1.本实用新型属于无人机技术领域,具体涉及一种多视场目标侦察系统及搭载其的弹射型无人机。
背景技术:
2.目前,进行目标侦察时,采用可见光相机与红外热像仪两个独立的相机相结合的双视场成像系统。可见光相机负责可见光成像和可见光图像处理,进而进行白天及光线充足条件下目标侦察,红外热像仪负责红外成像和红外图像处理,以进行夜晚及光线昏暗条件下目标侦察。目标侦察系统可见光相机为独立的相机,包括成像、图像处理两部分,红外热像仪为独立的相机,包括成像、图像处理两部分,两个独立的相机与fpga连接,再通过dsp/图像处理模块输出视频图像。
3.传统的双视场红外光学系统分为两类:一类为切换式,通过切换系统中的透镜组来改变光学系统的焦距。这类光学系统的特点是在窄视场光路中没有运动光学元件,其光学系统光轴稳定性好,系统切换时间短、透过率高;存在的问题是有一组透镜处于光路以外的闲置状态,透镜使用效率不高。而且,透镜切换时需要较大空间,因而光学系统横向尺寸较大。第二类为轴向移动式,通过透镜组轴向间隔的变化而改变光学系统的焦距,虽然通过系统优化设计对轴向尺寸进行控制,可以在较短的轴向尺寸下获得满意的成像质量,其缺点为轴向尺寸较大。
4.整体而言,在有限的载荷尺寸下,两个独立的小视场(长焦)相机模块导致载荷体积较大,而弹射型无人机对侦察载荷的尺寸有着严格的要求,只能被动选用大视场(短焦或变焦)相机,无法满足弹射型无人机侦察要求,同时小视场可见光模组受其他模组影响,目标侦察效率低,跟踪时图像存在延时。而大视场(短焦)相机对于远距离目标不能做到及时发现、跟踪。另一方面,传统光学变焦系统抗发射冲击性能较弱,在弹射无人机起飞时,光学对焦部件易损坏,导致无法对焦。
技术实现要素:
5.为此,本实用新型提供一种多视场目标侦察系统及搭载其的弹射型无人机,实现在一个系统内部的多视场成像和图像处理,解决作用距离近、视场小、图像处理延时侦察效率低的问题。
6.为了实现上述目的,本实用新型提供如下技术方案:一种多视场目标侦察系统,包括大视场可见光模组、小视场可见光模组、大视场红外模组、小视场红外模组、fpga核心处理板和高清图像处理板;
7.所述大视场可见光模组配置有大视场可见光传感器板与大视场可见光接口板,大视场可见光模组通过所述大视场可见光传感器板、大视场可见光接口板与所述fpga核心处理板电连接;
8.所述小视场可见光模组配置有小视场可见光传感器板与小视场可见光接口板,小
视场可见光模组通过所述小视场可见光传感器板、小视场可见光接口板与所述高清图像处理板电连接;
9.所述大视场红外模组配置有大视场红外传感器板与大视场红外接口板,大视场红外模组通过所述大视场红外传感器板、大视场红外接口板与所述fpga核心处理板电连接;
10.所述小视场红外模组配置有小视场红外传感器板与小视场红外接口板,小视场红外模组通过所述小视场红外传感器板、小视场红外接口板与所述fpga核心处理板电连接;
11.所述高清图像处理板与所述fpga核心处理板之间电连接,大视场可见光模组和大视场红外模组用于近距离景物区域的目标搜索,小视场可见光模组和小视场红外模组用于远距离目标侦察及对搜索出的目标进行仔细观察或放大;高清图像处理板用于对大视场可见光模组及小视场可见光模组进行图像处理。
12.作为多视场目标侦察系统的优选方案,所述大视场可见光传感器板与大视场可见光接口板之间采用接插件连接;
13.所述小视场可见光传感器板与小视场可见光接口板之间采用接插件连接;
14.所述大视场红外传感器板与大视场红外接口板之间采用接插件连接;
15.所述小视场红外传感器板与小视场红外接口板之间采用接插件连接。
16.作为多视场目标侦察系统的优选方案,所述大视场可见光模组的大视场可见光接口板、大视场红外模组的大视场红外接口板、小视场红外模组的小视场红外接口板均通过柔性同轴线与fpga核心处理板的i2c通信接口连接,小视场可见光模组的小视场可见光接口板通过柔性同轴线与高清图像处理板连接;
17.所述大视场红外模组和小视场红外模组通过一分二柔性同轴线与fpga核心处理板连接;
18.所述fpga核心处理板通过ttl串口与高清图像处理板连接。
19.作为多视场目标侦察系统的优选方案,所述大视场可见光模组还包括大视场可见光镜头和集成在大视场可见光传感器板上的大视场可见光传感器,所述大视场可见光镜头与大视场可见光传感器连接;所述大视场可见光接口板为大视场可见光传感器提供电源;
