括一个或更多个对准引导件226,该对准引导件226从相应的侧面208、侧面209向外延伸,以帮助将墨粉盒100和成像单元200插入和移出图像形成设备22。对准引导件226由图像形成设备22中的相应的导轨接收,该导轨有助于相对于图像形成设备22定位墨粉盒100和成像单元200。框架204的侧面208、侧面209可以各自包括导轨228,该导轨228接收墨粉盒100的相应的对准引导件124,以有助于相对于成像单元200
定位墨粉盒100。
57.成像单元200还包括定位在壳体202的侧面208上的驱动联接器230。当成像单元200安装在图像形成设备22中时,驱动联接器230与图像形成设备22中的相应的驱动联接器配合并且接收来自该相应的驱动联接器的旋转力,以便向感光鼓220提供旋转力。在所示的实施例中,驱动联接器230定位在感光鼓220的轴向端部,与感光鼓220同轴。在该实施例中,驱动联接器230的外轴向端部暴露在壳体202的侧面208上,并且没有障碍地与图像形成设备22中的相应的驱动联接器配合并且接收来自该相应的驱动联接器的旋转力。在所示的示例实施例中,驱动联接器230被配置为在驱动联接器230的外轴向端部处接收旋转力,但是根据需要也可以使用其他配置。在一些实施例中,充电辊222由充电辊222的表面和感光鼓220的表面之间的摩擦接触来驱动。在其他实施例中,充电辊222通过一个或更多个齿轮连接到驱动联接器230。
58.在所示的实施例中,成像单元200还包括附接到感光鼓220的、在驱动耦合器230轴向内侧的驱动齿轮232。驱动齿轮232的一部分暴露于框架204的墨粉盒接收区域205,从而当墨粉盒100安装在成像单元200的框架204上时允许墨粉盒100的驱动齿轮126与成像单元200的驱动齿轮232配合,以允许成像单元200的驱动联接器230接收的旋转力通过成像单元200的驱动齿轮232传递到墨粉盒100的驱动齿轮126。
59.成像单元200还包括定位在壳体202的侧面209上的框架204的一部分上的电连接器240,该电连接器240包括一个或更多个电触点242,当成像单元200安装在图像形成设备22中时,该一个或更多个电触点242与图像形成设备22中的相应电触点配合,以便于促进图像形成设备22的控制器28和成像单元200的处理电路45之间的通信链路52,如下面更详细讨论的。
60.图7
‑
9更详细地示出了墨粉盒100的电连接器130。在所示的示例实施例中,电连接器130定位在壳体的侧面109上、靠近壳体102的底部107和后部111。电连接器130可移动地连接到壳体102,使得电连接器130相对于壳体102在图7所示的缩回或原始位置和图8所示的操作位置之间可移动。在所示的示例实施例中,电连接器130围绕枢转轴线134相对于壳体102在缩回位置和操作位置之间可枢转。在所示的示例实施例中,枢转轴线134在从后部111到前部110的方向上延伸,并且从后部111到前部110向下成角度(angle),但是枢转轴线134可以根据需要采取其他取向。在所示的示例实施例中,枢转轴线134沿着电连接器130的相对于壳体102的侧面109和沿着壳体102的侧到侧维度118的贮存器104的近端131a定位。在一些实施例中,电连接器130被偏置构件136朝向缩回位置偏置。在所示的示例实施例中,偏置构件136包括扭力弹簧;然而,可以根据需要使用任何合适的偏置构件136,诸如例如一个或更多个压缩弹簧、拉伸弹簧、片簧或具有弹性特性的材料。
61.在所示的实施例中,电连接器130包括印刷电路板138,该印刷电路板138具有定位在其上的电触点132和处理电路44。印刷电路板138可以根据需要通过合适的紧固件或粘合剂附接。电触点132定位在印刷电路板138的面140上。在所示的示例实施例中,在图7所示的电连接器130的缩回位置,包括电触点132的印刷电路板138的面140向下面向壳体102的底部107,并且向内面向壳体102的侧面109。除了面向下和向内之外,在所示的实施例中,当电连接器由于枢转轴线134的角度而处于其缩回位置时,包括电触点132的印刷电路板138的面140还向后面向壳体102的后部111。在图8所示的电连接器130的操作位置,包括电触点
