1.本发明属于医疗器械领域,涉及一种动力输出位置调节机构;
2.还涉及一种具有动力输出位置调节机构的组织旋切活检驱动手柄。
背景技术:
3.活检旋切手术中,要求活检针管做多种运动才能满足临床各种手术需求,如旋切运动中的前后移动和转向调节等。
4.现有技术中,每种运动采用一个动力电机单独驱动实现,误差大,不便于由电机驱动的主动齿轮组件与活检针的被动齿轮组件啮合,同时,增多了电机即增加了成本,又增大了驱动手柄的体积重量,降低了临床应用中的操控性。
5.针对现有技术中存在的缺陷,亟需设计一种改进的驱动手柄,以解决现有技术中驱动手柄误差大、体积重量过大、临床应用中操控性低的问题。
技术实现要素:
6.本发明的目的在于克服上述现有技术的不足,提供了一种动力输出位置调节机构,可在不同位置输出所需动力;还提供了一种具有动力输出位置调节技术的组织旋切活检驱动手柄,只需一个电机即可在不同位置输出对应动力参数的运动,从而满足了组织旋切活检术时活检针所要求的驱动需求,实现了各种临床使用功能需求,又节约了成本,减小了组织旋切活检驱动手柄的体积重量,提高了临床应用中的操控性。
7.本发明是这样实现的,一种动力输出位置调节机构,包括:
8.齿轮组件,用于输出动力;
9.平移电机,用于驱动所述齿轮组件轴向移动;
10.检测电路,用于获取所述齿轮组件的位置信号;
11.平移电机驱动电路,用于控制所述平移电机;
12.控制芯片,根据所述检测电路反馈的所述齿轮组件的位置信号并控制所述平移电机驱动电路以使所述平移电机工作,所述平移电机驱动所述齿轮组件轴向精准移至不同的预设位置,进而使所述齿轮组件可在不同的预设位置输出所需动力。
13.具体地,所述检测电路包括:
14.至少一复位开关,所述复位开关用于控制所述检测电路的通电或断电,当所述平移电机驱动所述齿轮组件移至起始点时与所述复位开关接触,以使所述检测电路处于通电状态,用于确定所述齿轮组件的位置。
15.本发明提供的一种动力输出位置调节机构,包括输出动力的齿轮组件、驱动齿轮组件轴向移动的平移电机、控制平移电机工作的平移电机驱动电路、获取齿轮组件位置信号的检测电路、接收检测电路反馈信号的控制芯片。控制芯片根据检测电路反馈的齿轮组件位置信号,控制平移电机驱动电路使平移电机工作,以驱动齿轮组件轴向精准移至不同的预设位置,从而使齿轮组件可在不同位置输出所需动力。
16.本发明还提供了一种组织旋切活检驱动手柄,包括旋转电机和具有外刀管和内刀管的活检针以及控制所述旋转电机的旋转电机驱动电路,所述内刀管滑动穿设于所述外刀管内,还包括以上所述的动力输出位置调节机构,所述旋转电机驱动电路精准控制所述旋转电机驱动不同位置的所述齿轮组件旋转以使所述内刀管相对所述外刀管移动和/或旋转。
17.具体地,旋转电机驱动电路包括:
18.半桥模块,用于控制所述旋转电机驱动与活检针啮合的所述齿轮组件;
19.驱动芯片,根据控制器输出的信号控制所述半桥模块;
20.电流采集模块,用于采集所述旋转电机的电流;
21.检测模块,用于将所述电流采集模块采集的旋转电机电流信号反馈至控制器;
22.控制器,根据所述检测模块馈送的旋转电机电流信号,调节输入至所述驱动芯片中的pwm驱动信号的占空比,从而使所述半桥模块输出驱动所述旋转电机的稳定电流。
23.具体地,所述半桥模块包括:
24.用于驱动所述旋转电机的mos管模组,所述mos管模组包括第一mos管、第二mos管、第三mos管、第四mos管、第五mos管和第六mos管,其中,两个mos管为一组分别用于与所述旋转电机的三相接线端连接;
25.多个用于滤除杂波和起到保护作用的滤波单元和多个保护单元,各所述滤波单元和各所述保护单元分别并联连接于所述第一mos管、第二mos管、第三mos管、第四mos管、第五mos管和第六mos管的漏极和源极之间。
26.具体地,所述半桥模块还包括分别控制所述第一mos管、第二mos管、第三mos管、第四mos管、第五mos管和第六mos管导通时间的控制单元。
27.具体地,所述电流采集模块包括分别用于采集旋转电机的a相电流、b相电流和c相电流的采样单元。
28.具体地,所述检测模块包括多个检测单元,分别用于将采集的a相电流值、b相电流值和c相电流值反馈给控制器。
29.具体地,所述不同的预设位置包括至少两个预设位置,所述齿轮组件移至其中一个预设位置用于驱动所述内刀管旋转,所述齿轮组件移至另一个预设位置用于驱动所述内刀管旋转和轴向移动。