20.所述小视场可见光模组还包括小视场可见光镜头和集成在小视场可见光传感器板上的小视场可见光传感器,所述小视场可见光镜头与小视场可见光传感器连接;所述小视场可见光接口板为小视场可见光传感器提供电源;
21.所述大视场红外模组还包括大视场红外镜头和集成在大视场红外传感器板上的大视场红外传感器,所述大视场红外镜头与大视场红外传感器连接;所述大视场红外接口板为大视场红外传感器提供电源;
22.所述小视场红外模组还包括小视场红外镜头和集成在小视场红外传感器板上的小视场红外传感器,所述小视场红外镜头与小视场红外传感器连接;所述小视场红外接口板为小视场红外传感器提供电源;
23.所述大视场可见光模组、小视场可见光模组和大视场红外模组通过三托式一体化结构件连接,所述三托式一体化结构件同时连接大视场可见光镜头、大视场可见光传感器板、大视场可见光接口板、小视场可见光镜头、小视场可见光传感器板、小视场可见光接口板、大视场红外镜头、大视场红外传感器板与大视场红外接口板;
24.所述小视场红外模组通过独立一体化结构件连接小视场红外模组的小视场红外
镜头、小视场红外传感器板与小视场红外接口板。
25.作为多视场目标侦察系统的优选方案,所述大视场可见光传感器板与大视场可见光接口板为两层叠加结构;
26.所述小视场可见光传感器板与小视场可见光接口板为两层叠加结构;
27.所述大视场红外传感器板与大视场红外接口板为两层叠加结构;
28.所述小视场红外传感器板与小视场红外接口板为单层并列结构。
29.作为多视场目标侦察系统的优选方案,所述fpga核心处理板以120hz高帧频对大视场可见光模组进行图像处理、目标跟踪及字符叠加;fpga核心处理板将120hz图像转换为60hz图像传输给高清图像处理板进行调光处理。
30.作为多视场目标侦察系统的优选方案,所述fpga核心处理板通过i2c通信接口实时对大视场可见光模组进行积分时间、模拟增益和数字增益参数实时调节;
31.fpga核心处理板通过i2c通信接口对大视场红外模组、小视场红外模组进行积分时间、积分电容、偏置电压参数进行初始化配置;
32.高清图像处理板通过i2c通信接口对小视场可见光模组进行积分时间、模拟增益和数字增益参数实时调节。
33.作为多视场目标侦察系统的优选方案,所述大视场可见光模组的原始图像进过fpga的解析后,传输至高清图像处理板中进行坏点替换、非均匀校正、调光、色彩还原和自动白平衡;
34.所述小视场可见光模组在高清图像处理板中进行坏点替换、非均匀校正、调光、色彩还原和自动白平衡,将处理后的图像传输至fpga核心处理板以供跟踪处理;
35.所述大视场红外模组和小视场红外模组同时在fpga核心处理板进行坏点替换、非均匀校正和调光环节。
36.作为多视场目标侦察系统的优选方案,所述fpga核心处理板包含视频跟踪功能,所述视频跟踪功能用于对大视场红外模组、小视场红外模组、大视场可见光模组及小视场可见光模组进行目标跟踪及字符叠加。
37.本实用新型还提供一种弹射型无人机,搭载有上述的多视场目标侦察系统。
38.本实用新型具有如下优点:目标侦察系统包括大视场可见光模组、小视场可见光模组、大视场红外模组、小视场红外模组,每个模组后设独立的传感器板与接口板,传感器板与接口板通过接插件连接,还包括设立于系统内部的fpga核心处理板和高清图像处理板;大视场可见光模组、大视场红外模组、小视场红外模组与fpga核心处理板连接,小视场可见光模组与高清图像处理板连接,能够提升大视场可见光模组的帧率,还能使小视场可见光模组不受其他模组影响,有效降低目标侦察、跟踪时图像延时,提升侦察实时性能;大、小视场优势互补,提升侦察作用距离,扩大搜索范围;本实用新型还缩小了相机焦距,降低了载荷尺寸,有效节约了载荷内部空间,做到了载荷球体尺寸的小型化,更好的适用于弹射型无人机;同时,避免了变焦相机在弹射无人机起飞时容易损坏的问题。
附图说明
39.为了更清楚地说明本实用新型的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附
图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