132的印刷电路板138的面140向下(诸如例如主要向下)面向壳体102的底部107。除了面向下之外,在所示的实施例中,当电连接器处于其操作位置时,由于枢转轴线134的角度并且稍微向外远离壳体102的侧面109,包括电触点132的印刷电路板138的面140还向后面向壳体102的后部111。电触点132沿着电连接器130的相对于壳体102的侧面109和沿着壳体102的侧到侧维度118的贮存器104的远端131b定位,在所示的实施例中,当电连接器130处于其操作位置时,这还形成了电连接器130相对于枢转轴线134的自由端。
62.因此,在该实施例中,当电连接器130从其缩回位置移动到其操作位置时,电连接器130相对于壳体102绕枢转轴线134向上枢转,其中包括电触点132的印刷电路板138的面140围绕枢转轴线134向上和向外远离侧面109摆动。当电连接器130从其操作位置移动到其缩回位置时,这种移动是反向的,其中电连接器130围绕枢转轴线134相对于壳体102向下枢转,其中包括电触点132的印刷电路板138的面140围绕枢转轴线134朝向侧面109向下和向内摆动。在所示的示例实施例中,当电连接器130处于其操作位置且印刷电路板138的面140面向下时,电触点132从壳体102暴露,并且从下面是没有障碍的,从而允许图像形成设备22中的相应电触点从下面接触电连接器130的电触点132并且与该电触点132配合。在该实施例中,当电连接器130处于其缩回位置且印刷电路板138朝向侧面109向下和向内摆动时,电触点132部分地被隐藏,以便帮助保护电触点132和印刷电路板138免受污染、静电放电和物理损坏。
63.电连接器130包括致动构件142,该致动构件142被定位成接收力以克服由偏置构件136施加到电连接器130的偏置,以便将电连接器130从其缩回位置移动到其操作位置。在所示的实施例中,致动构件142包括沿着电连接器130的远端131b的凸轮表面144,该凸轮表面144从靠近壳体102的前部110的电连接器130的前端131c朝向壳体102的前部110向前延伸。凸轮表面144包括:底部部分144a,当电连接器130处于其操作位置时,该底部部分144a面向下朝向壳体102的底部107;以及外侧部分144b,当电连接器130处于其操作位置时,该外侧部分144b面向外远离壳体102的侧面109。在所示的实施例中,凸轮表面144的底部部分144a在从壳体102的后部111到前部110的方向上远离印刷电路板138的面140和电触点132相对于印刷电路板138的面140向上成角度,并且凸轮表面144的外侧部分144b在从壳体102的后部111到前部110的方向上朝向枢转轴线134向内成角度。
64.虽然所示的示例实施例包括定位在具有处理电路44的印刷电路板138上的电触点132,但是在其他实施例中,具有处理电路44的印刷电路板138定位在壳体102上的其他地方,并且电触点132设置在电连接器130上所示的位置,并且通过合适的迹线、导线等连接到处理电路44。
65.图10和图11更详细地示出了成像单元200的电连接器240。在该实施例中,成像单元200的框架204包括壳体202的侧面208上的侧壁234、壳体202的侧面209上的侧壁235和壳体202的后部211上的后壁236(图5和图6)。在该实施例中,电连接器240包括定位在框架204的侧壁235上的安装件246上的印刷电路板244。印刷电路板244可以根据需要通过合适的紧固件或粘合剂附接。成像单元200的处理电路45定位在印刷电路板244上。安装件246包括底表面248以及前壁249和后壁250,前壁249和后壁250从底表面248向上并且沿着侧到侧维度218延伸。在所示的实施例中,印刷电路板244定位在安装件246的前壁249和后壁250之间在安装件246的底表面248上。在该实施例中,电触点242定位在印刷电路板244的顶面252上,
使得电触点242面向上朝向壳体202的顶部206。印刷电路板244和安装件246定位成邻接开口254,该开口254在安装件246的外侧延伸穿过框架204的侧壁235,并允许图像形成设备22中的相应电触点从成像单元200的壳体202的侧面209和墨粉盒100的壳体102的侧面109接近并配合成像单元200的电连接器240的电触点242和墨粉盒100的电连接器130的电触点132,如下面更详细讨论的。
66.在所示的实施例中,安装件246的前壁249包括致动构件,例如前壁249的顶部边缘上的凸轮表面256,当墨粉盒100安装在成像单元200的框架204上时,该凸轮表面256接触墨粉盒100的电连接器130的凸轮表面144,以便将墨粉盒100的电连接器130从其缩回位置移动到其操作位置,如下面更详细讨论的。在该实施例中,凸轮表面256在从壳体202的侧面208到侧面209的方向上向上成角度。在所示的实施例中,上挡块258沿着开口254的顶部边缘在凸轮表面256上方间隔开。上挡块258被定位成限制墨粉盒100的电连接器130从其缩回位置到其操作位置的行进,如下面更详细讨论的。