30.进一步地,不同的预设位置还包括第三个预设位置,所述齿轮组件移至所述第三个预设位置用于驱动所述外刀管旋转。
31.本发明还提供了一种具有动力输出位置调节机构的组织旋切活检驱动手柄,只需一个旋转电机驱动齿轮组件工作即可在不同位置输出对应动力参数的运动,从而满足了组织旋切活检术时活检针所要求的驱动需求,实现了各种临床使用功能需求,又节约了成本,减小了组织旋切活检驱动手柄的体积重量,提高了临床应用中的操控性。
附图说明
32.为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
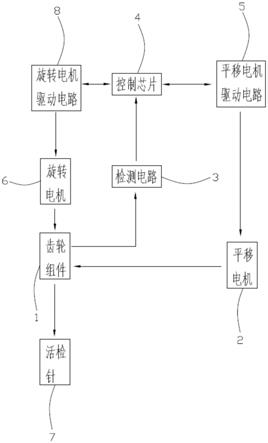
33.图1是本发明实施例提供的组织旋切活检驱动手柄的框图。
34.图2是本发明实施例提供的组织旋切活检驱动手柄中动力输出位置调节机构的齿轮组件、平移电机和复位开关安装在一起的剖面示意图。
35.图3是本发明实施例提供的动力输出位置调节机构中检测电路和控制芯片的原理图。
36.图4是本发明实施例提供的动力输出位置调节机构中平移电机驱动电路的原理图。
37.图5是本发明实施例提供的组织旋切活检驱动手柄中旋转电机驱动电路的原理图。
38.图6是本发明实施例提供的组织旋切活检驱动手柄中旋转电机驱动电路的框图。
39.图7是本发明实施例提供的组织旋切活检驱动手柄中齿轮组件移至第一预设位置的示意图(即用于驱动外刀管旋转)。
40.图8是本发明实施例提供的组织旋切活检驱动手柄中齿轮组件移至第二预设位置的示意图(即用于驱动内刀管旋转)。
41.图9是本发明实施例提供的组织旋切活检驱动手柄中齿轮组件移至第三预设位置的示意图(即用于驱动内刀管旋转和轴向移动)。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
43.如图1~图4所示,本发明实施例提供的一种动力输出位置调节机构,包括:
44.齿轮组件1,用于输出动力,本实施例中齿轮组件1即可轴向移动,又可旋转;
45.至少一平移电机2,用于驱动齿轮组件1轴向移动,本实施例中平移电机2为一个;
46.检测电路3,用于获取所述齿轮组件1的位置信号;
47.平移电机驱动电路5,用于控制平移电机2;
48.控制芯片4,根据检测电路3反馈的齿轮组件1的位置信号并控制平移电机驱动电路5使所述平移电机2工作,平移电机2驱动齿轮组件1轴向精准移至不同的预设位置,以使齿轮组件1可在不同的预设位置输出所需动力。
49.具体地,所述检测电路3包括:
50.至少一复位开关31,所述复位开关31用于控制所述检测电路3的通电或断电,当平移电机2驱动齿轮组件1移至起始点时与复位开关3接触,以使检测电路3处于通电状态,用于确定齿轮组件1的位置;
51.第一电阻r1,所述第一电阻r1一端用于与供电端连接,第一电阻r1的另一端分别与控制芯片4的信号输入接口a5和复位开关31的一端连接,复位开关31的另一端接地,当复位开关31闭合后形成通电回路,以使控制芯片4及时接收到齿轮组件1的当前位置信号;
52.第一电容c1,所述第一电容c1的一端与第一电阻r1的另一端连接,第一电容c1的另一端接地,第一电阻r1起上拉作用,第一电容c1起滤波作用。
53.具体地,所述控制芯片4包括:
54.信号输入接口a5,用于与检测电路3的输出端连接;
55.故障信号输入端,用于与平移电机驱动电路5的报警单元56连接,故障信号输入端包括第一故障信号输入接口b8和第二故障信号输入接口b9;
56.信号输出端,与平移电机驱动电路5的输入端连接,信号输出端包括第一信号输出接口a8、第二信号输出接口b13、第三信号输出接口a9和第四信号输出接口a14。
57.具体地,所述平移电机驱动电路5包括驱动芯片50,驱动芯片50包括:
58.供电单元51,用于给平移电机驱动电路5供电;
59.信号输入单元52,用于接收信号输出端输出的信号;
60.驱动电源单元53,用于给平移电机驱动电路5提供驱动平移电机2工作的电源;
61.信号输出单元54,用于输出控制平移电机2驱动齿轮组件1轴向移动的控制信号;
62.限流单元55,用于对信号输出单元54限流;
63.报警单元56,用于与故障信号输入端连接,当平移电机驱动电路5发生故障时发出报警信号。
64.具体地,所述供电单元51包括:
