基于bp神经网络的自适应可重构比例
‑
积分
‑
微分控制器
技术领域
1.本发明属于电力电子领域,涉及一种基于bp神经网络的自适应可重构比例
‑
积分
‑
微分(p
‑
i
‑
d)控制器,尤其适用于智能控制数字电源。
背景技术:
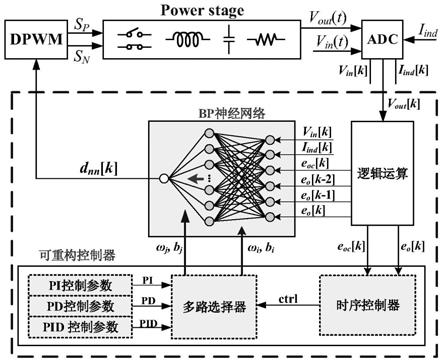
2.数字控制dc
‑
dc开关变换器(以下简称为数字电源)的结构如附图7所示。负载端的模拟输出电压v
out
(t)经adc转换为数字输出量v
out
[k],然后将v
out
[k]与基准电压v
ref
[k]之间的误差信号e[k]送入数字补偿器。在数字补偿器中,采用特定的数字控制算法(如pid算法)计算数字占空比信号d[k],然后通过数字脉冲宽度调制器(dpwm:digital pulse width modulation)将该数字占空比信号d[k]转换为模拟占空比信号d(t),最后经gate driver驱动功率级开关s
p
和s
n
的导通或关闭,以调节输出电压v
out
(t)使其稳定于基准电压v
ref
。
[0003]
针对数字电源的控制算法,传统的pid控制算法基于线性小信号模型,采用固定的增益与控制系数,具有结构简单、易于实现的优点,但电源的瞬态性能较差。非线性控制与pid控制相结合的控制算法,如模糊pid控制、神经网络pid控制,具有较好的稳态和瞬态性能。但是,模糊pid控制的自适应性受限于模糊子集的数量,虽然增加模糊子集的数量可以提高控制的自适应性,但是所需的硬件资源大大增加。神经网络pid控制通常是基于数据驱动的,理论上当训练数据足够多时能满足各个工作点的需求,自适应性强。但是,神经网络pid控制仍然是基于pid控制的固定结构,无法克服pid控制中始终存在的积分项和微分项对电源瞬态响应的影响。
[0004]
文献“improvement of compensation effect of neural network prediction for digitally controlled dc
‑
dc converter,2015ieee international telecommunications energy conference”和“a reference modification model digitally controlled dc
–
dc converter for improvement of transient response,ieee trans.on power elec.,vol.31,no.1,jan.2016”,相继提出了一种应用于数字电源的神经网络pid控制器,神经网络采用在线训练的方式,根据数字电源的状态变量实时调整pid控制器的控制系数(k
p
,k
i
,k
d
)和基准电压v
ref
,有效地提升了数字电源的瞬态性能。但是受限于神经网络pid控制器的固定结构,无法实现控制器的结构和控制参数可重构,因此难以消除积分项和微分项对电源瞬态响应的影响,限制了瞬态性能的进一步提升。
技术实现要素:
[0005]
要解决的技术问题
[0006]
针对现有pid控制器中积分项和微分项对控制性能的影响,以提高数字电源的瞬态性能。本发明提出一种基于bp神经网络的自适应可重构p
‑
i
‑
d控制器。该控制器不仅可实现控制系数的自适应调整,还可实现控制器结构的实时可重构。有效地减小了数字电源的扰动恢复时间和超调量,瞬态性能得到显著提升。
[0007]
技术方案
[0008]
一种基于bp神经网络的自适应可重构比例
‑
积分
‑
微分控制器,其特征在于包括bp神经网络、逻辑运算单元以及可重构控制单元;所述的逻辑运算单元对输出电压进行延迟运算以及加减运算,产生当前周期、前一、二个周期的电压误差以及当前周期的电压误差变化率;所述的可重构控制单元根据输出电压的实时变化状态自适应地切换bp神经网络的pi、pd、pid三种控制方式下的控制参数以实现控制方式的可重构;所述的bp神经网络根据输入电压、电感电流以及电压误差变化率,产生数字占空比以调节输出电压使其稳定于基准电压。
[0009]
所述的可重构控制单元包括存储pi、pd和pid控制参数的查找表lut、多路选择器以及时序控制模块;所述的时序控制模块根据输出电压的状态变量产生多路选择器的控制信号;所述的查找表lut存储神经网络的pi、pd和pid控制参数;所述的多路选择器根据控制信号切换bp神经网络的控制参数以实现控制方式重构。
[0010]
所述的bp神经网络采用单隐含层的神经网络,其结构为6
‑
10
‑
1,即输入节点为6个,隐含节点为10个,输出节点为1个,然后用三组数据采用线下训练的方式,通过梯度下降法分别训练神经网络,得到三组权值和偏置,分别代表pi、pd、pid三种控制方式的控制参数,将训练好的三组控制参数存入查询表中备用。