67.虽然所示的示例实施例包括定位在具有处理电路45的印刷电路板244上的电触点242,但是在其他实施例中,具有处理电路45的印刷电路板244定位在壳体202上的其他地方,并且电触点242设置在电连接器240上所示的位置(例如在安装件246上),并且通过合适的迹线、导线等连接到处理电路45。
68.图12a
‑
12c是顺序视图,其示出了在将墨粉盒100安装到成像单元200的框架204上的期间,墨粉盒100的电连接器130从其缩回位置到其操作位置的致动。在所示的示例实施例中,在将墨粉盒100安装到成像单元200的框架204上的期间,墨粉盒100的对准引导件124和成像单元200的导轨228之间的接合控制墨粉盒100相对于成像单元200的定位。在该实施例中,在将墨粉盒100安装到成像单元200的框架204上的期间,墨粉盒100围绕枢转轴线逆时针方向枢转(如图12a
‑
12c所示),该枢转轴线从壳体102的侧面108上的对准引导件124延伸到壳体102的侧面109上的对准引导件124。
69.图12a示出了当墨粉盒100下降到成像单元200的框架204中时的墨粉盒100,其中当电连接器130的致动构件142的凸轮表面144开始接触成像单元200的安装件246的前壁249上的凸轮表面256时,墨粉盒100的电连接器130处于其缩回位置。当墨粉盒100下降到成像单元200的框架204中时,电连接器130的凸轮表面144和成像单元200的凸轮表面256之间的接触克服了由偏置构件136施加到电连接器130的偏置力,并且导致电连接器130围绕枢转轴线134从其缩回位置朝向其操作位置摆动(如图12a
‑
12c所示离开页面)。随着墨粉盒100继续下降到成像单元200的框架204中,电连接器130的凸轮表面144沿着成像单元200的凸轮表面256的成角度部分向上行进,使得电连接器130继续围绕枢转轴线134从其缩回位置朝向其操作位置枢转。图12b示出了当墨粉盒100下降到成像单元200的框架204中时墨粉盒100的电连接器130处于缩回位置和操作位置之间的中间位置。当墨粉盒100到达其相对于成像单元200的最终安装位置时,电连接器130的凸轮表面144和成像单元200的凸轮表面256之间的接触将墨粉盒100的电连接器130保持在其操作位置,其中电连接器130的电触点132面向下。
70.图12c示出了完全安装在成像单元200的框架204上的墨粉盒100,其中电连接器130处于其操作位置。当墨粉盒100相对于成像单元200处于其最终位置时,墨粉盒100的电触点132和成像单元200的电触点242通过框架204的侧壁235中的开口254暴露于成像单元
200的外部,从而当墨粉盒100和成像单元200被安装在图像形成设备22中时,允许图像形成设备22中的电连接器进入开口254并且与墨粉盒100的电触点132和成像单元200的电触点242配合。在该实施例中,当墨粉盒100相对于成像单元200处于其最终位置且墨粉盒100的电连接器130处于其操作位置时,墨粉盒100的电触点132面向下,并且成像单元200的电触点242面向上,使得墨粉盒100的电触点132和成像单元200的电触点242以间隔关系彼此面对,其中垂直间隙300定位在墨粉盒100的电触点132和成像单元200的电触点242之间。
71.图13示出了安装在成像单元200上的墨粉盒100,其中墨粉盒100和成像单元200安装在图像形成设备22中,并且图像形成设备22的电连接器302相对于墨粉盒100和成像单元200定位在脱离位置。省略了电连接器302安装到其上并从其延伸的图像形成设备22的框架,以便更清楚地示出电连接器302与墨粉盒100和成像单元200之间的位置关系。在该实施例中,当电连接器302处于脱离位置时,电连接器302远离墨粉盒100和成像单元200的侧面109、侧面209向外侧向间隔开。图像形成设备22的电连接器302包括其顶部部分上的电触点304和其底部部分上的电触点306。电触点304被定位成在墨粉盒100和成像单元200被安装在图像形成设备22中之后,当电连接器302从脱离位置移动到接合位置时,接触墨粉盒100的电触点132,以促进图像形成设备22的控制器28和墨粉盒100的处理电路44之间的通信链路51。