65.vdd端以及分别与vdd端并联连接的第二电容c2和第三电容c3,第二电容c2和第三电容c3分别接地。
66.具体地,所述信号输入单元52包括:
67.ain1端,用于与第一信号输出接口a8连接;
68.ain2端,用于与第二信号输出接口b13连接;
69.bin1端,用于与第三信号输出接口a9连接;
70.bin2端,用于与第四信号输出接口a14连接。
71.具体地,所述驱动电源单元53包括:
72.bst端、vin端和第四电容c4,第四电容c4的一端与bst端连接,第四电容c4的另一端分别与vin端、第五电容c5的一端、第六电容c6的一端和磁珠fb1的一端连接,第五电容c5和第六电容c6的另一端分别接地,磁珠fb1的另一端与12v供电端连接。
73.具体地,所述信号输出单元54包括:分别与平移电机2连接的aout1端、aout2端、bout1端和bout2端。
74.具体地,所述限流单元55包括:第一限流单元551和第二限流单元552;
75.所述第一限流单元551包括:用于对aout1端和aout2端限流的第二电阻r2和sena端,第二电阻r2一端与sena端连接,第二电阻r2另一端接地;
76.所述第二限流单元552包括:senb端和用于对bout1端和bout2端限流的第三电阻r3,第三电阻r3一端与senb端连接,第三电阻r3另一端接地。
77.具体地,所述报警单元56包括:
78.fault端,用于与第一故障信号输入接口b8连接;
79.nsleep端,用于与第二故障信号输入接口b9连接。
80.本发明提供的一种动力输出位置调节机构,包括输出动力的齿轮组件1、驱动齿轮组件1轴向移动的平移电机2、控制平移电机2工作的平移电机驱动电路5、获取齿轮组件1位置信号的检测电路3、接收检测电路3反馈信号的控制芯片4。控制芯片4根据检测电路3反馈的齿轮组件位置信号,控制平移电机驱动电路5使平移电机2工作,以驱动齿轮组件1轴向精准移至不同的预设位置,从而使齿轮组件1可在不同位置输出所需动力。
81.如图1所示,本发明实施例提供的一种组织旋切活检驱动手柄,包括至少一旋转电机6和具有外刀管71和内刀管72的活检针7以及控制旋转电机6的旋转电机驱动电路8,内刀管72滑动穿设于外刀管71内,还包括以上所述的动力输出位置调节机构,旋转电机驱动电路8精准控制旋转电机6驱动不同位置的齿轮组件1旋转以使内刀管72相对外刀管71移动和/或旋转。
82.本实施例中,旋转电机6的数量为一个。
83.只需一个旋转电机6驱动齿轮组件1工作即可在不同位置输出对应动力参数的运动,从而满足了组织旋切活检术时活检针7所要求的驱动需求,实现了各种临床使用功能需求,又节约了成本,减小了手持式组织旋切活检驱动手柄的体积重量,提高了临床应用中的操控性。
84.如图5和图6所示,旋转电机驱动电路8,包括:
85.半桥模块81,用于控制旋转电机6驱动与活检针7啮合的齿轮组件1;
86.驱动芯片82,根据控制器83输出的信号控制半桥模块81,该信号包括六路pwm控制信号和驱动使能信号;
87.电流采集模块84,用于采集旋转电机6的电流;
88.检测模块85,用于将电流采集模块84采集的旋转电机电流信号反馈至控制器83;
89.控制器83,根据检测模块85馈送的旋转电机电流信号,调节输入至驱动芯片中的pwm驱动信号的占空比,从而使半桥模块81输出驱动旋转电机6的稳定电流;
90.参数设置模块86,用于对所述驱动芯片82进行参数配置。
91.具体地,所述驱动芯片82包括信号接收端,信号接收端包括:
92.enable端,用于接收控制器83输出的驱动使能信号;
93.inha端和inla端,用于接收控制器83输出的a相pwm信号;
94.inhb端和inlb端,用于接收控制器83输出的b相pwm信号;
95.inhc端和inlc端,用于接收控制器83输出的c相pwm信号;
96.多个滤波电阻r,设于驱动芯片82外围并分别连接于enable端、inha端、inla端、inhb端、inlb端、inhc端、inlc端与控制器83之间。
97.具体地,所述驱动芯片82还包括驱动单元,驱动单元包括第一半桥栅极驱动单元、第二半桥栅极驱动单元和第三半桥栅极驱动单元;
98.第一半桥栅极驱动单元包括:
99.gha端和sha端,用于发出a相上桥臂mos管驱动信号;
100.gla端,用于发出a相下桥臂mos管驱动信号;
101.第二半桥栅极驱动单元包括:
102.ghb端和shb端,用于发出b相上桥臂mos管驱动信号;
103.glb端,用于发出b相下桥臂mos管驱动信号;
104.第三半桥栅极驱动单元包括:
105.ghc端和shc端,用于发出c相上桥臂mos管驱动信号;
106.glc端,用于发出c相下桥臂mos管驱动信号。
107.具体地,所述半桥模块81包括:
108.用于驱动旋转电机6的mos管模组,mos管模组包括第一mos管q1、第二mos管q2、第
三mos管q3、第四mos管q4、第五mos管q5和第六mos管q6,第一mos管q1、第二mos管q2、第三mos管q3、第四mos管q4、第五mos管q5和第六mos管q6均采用24v供电。
109.具体地,本实施例中,两个相互串接的mos管组成一mos管组,每组mos管组中的两个mos管分别与旋转电机6的三相绕组中的一相绕组连接,通过每组mos管的导通或关断,可使半桥模块81输出驱动旋转电机6的稳定电流。
110.本实施例中,旋转电机6的三相接线端包括第一接线端(u)、第二接线端(v)和第三接线端(w),其中,第一mos管q1和第二mos管q2分别与旋转电机6的第一接线端(u)连接,第三mos管q3和第四mos管q4分别与旋转电机6的第二接线端(v)连接,第五mos管q5和第六mos管q6分别与旋转电机6的第三接线端(w)连接。
111.更具体地,所述第一mos管q1的漏极d用于与24v供电端连接,第一mos管q1的栅极g与gha端连接,第一mos管q1的源极s和第二mos管q2的漏极d分别与sha端和旋转电机6的u极连接,第二mos管q2的栅极g和源极s分别与gla端连接,第二mos管q2的源极s还分别与spa端和sna端连接。
112.当enanle端输入低电平时,gha端和gla端输出低电平,pwm被封锁,第一mos管q1和第二mos管q2断开;当enanle端输入高电平时,gha端和gla端输出放大的inha和inla信号,第一mos管q1和第二mos管q2根据inha和inla信号电平状态导通或关断;
113.所述第三mos管q3和第四mos管q4,第三mos管q3的漏极d用于与24v供电端连接,第三mos管q3的栅极g与ghb端连接,第三mos管q3的源极s与第四mos管q4的漏极d分别与shb端和旋转电机6的v极连接,第四mos管q4的栅极d和源极s分别与glb端连接,第四mos管q4的源极s还分别与spb端和snb端连接;
114.当enbnle端输入低电平时,ghb端和glb端输出低电平,pwm被封锁,第三mos管q3和第四mos管q4断开;当enbnle端输入高电平时,ghb端和glb端输出放大的inhb和inlb信号,第三mos管q3和第四mos管q4根据inhb和inlb信号电平状态导通或关断;
115.所述第五mos管q5和第六mos管q6,第五mos管q5的漏极d用于与24v供电端连接,第五mos管q5的栅极g与ghc端连接,第五mos管q5的源极s与第六mos管q6的漏极d分别与shc端和旋转电机6的w极连接,第六mos管q6的栅极g和源极s分别与glc端连接,第六mos管q6的源极s还分别与spc端和snc端连接;
116.当encnle端输入低电平时,ghc端和glc端输出低电平,pwm被封锁,第五mos管q5和第六mos管q6断开;当encnle端输入高电平时,ghc端和glc端输出放大的inhc和inlc信号,第五mos管q5和第六mos管q6根据inhc和inlc信号电平状态导通或关断。
117.具体地,半桥模块81还包括:
118.多个滤波单元811和多个保护单元812,各滤波单元811和各保护单元812分别并联连接于第一mos管q1、第二mos管q2、第三mos管q3、第四mos管q4、第五mos管q5和第六mos管q6的漏极d和源极s之间,用于滤除杂波和起到保护的作用;
119.各所述滤波单元811包括:第四电阻r4和第七电容c7,第四电阻r4一端分别与每个mos管的漏极连接、第四电阻r4另一端与第七电容c7一端连接,第七电容c7另一端与每个mos管的源极连接;
120.各所述保护单元812均为二极管d,二极管d一端与每个mos管的漏极连接、另一端与每个mos管的源极连接。
121.进一步地,所述半桥模块81还包括分别控制第一mos管q1、第二mos管q2、第三mos管q3、第四mos管q4、第五mos管q5和第六mos管q6导通时间的控制单元813;