[0011]
一种可重构比例
‑
积分
‑
微分控制器的自适应方法,其特征在于:所述控制器状态切换共有6种情况,在pi、pd和pid之间相互切换,其具体的状态切换时序设计如下:
[0012]
(1)从pi控制切换到pd控制,表示数字电源从稳态进入瞬态,控制器需要切换到pd控制以调节输出电压,使其快速逼近基准电压;此时的触发条件
①
是
[0013][0014]
(2)从pd控制切换到pid控制,表示pd控制到达极限,无法继续减小电压误差,控制器需要从pd控制切换到pid控制以消除电压误差,此时的触发条件
②
是
[0015]
e
o
[k]=e
o
[k
‑
1]≠0
[0016]
(3)从pid控制切换到pi控制,表示数字电源的瞬态调节完成,进入稳态,控制器仅需pi控制就能维持稳态输出,此时的触发条件
③
是
[0017]
e
o
[k]=e
o
[k
‑
1]=0,
[0018]
(4)从pd控制切换到pi控制,表示数字电源将由瞬态进入稳态,并且在瞬态时,pd控制恰好完全消除了电压误差,输出电压稳定于基准电压;此时触发条件
④
是
[0019]
e
o
[k]=e
o
[k
‑
1]=0
[0020]
(5)从pi控制切换到pid控制,同样表示数字电源从稳态进入瞬态,与pi控制切换到pd控制不同的是,前者扰动较小,仅需要pid控制即可快速地调节完成,而后者通常扰动较大,输出电压偏离基准电压较多,控制器需要先切换到pd控制以使输出电压快速逼近基准电压,然后采用pid消除电压误差;因此从pi控制切换到pid控制的触发条件
⑤
是
[0021]
e
oc
[k]<e
oc
[k
‑
1]
[0022]
(6)从pid控制切换到pd控制,表示数字电源的一个扰动调节未完成又来了一个新的扰动,即扰动的叠加;原本在pid控制的调节下,电压误差逐渐减小,突然又来新的扰动,电压误差再次增大,控制器需要从原来的pid控制切换到pd控制以快速减小电压误差,因此
触发条件
⑥
是
[0023]
{e
o
[k]>e
o
[k
‑
1]}||{e
o
[k]=e
o
[k
‑
1]≠0}。
[0024]
有益效果
[0025]
与现有技术相比,本发明提出的基于神经网络的自适应可重构p
‑
i
‑
d控制器是数据驱动的,能满足各个工作点的需求。基于数据驱动的神经网络控制器不仅具有控制系数的自适应性,还能根据输出电压的状态在pi、pd、pid三种控制方式之间自适应地切换,以实现比例
‑
积分
‑
微分控制器结构的实时可重构。采用本发明提出的基于bp神经网络的自适应可重构p
‑
i
‑
d控制器,减小了pid控制器中积分项和微分项对电源瞬态性能的影响,有效提高了数字电源的瞬态性能。
附图说明
[0026]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0027]
图1本发明提出的基于bp神经网络的自适应可重构p
‑
i
‑
d控制器;
[0028]
图2本发明提出的控制器的可重构机制;
[0029]
图3本发明提出的可重构控制器在负载扰动时的工作原理;
[0030]
图4神经网络参数的获取流程;
[0031]
图5本发明采用的神经网络硬件电路架构:(a)神经网络的归一化模块;(b)bp神经网络输入层到隐含层的电路;(c)隐含层到输出层的电路;
[0032]
图6采用本发明技术与现有神经网络
‑
pid(nn
‑
pid)技术的数字电源瞬态性能对比:(a)启动状态;(b)负载电流从1.2a突变到0.2a;(c)负载电流从0.2a突变到1.2a;(d)输入电压从5.0v突变到6.0v;(e)输入电压从5.0v突变到4.0v;
[0033]
图7数字控制dc
‑
dc开关变换器(简称为数字电源)的结构。
具体实施方式
[0034]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0035]
参照附图1,本发明提出的基于bp神经网络的自适应可重构p
‑
i
‑
d控制器,由bp神经网络、逻辑运算单元以及可重构控制单元组成,其中可重构控制单元由存储pi、pd和pid控制参数的查找表(lut)、多路选择器以及时序控制模块组成。基于bp神经网络的自适应可重构p
‑
i
‑
d控制器的输入信号是{v
out
[k],i
ind
[k],v
in
[k]},其中v
out
[k]是当前周期的输出电压,i
ind
[k]为当前周期的电感电流,v
in
[k]为当前周期的输入电压,输出信号是数字占空比d
nn
[k]。逻辑运算单元对输出电压v
out
[k]进行延迟运算以及加减运算,产生{e
o
[k],e
oc
[k],e
o
[k
‑
1],e
o
[k
‑
2]},其中e
o
[k]是当前周期的电压误差,e
o
[k
‑
1]和e
o
[k
‑
2]分别是前一、二个周期的电压误差,e