类似地,电触点306被定位成在墨粉盒100和成像单元200被安装在图像形成设备22中之后当电连接器302从脱离位置移动到接合位置时,接触成像单元200的电触点242,以促进图像形成设备22的控制器28和成像单元200的处理电路45之间的通信链路52。在一个实施例中,电连接器302可操作地连接到图像形成设备的检查门(access door),该检查门允许用户接近图像形成设备22内的墨粉盒100和成像单元200,使得检查门的关闭将电连接器302从其脱离位置移动到其接合位置,并且检查门的打开将电连接器302从其接合位置移动到其脱离位置。在其他实施例中,图像形成设备22的电机、螺线管等选择性地在脱离位置和接合位置之间移动电连接器302。
72.图14示出了安装在成像单元200上的墨粉盒100,其中墨粉盒100和成像单元200安装在图像形成设备22中,并且图像形成设备22的电连接器302相对于墨粉盒100和成像单元200定位在接合位置。再次,为了清楚起见,省略了安装有电连接器302的图像形成设备22的框架。在墨粉盒100和成像单元200彼此配合并且安装在图像形成设备22中之后,电连接器302从脱离位置移动到接合位置。在所示的实施例中,当电连接器302从脱离位置移动到接合位置时,电连接器302沿着壳体102的侧到侧维度118朝向墨粉盒100和成像单元200平移。随着电连接器302朝向墨粉盒100和成像单元200前进,电连接器302穿过成像单元200的框架204的开口254,并且进入墨粉盒100的电触点132和成像单元200的电触点242之间的垂直间隙300。在所示的实施例中,当电连接器302到达接合位置时,电连接器302的电触点304和306被配置成向外弹起(如图14所示,分别为顺时针方向和逆时针方向),以分别与墨粉盒100的电触点132和成像单元200的电触点242接触。电连接器302的电触点304和306还是可偏转的,并且其尺寸被设计为在电连接器302到达接合位置时,分别与墨粉盒100的电触点132和成像单元200的电触点242过盈配合,以便在电连接器302的电触点304和306与墨粉盒100的电触点132和成像单元200的电触点242之间保持一致、可靠的电接触。
73.图15示出了处于接合位置的电连接器302穿过成像单元200的开口254,其中电连接器302的电触点304和306与墨粉盒100的电触点132和成像单元200的电触点242接触。在
所示的实施例中,由图像形成设备22的电连接器302的电触点304施加到墨粉盒100的电连接器130的向上的力推动电连接器130的上表面抵靠成像单元200的上挡块258,以便限制电连接器130的向上移动。在该实施例中,由图像形成设备22的电连接器302的电触点304施加到墨粉盒100的电触点132的向上的力等于由图像形成设备22的电连接器302的电触点306施加到成像单元200的电触点242的向下的力并且与该向下的力相反。成像单元200的上挡块258和墨粉盒100的电连接器130的上表面之间的接触导致墨粉盒100的电连接器130的上表面上的向下反作用力,这有助于将来自电连接器302的大部分力保持在成像单元200上,成像单元200在安装后牢固地定位在图像形成设备22中,而不是墨粉盒100上。相反,如果省略成像单元200的上挡块258,则墨粉盒100的电连接器130上的向上的力可以倾向于相对于成像单元200向上提升墨粉盒100,进而减小显影辊120和感光鼓220之间的夹力(nip force),这可能导致打印缺陷。
74.当图像形成设备22的电连接器302从接合位置移动到脱离位置时(例如,当打开图像形成设备22的检查门时),电连接器302的运动被反转,使得电连接器302离开开口254并且远离墨粉盒100和成像单元200移动,从而返回到图13所示的位置。在所示的实施例中,当电连接器302从接合位置移动到脱离位置时,电连接器302的电触点304和306向内返回(分别为逆时针方向和顺时针方向,如图14所示)。