122.每个所述控制单元813均包括第五电阻r5和第八电容c8,第五电阻r5的一端与驱动芯片82连接、另一端分别与mos管的栅极g和第八电容c8的一端连接,第八电容c8的另一端与mos管的源极s连接。
123.更具体地,所述控制单元813包括第一控制单元813、第二控制单元813、第三控制单元813、第四控制单元813、第五控制单元813和第六控制单元813。
124.所述第一控制单元813,用于控制第一mos管q1的导通时间,第一控制单元813包括第五电阻r5和第八电容c8,第五电阻r5一端与gha端连接,第五电阻r5另一端分别与第一mos管q1的栅极和第八电容c8的一端连接,第八电容c8的另一端分别与sha端、第一mos管q1的源极s和第二mos管q2的漏极d连接;
125.所述第二控制单元813,用于控制第二mos管q2的导通时间,第二控制单元813包括第五电阻r5和第八电容c8,第五电阻r5一端与gla端连接,第五电阻r5另一端分别与第二mos管的栅极g和第八电容c8的一端连接,第八电容c8的另一端与第二mos管的源极s连接;
126.所述第三控制单元813,用于控制第三mos管的导通时间,第三控制单元813包括第五电阻r5和第八电容c8,第五电阻r5一端与ghb端连接,第五电阻r5另一端分别与第三mos管的栅极g和第八电容c8的一端连接,第八电容c8的另一端分别与shb端、第三mos管的源极s和第四mos管的漏极d连接;
127.所述第四控制单元813,用于控制第四mos管的导通时间,第四控制单元813包括第五电阻r5和第八电容c8,第五电阻r5一端与glb端连接,第五电阻r5另一端分别与第四mos管的栅极g和第八电容c8的一端连接,第八电容c8的另一端与第四mos管的源极s连接;
128.所述第五控制单元813,用于控制第五mos管的导通时间,第五控制单元813包括第五电阻r5和第八电容c8,第五电阻r5一端与ghc端连接,第五电阻r5另一端分别与第五mos管的栅极g和第八电容c8的一端连接,第八电容c8的另一端分别与shc端、第五mos管的源极s和第六mos管的漏极d连接;
129.所述第六控制单元813,用于控制第六mos管的导通时间,第六控制单元813包括第五电阻r5和第八电容c8,第五电阻r5一端与glc端连接,第五电阻r5另一端分别与第六mos管的栅极g和第八电容c8的一端连接,第八电容c8的另一端与第六mos管的源极s连接。
130.进一步地,所述电流采集模块84包括分别用于采集旋转电机的a相电流、b相电流和c相电流的采样单元,采样单元为第六电阻r6。
131.所述驱动芯片82还包括与电流采集模块84连接的多个采样接口,多个采样接口为spa端、sna端、spb端、snb端、spc端和snc端;
132.采样单元包括第一采样单元、第二采样单元和第三采样单元。
133.所述spa端和sna端分别与第一采样单元连接,用于采集旋转电机的a相电流;
134.具体地,第一采样单元为第六电阻r6,第六电阻r6一端连接于sna端、另一端分别与spa端和第二mos管q2连接;
135.所述spb端和snb端分别与第二采样单元用于采集旋转电机的b相电流。
136.具体地,第二采样单元为第六电阻r6,第六电阻r6一端连接于snb端、另一端分别与spb端和第四mos管q4连接;
137.所述spc端和snc端分别与第三采样单元用于采集旋转电机的c相电流。
138.具体地,第三采样单元为第六电阻r6,第六电阻r6一端连接于snc端、另一端分别与spc端和第六mos管q6连接。
139.具体地,所述检测模块85包括:
140.供电电源端,优选为3.3v供电,用于给驱动芯片82提供基准电压;
141.多个检测单元,分别用于将采集的a相电流值、b相电流值和c相电流值反馈给控制器83。
142.进一步地,所述驱动芯片3还包括与检测模块85连接的多个检测接口,多个检测接口为vref端、soa端sob端和soc端。
143.具体地,vref端用于与3v供电端连接并接地。
144.具体地,多个所述检测单元包括第一检测单元、第二检测单元和第三检测单元。
145.所述第一检测单元,用于将采集的a相电流值反馈给控制器83处理。