oc
[k]=e
o
[k]
‑
e
o
[k
‑
1],是当前周期的电压误差变化率。可重构控制单元根据输出电压的实时变化状态自适应地切换神经网络的控制参数以实现控制方式的可重构。其中时序控制模块根据输出电压的状态变量{e
o
[k],e
oc
[k]}产生多路选择器的控制信
号ctrl。查找表存储神经网络的三组权值和偏置,即pi、pd和pid控制参数。多路选择器根据控制信号ctrl切换bp神经网络的权值和偏置以实现控制方式重构。bp神经网络根据输入电压v
in
、电感电流i
ind
以及电压误差信息{e
o
[k],e
o
[k
‑
1],e
o
[k
‑
2],e
oc
[k]},产生数字占空比d
nn
[k]以调节输出电压。时序控制模块具体的设计过程如下:
[0036]
1.神经网络参数的获取。神经网络参数的获取流程如附图4所示,首先分别采集三种控制方式(pi、pd、pid)的数据,即所提出控制器的输入信息{v
in
,i
ind
,e
o
[k],e
o
[k
‑
1],e
o
[k
‑
2],e
oc
[k]}以及输出信息{d
nn
[k]}。为了避免数据的不同维度对神经网络控制精度的影响,对采集的数据进行归一化处理。输入信号x
m
[k](m=1,
…
,6)归一化的算法如下:
[0037][0038]
本发明中,采用单隐含层的神经网络,其结构为6
‑
10
‑
1,即输入节点为6个,隐含节点为10个,输出节点为1个。然后用三组数据采用线下训练的方式,通过梯度下降法分别训练神经网络,得到三组权值和偏置,分别代表pi、pd、pid三种控制方式的控制参数,将训练好的三组控制参数存入查询表中备用。然后搭建电路如附图5所示,其中附图5a为神经网络的归一化模块,附图5b为bp神经网络输入层到隐含层的电路,附图5c为隐含层到输出层的电路。
[0039]
2.可重构控制器的设计。可重构控制器根据输出电压的状态自适应地切换神经网络的控制参数,主要用于选择神经网络的控制参数,从而实现控制方式的可重构。如附图1所示,可重构控制器由查找表(lut)、多路选择器和时序控制模块组成。可重构的控制状态如附图2所示。在电源的启动阶段或瞬态相应的初始阶段,由于输出电压偏离基准电压较多,可重构控制器首先选择pd控制参数以实现pd控制,从而使输出电压快速逼近基准电压(pd控制参数,是指神经网络在pd控制的数据下训练出来的参数,pi控制参数以及pid控制参数同理)。控制器维持在pd控制的条件如下:
[0040]
{e
o
[k]≠e
o
[k
‑
1]}&{e
o
[k]>e
pd
[k]}&{e
o
[k
‑
1]>e
pd
[k]},
ꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0041]
表示在pd控制方式下,电压误差一直在变化,这意味着pd控制没有到达极限,仍能继续减小电压误差。其中,e
o
[k]为当前周期的电压误差,e
o
[k
‑
1]为前一周期的电压误差,e
pd
[k]表示pd控制到达极限时未能消除的电压误差。
[0042]
由于pd控制无法完全消除电压误差,当pd控制无法继续减小电压误差时,可重构控制器输出pid控制参数,实现pid控制以消除电压误差,控制器维持在pid控制的条件是:
[0043]
{e
o
[k]≠e
o
[k
‑
1]}&{0<e
o
[k]<e
pd
[k]}&{0<e
o
[k
‑
1]<e
pd
[k]},
ꢀꢀꢀꢀꢀ
(5)
[0044]
同样表示电压误差一直在变化,这意味着电压误差还没有被完全消除。
[0045]
当电压误差消除后,此时输出电压等于基准电压,控制器切换到pi控制,进入稳态,维持输出电压稳定于基准电压。在稳态时,神经网络采用pi控制参数实现pi控制,从而维持输出电压稳定于基准电压。其中控制器维持pi控制的条件是:
[0046]
{e
oc
[k]=e
oc
[k
‑
1]=0}&{e
o
[k]=0},
ꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0047]
表示电压误差的变化率始终为零、且电压误差也为零,此时输出电压稳定于基准电压。其中,eoc[k]表示当前周期的误差变化率,eoc[k
‑
1]表示前一周期的误差变化率。
[0048]
所述控制器状态切换共有6种情况,在pi、pd和pid之间相互切换,其具体的状态切
换时序设计如下:
[0049]
(1)从pi控制切换到pd控制,表示数字电源从稳态进入瞬态,控制器需要切换到pd控制以调节输出电压,使其快速逼近基准电压。此时的触发条件
①
是
[0050][0051]
其中e
oc
[k]>e
oc
[k
‑
1]表示表示输出电压偏离基准电压的速度越来越快;e
oc
[k]=e
oc
[k
‑
1]≠0表示输出电压正匀速偏离基准电压;e