75.参考图16,在一些实施例中,墨粉盒100的电连接器130还包括定位在印刷电路板138上的磁传感器150,以用于检测可移动地定位在墨粉盒100的贮存器104中的一个或更多个磁体。磁传感器150可以是能够检测磁场的存在与否的任何适当的设备。例如,磁传感器150可以是霍尔效应传感器,其是响应于磁场而改变其电输出的换能器。在所示的实施例中,磁传感器150定位在印刷电路板138的面141上,该面141与包括电触点132的印刷电路板138的面140相对。在该实施例中,磁传感器150沿着电连接器130的靠近贮存器104的近端131a定位(例如,与电连接器130的枢转轴线134一致)。在所示的实施例中,磁传感器150与印刷电路板138的面141正交定位,使得磁传感器150的感测轴线152平行于印刷电路板138的面141取向。在该取向中,当电连接器130处于操作位置时,磁传感器150的感测轴线152大体上平行于壳体102的侧到侧维度118。在所示的实施例中,磁传感器150例如经由印刷电路板138上的一根或更多根迹线电连接到印刷电路板138上的电触点132之一,以用于经由通信链路51将磁传感器150的输出传输到图像形成设备22的控制器28。
76.图17a和图17b示出了根据一个示例实施例的墨粉盒100,其中省略了壳体102的前部110的一部分,并且省略了侧壁115,以便示出磁传感器150和贮存器104中的各种特征之间的位置关系。图17a示出了处于操作位置的电连接器130,并且图17b示出了处于缩回位置的电连接器130。在所示的示例实施例中,墨粉盒100包括可旋转地安装在贮存器104中的墨粉搅拌器组件160。墨粉搅拌器组件160包括可旋转地定位在贮存器104中的驱动轴162,该驱动轴162分别延伸穿过侧壁114、115中对准的开口。驱动轴162可操作地连接到驱动齿轮126,以接收来自驱动齿轮126的旋转力。例如,与驱动齿轮126(直接地或通过一个或更多个中间齿轮间接地)配合的驱动齿轮可以设置在驱动轴162的端部。
77.墨粉搅拌器组件160包括一个或更多个从驱动轴162向外延伸的墨粉搅拌器164,以用于混合贮存器104中的墨粉,并用于将墨粉移向墨粉盒100的墨粉添加辊。墨粉搅拌器164可以根据墨粉盒100的结构采取许多不同的形状和配置,包括例如一个或更多个桨叶、
螺旋钻、耙、梳、勺、犁、臂、延伸部、叉、翼片、混合器、输送机、螺杆等的任何合适的组合)。
78.在所示的实施例中,墨粉搅拌器组件160包括至少一个永磁体166,该永磁体166响应于驱动轴162和墨粉搅拌器组件160的旋转而在贮存器104内移动。在一些实施例中,在如由磁传感器150感测的驱动轴162的旋转期间磁体166的移动提供了贮存器104中存在的墨粉量的指示。例如,磁体可以定位在以下美国专利中描述的取向之一中:题为“replaceable unit for an image forming device having a falling paddle for toner level sensing”的第8,989,611号美国专利、题为“replaceable unit for an image forming device having magnets of varying angular offset for toner level sensing”的第9,389,582号美国专利或者题为“replaceable unit for an image forming device having magnets of varying angular offset for toner level sensing”的第9,519,243号美国专利,所有这些美国专利都被转让给本技术的受让人。在其他实施例中,磁体166可以提供墨粉盒100的一个或更多个特征的指示,例如墨粉盒类型、墨粉颜色、墨粉容量、制造或使用的地理区域等。在所示的实施例中,磁体166定位在靠近侧壁115的贮存器104的轴向端部。
79.如图17a所示,当墨粉盒100的电连接器130处于操作位置时,磁传感器150的感测轴线152大体上平行于壳体102的侧到侧维度118和驱动轴162,使得磁传感器150被取向为当磁体166通过磁传感器150时检测磁体166穿过侧壁115的磁场。如图17b所示,当墨粉盒100的电连接器130处于缩回位置时,磁传感器150相对于壳体102的侧到侧维度118和驱动轴162向上成角度。因此,在一些实施例中,当电连接器130处于缩回位置时,磁传感器150与磁体166不对准,并且当磁体166经过磁传感器150时,磁传感器150可能不会感测到磁体166。因此,在所示的实施例中,在将墨粉盒100安装在成像单元200上时,墨粉盒100的电连接器130从缩回位置到操作位置的移动将磁传感器150从相对于磁体166的未对准位置移动到相对于磁体166的对准位置。