146.具体地,第一检测单元包括第十一电阻r11和第九电容c9,soa端与第十一电阻r11的一端连接,第十一电阻r11的另一端分别用于与控制器83的isena端和第九电容c9的一端连接,第九电容c9的另一端接地;
147.所述第二检测单元,用于将采集的b相电流值反馈给控制器83处理。
148.具体地,第二检测单元包括第十二电阻r12和第十电容c10,sob端与第十二电阻r12的一端连接,第十二电阻r12的另一端分别用于与控制器83的isenb端和第十电容c10的一端连接,第十电容c10的另一端接地;
149.所述第三检测单元,用于将采集的c相电流值反馈给控制器83处理。
150.具体地,第三检测单元包括第十三电阻r13和第十一电容c11,soc端与第十三电阻r13的一端连接,第十三电阻r13的另一端分别用于与控制器83的isenc端和第十一电容c11的一端连接,第十一电容c11的另一端接地。
151.具体地,所述参数设置模块86包括多个参数设置单元,每个参数设置单元分别通过至少一第七电阻r7上拉或者下拉设置驱动芯片对应的参数。
152.进一步地,所述驱动芯片82还包括与参数设置模块86连接的多个参数设置接口,多个参数设置接口为sdo端、sdi端、sclk端、scs端和fault端。
153.具体地,多个所述参数设置单元为第一参数设置单元、第二参数设置单元、第三参数设置单元、第四参数设置单元和第五参数设置单元。
154.所述第一参数设置单元包括两个第七电阻r7,sdo端通过其中一个第七电阻r7与控制器83的mode端连接,其中一个第七电阻r7通过另外一个第七电阻r7接地,两个第七电阻r7的阻值为0欧姆,设置pwm输入模式,通过其中一个第七电阻r7接地,设置6路pwm输入;
155.所述第二参数设置单元包括两个串联设置的第七电阻r7,sdi端通过串联设置的第七电阻r7接地;其中一个第七电阻r7的阻值为0欧姆,另外一个第七电阻r7阻值为75k欧姆,设置半桥电路mos管栅极驱动电流,通过第七电阻r7接地,设置栅极驱动电流为60/120ma;
156.所述第三参数设置单元包括两个串联设置的第七电阻r7,sdi端通过串联设置的第七电阻r7接地,第五上拉电阻r19的阻值为0欧姆,第六上拉电阻r20阻值为75k欧姆,设置vds过流报警电压,通过第七电阻r7接地,设置vds过流报警电压为0.26v;
157.所述第四参数设置单元包括第七电阻r7,scs端通过第七电阻r7接地,第七电阻r7的阻值为47k欧姆,设置电流采样放大电路增益,通过第七电阻r7接地,设置放大电路增益为10v/v。
158.所述参数设置模块86还包括报警单元,报警单元包括第八电阻r8、第九电阻r9、发光二极管和第十电阻r10,fault端分别与第八电阻r8一端、第九电阻r9一端和第十电阻r10一端连接,第八电阻r8另一端用于与3.3v供电电源连接,第九电阻r9另一端通过发光二极管用于与3.3v供电端连接,第十电阻r10另一端用于与控制器83的nfault端连接。
159.当fault端为高电平时,发光二极管d2不亮,为正常状态;当fault端为低电平时,发光二极管d2导通并发亮,为故障状态,提示尽快处理异常。
160.进一步地,所述驱动芯片3还包括多个电源接口,多个电源接口为vdrain端、vm端、vcp端、cph端、cpl端和dvdd端。
161.进一步地,所述旋转电机驱动电路8还包括供电电路模块87,供电电路模块87包括驱动电源单元871;
162.所述驱动电源单元871包括并联设置的第十二电容c12、第十三电容c13和第二磁珠fb2,所述vdrain端分别与并联设置的第十二电容c12、第十三电容c13和第二磁珠fb2的一端连接,第十二电容c12和第十三电容c13另一端接地;
163.所述第二磁珠fb2的另一端分别与多个并联设置的第十四电容c14一端和24v供电电源的正极端连接;
164.多个第十四电容c14的另一端分别接地。
165.具体地,所述供电电路模块87还包括芯片逻辑供电电源单元872;
166.所述芯片逻辑供电电源单元872包括第十五电容c15、第十六电容c16、第十七电容c17、第十八电容c18和第三磁珠fb3,所述vm端分别与第十五电容c15、第十六电容c16、第十七电容c17、第十八电容c18和第三磁珠fb3的一端连接,所述第十五电容c15的另一端与所述vcp端连接,第十六电容c16、第十七电容c17、第十八电容c18的另一端分别接地,所述第三磁珠fb3的另一端分别与24v供电电源的正极端和第十九电容c19的一端连接,所述第十九电容c19的另一端接地;