40.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。
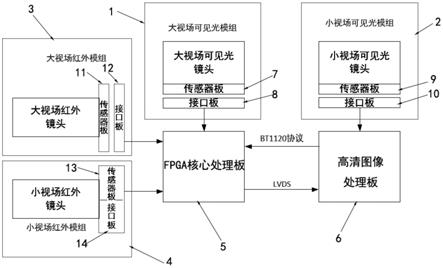
41.图1为本实用新型实施例中提供的一种多视场目标侦察系统架构示意图;
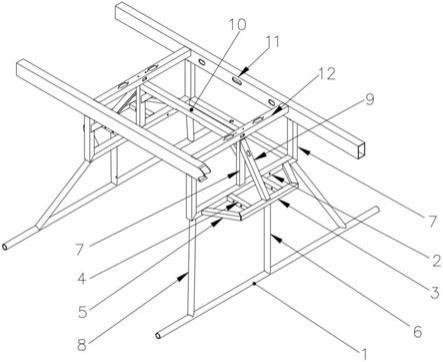
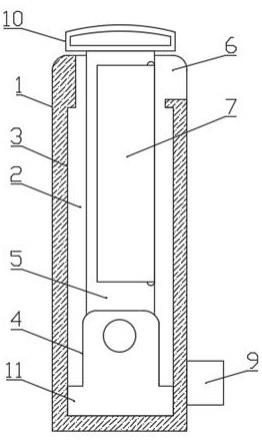
42.图2为本实用新型实施例中提供的多视场目标侦察系统载荷球体结构示意图;
43.图3为本实用新型实施例中提供的另一视角下的多视场目标侦察系统载荷球体结构示意图;
44.图4为本实用新型实施例中提供的大视场可见光模组、小视场可见光模组和大视场红外模组通过三托式一体化结构件连接示意图;
45.图5为本实用新型实施例中提供的小视场红外模组通过独立一体化结构件连接小视场红外模组示意图。
46.图中:1、大视场可见光模组;2、小视场可见光模组;3、大视场红外模组;4、小视场红外模组;5、fpga核心处理板;6、高清图像处理板;7、大视场可见光传感器板;8、大视场可见光接口板;9、小视场可见光传感器板;10、小视场可见光接口板;11、大视场红外传感器板;12、大视场红外接口板;13、小视场红外传感器板;14、小视场红外接口板;15、三托式一体化结构件;16、独立一体化结构件。
具体实施方式
47.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
48.需要强调的是,本实用新型中涉及的“大”“小”,“大视场”“小视场”,“远”“近”“高清”是相机技术领域的人员所知悉的惯用的表达方式,并不会造成本技术技术方案的模糊性和保护范围的不清楚性,本领域技术人员知悉“大”“小”“远”“近”是一个相对的概念。
49.本技术中积分时间、模拟增益、数字增益参数调节、坏点替换、非均匀校正、调光、色彩还原和自动白平衡等本身所涉及的处理方法和算法是本领域技术人员知悉的现有技术。
50.参见图1、图2和图3,提供一种多视场目标侦察系统,包括大视场可见光模组1、小视场可见光模组2、大视场红外模组3、小视场红外模组4、fpga核心处理板5和高清图像处理板6;
51.所述大视场可见光模组1配置有大视场可见光传感器板7与大视场可见光接口板8,大视场可见光模组1通过所述大视场可见光传感器板7、大视场可见光接口板8与所述fpga核心处理板5电连接;
52.所述小视场可见光模组2配置有小视场可见光传感器板9与小视场可见光接口板10,小视场可见光模组2通过所述小视场可见光传感器板9、小视场可见光接口板10与所述高清图像处理板6电连接;
53.所述大视场红外模组3配置有大视场红外传感器板11与大视场红外接口板12,大视场红外模组3通过所述大视场红外传感器板11、大视场红外接口板12与所述fpga核心处理板5电连接;
54.所述小视场红外模组4配置有小视场红外传感器板13与小视场红外接口板14,小视场红外模组4通过所述小视场红外传感器板13、小视场红外接口板14与所述fpga核心处理板5电连接;
55.所述高清图像处理板6与所述fpga核心处理板5之间电连接,大视场可见光模组1和大视场红外模组3用于近距离景物区域的目标搜索,小视场可见光模组2和小视场红外模组4用于远距离目标侦察及对搜索出的目标进行仔细观察或放大;高清图像处理板6用于对大视场可见光模组1及小视场可见光模组2进行图像处理。
56.本实施例中,所述大视场可见光传感器板7与大视场可见光接口板8之间采用接插件连接;
57.所述小视场可见光传感器板9与小视场可见光接口板10之间采用接插件连接;
58.所述大视场红外传感器板11与大视场红外接口板12之间采用接插件连接;
59.所述小视场红外传感器板13与小视场红外接口板14之间采用接插件连接。
60.所述大视场可见光传感器板7与大视场可见光接口板8为两层叠加结构;
61.所述小视场可见光传感器板9与小视场可见光接口板10为两层叠加结构;
62.所述大视场红外传感器板11与大视场红外接口板12为两层叠加结构;
63.所述小视场红外传感器板13与小视场红外接口板14为单层并列结构。