80.应当理解,墨粉盒100的电连接器130的配置(包括电连接器130在缩回位置和操作位置之间的运动)不限于所示的示例实施例。例如,所示的实施例包括电连接器130,该电连接器130围绕固定枢转轴线134在缩回位置和操作位置之间枢转。然而,在其他实施例中,当墨粉盒的电连接器在缩回位置和操作位置之间枢转时,墨粉盒的电连接器的枢转轴线的位置相对于墨粉盒的壳体移动。
81.此外,所示的实施例包括刚性电连接器130,该刚性电连接器130包括定位在刚性印刷电路板138上的电触点132。然而,在其他实施例中,墨粉盒的电连接器的电触点相对于墨粉盒的壳体是柔性的,从而允许电触点在缩回位置和操作位置之间挠曲。例如,墨粉盒的电连接器的电触点可以形成在柔性印刷电路板上,或者电触点可以电连接到安装在墨粉盒的壳体上其他地方的印刷电路板,并且定位在除印刷电路板之外的柔性基底上或连接到该柔性基底。
82.此外,尽管所示的实施例包括在缩回位置和操作位置之间枢转的墨粉盒100的电连接器130,但是应当理解,墨粉盒的电连接器可以以其他方式相对于墨粉盒的壳体在缩回位置和操作位置之间移动,例如在缩回位置和操作位置之间平移。例如,图18示出了墨粉盒1100,该墨粉盒1100具有定位在壳体1102的侧面1109上的电连接器1130。当电连接器1130从缩回位置行进到操作位置时,电连接器1130向外侧向(远离侧面1109)平移,而当电连接
器1130从操作位置行进到缩回位置时,电连接器1130向内侧向(朝向侧面1109)平移。在所示的实施例中,电连接器1130平行于壳体1102的侧到侧维度1118平移。在其他实施例中,电连接器1130与壳体1102的侧到侧维度1118成角度平移(例如向上、向下、向后和/或向前)。在所示的示例实施例中,电连接器1130在缩回位置和操作位置之间的移动由从电连接器1130延伸的柱1170和壳体1102上的细长槽1172之间的接合来控制。然而,这种配置可以颠倒,或者可以根据需要使用其他配置。在所示的示例实施例中,电连接器1130包括致动构件1142,该致动构件1142具有凸轮表面1144,在将墨粉盒1100安装到成像单元期间,该凸轮表面1144接触成像单元上的相应致动构件,以将电连接器130从缩回位置移动到操作位置。
83.还应当理解,成像单元200可以包括一个或更多个致动或凸轮特征,这些致动或凸轮特征根据需要相对于所示的示例实施例的凸轮表面256进行修改,以便在将墨粉盒安装到成像单元上的期间,将墨粉盒的电连接器从缩回位置致动到操作位置。可替代地,墨粉盒的电连接器可以由其他装置致动,诸如由图像形成设备的检查门的打开和关闭致动的联动装置或者由用户致动的机构致动。
84.虽然所示的示例实施例包括定位在电连接器130上的磁传感器150,该电连接器130在缩回位置和操作位置之间移动,但是在包括磁传感器的其他实施例中,磁传感器150和电触点132中的一者或两者可以根据需要固定地定位在墨粉盒100的壳体102上。
85.虽然所示的示例实施例包括具有可移动电连接器130的墨粉盒100和具有致动构件的成像单元200,该致动构件在墨粉盒100安装到成像单元200的期间将电连接器130从其缩回位置移动到其操作位置,但是该配置可以根据需要颠倒,使得成像单元包括可移动电连接器,并且墨粉盒包括致动构件,该致动构件在墨粉盒与成像单元配合期间将电连接器从缩回位置移动到操作位置。
86.尽管上面讨论的示例实施例包括墨粉盒100(该墨粉盒100包括用于图像形成设备和显影单元的主墨粉供应源)以及包括用于每种墨粉颜色的光导单元的成像单元200形式的一对可更换单元,但是应当理解,图像形成设备的可更换单元可以根据需要采用任何合适的配置。例如,在一个实施例中,用于图像形成设备的主墨粉供应源设置在第一可更换单元中,并且显影单元和光导单元设置在第二可更换单元中。在另一个实施例中,用于图像形成设备的主墨粉供应源、显影单元和光导单元设置在单个可更换单元中。可以根据需要使用其他配置。
87.此外,应当理解,图2
‑
6中所示的墨粉盒100和成像单元200的结构和形状仅旨在用作示例。本领域技术人员理解墨粉盒和其他墨粉容器可以采取许多不同的形状和配置。
88.前面的描述示出了本公开的各个方面。它不旨在是详尽的。相反,选择它以示出本公开的原理及其实际应用,以使本领域的普通技术人员能够利用本公开,包括自然而然地进行的其各种修改。所有修改和变化被设想为在如由所附权利要求确定的本公开的范围内。相对明显的修改包括将各种实施例的一个或更多个特征与其他实施例的特征组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。