167.所述cph端和所述cpl端之间通过第二十电容c20连接;
168.所述dvdd端通过第二十一电容c21接地。
169.本发明提供了一种旋转电机驱动电路8,包括驱动旋转电机6的半桥模块81、控制半桥模块81的驱动芯片82、对驱动芯片82进行参数配置的参数设置模块86、采集旋转电机电流的电流采集模块84、将电流采集模块84采集的旋转电机电流信号反馈至控制器83的检测模块85,控制器83根据检测模块85馈送的旋转电机电流信号,调节输入至驱动芯片82中的pwm驱动信号的占空比,从而使半桥模块81输出驱动旋转电机6的稳定电流,基于多功能驱动芯片82及其辅助外围电路模块的旋转电机驱动电路8,减小了电路板的体积,节约了空间,并降低故障率,节约维修成本。
170.如图7~图9所示,不同的预设位置包括至少两个预设位置,其中一个预设位置用于驱动内刀管72旋转,另一个预设位置用于驱动内刀管72旋转和轴向移动。
171.具体地,本实施例中,不同的预设位置包括:
172.第一预设位置,用于驱动外刀管71旋转,外刀管71单独旋转以调节外刀管71端部
设置的切割窗口711的角度,便于切割窗口711朝向不同位置的待切割活体组织;
173.第二预设位置,用于驱动内刀管72旋转,可将药物经内刀管72注射并随着内刀管72旋转并均匀地扩散至活体组织的整个切口处,及时缓解患者的疼痛,还可通过内刀管72吸除患者体内的血肿,避免了血肿堵塞内刀管72的现象;
174.第三预设位置,用于驱动内刀管72旋转和轴向移动,以使内刀管72切割经切割窗口711吸附至外刀管71内的活体组织。
175.具体地,旋转电机驱动电路8控制旋转电机6驱动第一预设位置的齿轮组件1旋转以使活检针7的外刀管71旋转;驱动第二预设位置的齿轮组件1旋转以使活检针7的内刀管72旋转;驱动第三预设位置的齿轮组件1旋转以使活检针7的内刀管72相对外刀管71旋转和移动,即活检针7上设置有两个不同节圆直径的被动齿轮(73、74)并与齿轮组件1上两个不同节圆直径的主动齿轮(11、12)啮合从而组成差速结构,以使内刀管72即旋转又沿外刀管71轴向移动;本实施例中,两个被动齿轮(73、74)与两个主动齿轮(11、12)啮合为第三预设位置。
176.具体地,齿轮组件1轴向设置有两主动齿轮(本实施例中,为了便于理解两主动齿轮11、12从上至下设置),其中外径大的为第一主动齿轮11,外径小的为第二主动齿轮12,齿轮组件1轴向还设置有位于第二主动齿轮12下方且与第二主动齿轮12间隔设置的第三主动齿轮13;
177.在另外的实施例中,第一主动齿轮11和第二主动齿轮12的位置可以互换,第三主动齿轮13也可以设置第一主动齿轮11上方。
178.具体地,活检针7轴向设置有两被动齿轮(73、74),(本实施例中,为了便于理解,两被动齿轮73、74从上至下设置),其中外径小的为第一被动齿轮73,外径大的为第二被动齿轮74,本实施例中,活检针7轴向还设置有位于第一被动齿轮73上方用于控制外刀管71旋转的外刀管旋转齿轮75和位于第二被动齿轮74下方且与第二被动齿轮74间隔设置的内刀管旋转齿轮76;本实施例中,外刀管旋转齿轮75固定套设于外刀管外周,第一被动齿轮73、第二被动齿轮74和内刀管旋转齿轮76均固定套设于内刀管72外周;
179.在另外的实施例中,第一被动齿轮73和第二被动齿轮74的位置可以互换,内刀管旋转齿轮76和外刀管旋转齿轮75的位置也可以互换。
180.如图7所示,当齿轮组件1移至第一个预设位置,第一主动齿轮11与外刀管旋转齿轮75啮合,以驱动外刀管71旋转。
181.如图8所示,当齿轮组件1移至第二个预设位置,第三主动齿轮13与内刀管旋转齿轮76啮合,以驱动内刀管72旋转。
182.如图9所示,当齿轮组件1移至第三个预设位置,第一主动齿轮11与第一被动齿轮73啮合,第二主动齿轮12与第二被动齿轮74啮合,以驱动内刀管72旋转和轴向移动,从而切割外刀管71内的活体组织。
183.本发明提供的一种具有动力输出位置调节机构的组织旋切活检驱动手柄,只需一个旋转电机6驱动齿轮组件1在不同位置输出对应动力参数的运动,满足了组织旋切活检术时活检针7所要求的驱动需求,实现了各种临床使用功能需求,节约了成本,减小了组织旋切活检驱动手柄的体积重量,提高了临床应用中的操控性。