oc
[k]=e
oc
[k
‑
1]≠0且e
o
[k]=e
o
[k
‑
1]≠0表示输出电压偏离基准电压,不再变化。
[0052]
(2)从pd控制切换到pid控制,表示pd控制到达极限,无法继续减小电压误差,控制器需要从pd控制切换到pid控制以消除电压误差,此时的触发条件
②
是
[0053]
e
o
[k]=e
o
[k
‑
1]≠0,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0054]
表示电压误差不再继续减小,即pd控制到达极限。
[0055]
(3)从pid控制切换到pi控制,表示数字电源的瞬态调节完成,进入稳态,控制器仅需pi控制就能维持稳态输出,此时的触发条件
③
是
[0056]
e
o
[k]=e
o
[k
‑
1]=0,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0057]
即电压误差和误差变化率均为0,表示输出电压已稳定于基准电压。
[0058]
(4)从pd控制切换到pi控制,表示数字电源将由瞬态进入稳态,并且在瞬态时,pd控制恰好完全消除了电压误差,输出电压稳定于基准电压。此时触发条件
④
是
[0059]
e
o
[k]=e
o
[k
‑
1]=0,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0060]
同pid控制切换到pi控制的触发条件相同。
[0061]
(5)从pi控制切换到pid控制,同样表示数字电源从稳态进入瞬态,与pi控制切换到pd控制不同的是,前者扰动较小,仅需要pid控制即可快速地调节完成,而后者通常扰动较大,输出电压偏离基准电压较多,控制器需要先切换到pd控制以使输出电压快速逼近基准电压,然后采用pid消除电压误差。因此从pi控制切换到pid控制的触发条件
⑤
是
[0062]
e
oc
[k]<e
oc
[k
‑
1],
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0063]
表示误差变化率逐渐减小,即输出电压偏离基准电压的速度越来越慢。
[0064]
(6)从pid控制切换到pd控制,表示数字电源的一个扰动调节未完成又来了一个新的扰动,即扰动的叠加。原本在pid控制的调节下,电压误差逐渐减小,突然又来新的扰动,电压误差再次增大,控制器需要从原来的pid控制切换到pd控制以快速减小电压误差,因此触发条件
⑥
是
[0065]
{e
o
[k]>e
o
[k
‑
1]}||{e
o
[k]=e
o
[k
‑
1]≠0},
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0066]
其中e
o
[k]>e
o
[k
‑
1]表示电压误差逐渐增大,即输出电压正偏离基准电压;e
o
[k]=e
o
[k
‑
1]≠0表示输出电压偏离基准电压,且不再变化。
[0067]
实施例:
[0068]
这里以负载扰动为例,说明可重构控制的工作原理以及时序控制。如附图3所示,当负载电流突变时,输出电压偏离基准电压,一旦满足触发条件
①
,如(1)式所示,神经网络由pi控制切换到pd控制以使输出电压尽快逼近基准电压。
[0069][0070]
其中,e
oc
[k]>e
oc
[k
‑
1]表示输出电压偏离基准电压的速度越来越快;e
oc
[k]=e
oc
[k
‑
1]≠0表示输出电压正匀速偏离基准电压;e
oc
[k]=e
oc
[k
‑
1]≠0且e
o
[k]=e
o
[k
‑
1]≠0表示输出电压偏离基准电压,不再变化。
[0071]
随着电压误差的逐渐减小,当电压误差满足触发条件
②
,如(2)式所示,表示pd控制到达极限,无法继续消除电压误差,此时神经网络由pd控制切换至pid控制,以消除电压误差并减小扰动恢复时间。
[0072]
e
o
[k]=e
o
[k
‑
1]≠0,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0073]
当e[k]=e[k
‑
1]=0,即满足触发条件
③
,表示输出电压的稳态误差被消除,神经网络由pid控制切换至pi控制以维持稳态。
[0074]
针对buck型数字电源,附图6分别是采用本发明技术和现有神经网络
‑
pid(nn
‑
pid)控制技术在启动状态、负载电流跳变
±
1a和输入电压跳变
±
1v时的数字电源的瞬态响应曲线对比,与现有技术相比,采用本发明提出的基于神经网络的自适应可重构p
‑
i
‑
d控制器的数字电源,其扰动恢复时间和超调量均显著减小,瞬态响应性能得到显著提升。
[0075]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。