184.组织旋切活检驱动手柄还包括:
185.判断单元,用于判断平移电机2的当前位置是在复位区域还是在非复位区域;
186.执行单元,用于当前位置在复位区域时控制平移电机朝向非复位区域移动或者用于当前位置在非复位区域时控制平移电机朝向复位区域移动,当平移电机的当前位置从复位区域移至非复位区域的临界点或者从非复位区域移至复位区域的临界点时,控制平移电机停止转动;
187.设置单元,用于将当前位置位于复位区域与非复位区域之间的临界点设置为原点位置,可使平移电机2在原点位置驱动齿轮组件1轴向移至不同的预设位置,解决了现有技术中电机每次起始位置不同造成电机在多次启动过程中增大移动行程从而增大组织旋切活检驱动手柄空间的问题,减小了平移电机2的行程,节约了组织旋切活检驱动手柄的内部空间并减轻了重量,提高了组织旋切活检驱动手柄实际应用中的操控性,本实施例中判断单元、执行单元和设置单元均位于控制芯片4内。
188.本发明还提供了一种组织旋切活检驱动手柄的控制方法,包括如下步骤:
189.s1.控制芯片4的判断单元判断平移电机2的当前位置是在复位区域还是在非复位区域;
190.s2.若平移电机2的当前位置在复位区域时控制平移电机2朝向非复位区域移动(包括正转或反转,本实施例中优选为反转)或者用于当前位置在非复位区域时控制平移电机2朝向复位区域移动(包括反转或正转,本实施例中优选为正转),当平移电机2的当前位置从复位区域移至非复位区域的临界点或者从非复位区域移至复位区域的临界点时,控制芯片4的执行单元控制平移电机2停止转动;
191.s3.控制芯片4的设置单元将当前位置位于复位区域与非复位区域之间的临界点设置为原点位置;
192.s4.控制芯片4的执行单元控制平移电机在原点位置驱动齿轮组件1轴向移至不同的预设位置;
193.s5.旋转电机6驱动齿轮组件1在不同的预设位置输出旋转动力进而驱动与齿轮组件1啮合的活检针7在不同的预设位置输出动力(该输出动力包括分别控制外刀管71和内刀管72旋转以及内刀管72即旋转又轴向移动)。
194.进一步地,判断平移电机2的当前位置包括:当检测电路3的复位开关处于断开状态时,当前位置位于非复位区域;当齿轮组件1移动使检测电路3的复位开关31闭合时,当前位置在复位区域,且检测电路对控制芯片4输出当前位置在复位区域的限位位置信号。
195.进一步地,将平移电机2的当前位置调节至原点位置包括:控制芯片4接收到检测电路3输出的当前位置在复位区域的限位位置信号并控制平移电机2旋转以从当前位置移至原点位置。
196.步骤s1中具体包括:
197.a.判断平移电机2的当前位置是否在非复位区域,若是,控制芯片4的执行单元控制平移电机2反转;若否,则执行d步骤;
198.b.判断平移电机2的当前位置是否在复位区域,若是,则停止平移电机2反转,并执行d步骤;若否,则执行下一步;
199.c.判断平移电机2反转是否停止,若是,则检测电路3未检测到限位位置信号,异常结束;若否,则执行b步骤;
200.d.控制平移电机2正转;
201.e.判断平移电机2的当前位置是否在非复位区域,若是,则执行g步骤;若否,则执行下一步;
202.f.判断平移电机2正转是否停止,若是,则检测电路3未检测到限位位置信号,异常结束;若否,则执步骤;
203.g.当平移电机2的当前位置在非复位区域与复位区域的临界点时,平移电机2停止反转;
204.h.将当前位置设置为原点位置。
205.本发明提供了一种组织旋切活检驱动手柄的控制方法,首先,判断平移电机2当前位置是在复位区域还是在非复位区域;接着,控制当前位置从复位区域移至非复位区域或者非复位区域移至复位区域,再接着,将当前位置位于复位区域与非复位区域之间的临界点设置为原点位置;然后,在原点位置驱动齿轮组件1轴向移至不同的预设位置;最后,在不同的预设位置输出旋转动力进而驱动与齿轮组件1啮合的活检针7在不同的预设位置输出动力。只需一个平移电机2在原点位置驱动齿轮组件1精确移至不同的预设位置,同时旋转电机6驱动齿轮组件2旋转可在不同位置输出对应动力参数的运动,满足了活检针7所要求的驱动需求,实现了活检针7多种使用功能需求,节约了成本,减小了组织旋切活检驱动手柄的体积重量,提高了实际应用中的操控性。
206.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。