64.具体的,大视场可见光传感器板7与大视场可见光接口板8、小视场可见光传感器板9与小视场可见光接口板10、大视场红外传感器板11与大视场红外接口板12均采用两层结构,且均通过接插件连接,这样可以节约载荷内部空间,缩小载荷尺寸。小视场红外传感器板13与小视场红外接口板14设计为单层大面积结构,由于小视场红外模组4较大,占用载荷前部空间较多,而小视场红外模组4对应的载荷后部位置需同时放置fpga核心处理板5与高清图像处理板6,因此将小视场红外模组4的传感器板与接口板设计为一体化集成的单层板块,有效节约了载荷内部空间,做到了载荷球体尺寸的小型化,更好的适用于弹射型无人机。
65.本实施例中,所述大视场可见光模组1的大视场可见光接口板8、大视场红外模组3的大视场红外接口板12、小视场红外模组4的小视场红外接口板14均通过柔性同轴线与fpga核心处理板5的i2c通信接口连接,小视场可见光模组2的小视场可见光接口板10通过柔性同轴线与高清图像处理板6连接;所述fpga核心处理板5通过ttl串口与高清图像处理板6连接,按照sublvds协议传输原始图像信号。
66.本实施例中,大视场红外模组3和小视场红外模4组通过一分二柔性同轴线与fpga核心处理板连接。一分二同轴线的两个子线分别连接大视场红外模组3和小视场红外模组4,一分二同轴线的另一端总线连接fpga核心处理板5。
67.具体的,所述fpga核心处理板5通过i2c通信接口实时对大视场可见光模组1进行
积分时间、模拟增益和数字增益参数实时调节;从而对大视场可见光模组1进行驱动,实现实时参数调整。fpga核心处理板5通过i2c通信接口对大视场红外模组3、小视场红外模组4进行积分时间、积分电容、偏置电压参数进行初始化配置;从而生成大视场红外模组3、小视场红外模组4所需驱动信号,实现对大视场红外模组3、小视场红外模组4的驱动。高清图像处理板6通过i2c通信接口对小视场可见光模组2进行积分时间、模拟增益和数字增益参数实时调节。从而对小视场可见光模组2进行驱动,实现实时参数调整。
68.具体的,fpga核心处理板5共连接四路视频通道,大视场红外模组3、小视场红外模组4,大视场可见光模组1和高清图像处理板6。fpga核心处理板5具备控制、切换四路视频通道的功能,并能通过串口协议通知高清图像处理板6所输出的是哪一路视频流;高清图像处理板6根据不同视频流,选择不同的处理方式。
69.具体的,fpga核心处理板5通过ttl串口与高清图像处理板6连接;线缆为柔性极细同轴线,柔韧性较大,位置形状可随外形而变化。
70.本实施例中,所述大视场可见光模组1还包括大视场可见光镜头和集成在大视场可见光传感器板7上的大视场可见光传感器,所述大视场可见光镜头与大视场可见光传感器连接;所述大视场可见光接口板8为大视场可见光传感器提供电源;
71.所述小视场可见光模组2还包括小视场可见光镜头和集成在小视场可见光传感器板9上的小视场可见光传感器,所述小视场可见光镜头与小视场可见光传感器连接;所述小视场可见光接口板10为小视场可见光传感器提供电源;
72.所述大视场红外模组3还包括大视场红外镜头和集成在大视场红外传感器板11上的大视场红外传感器,所述大视场红外镜头与大视场红外传感器连接;所述大视场红外接口板12为大视场红外传感器提供电源;
73.所述小视场红外模组4还包括小视场红外镜头和集成在小视场红外传感器板13上的小视场红外传感器,所述小视场红外镜头与小视场红外传感器连接;所述小视场红外接口板14为小视场红外传感器提供电源。
74.辅助图4,本实施例中,所述大视场可见光模组1、小视场可见光模组2和大视场红外模组3通过三托式一体化结构件15连接,所述三托式一体化结构件15同时连接大视场可见光镜头、大视场可见光传感器板7、大视场可见光接口板8、小视场可见光镜头、小视场可见光传感器板9、小视场可见光接口板10、大视场红外镜头、大视场红外传感器板11与大视场红外接口板12.
75.辅助图5,本实施例中,所述小视场红外模组4通过独立一体化结构件16连接小视场红外模组4的小视场红外镜头、小视场红外传感器板13与小视场红外接口板14。
76.本实施例中,所述fpga核心处理板5以120hz高帧频对大视场可见光模组1进行图像处理、目标跟踪及字符叠加;fpga核心处理板5将120hz图像转换为60hz图像传输给高清图像处理板6进行调光处理。
77.具体的,由于在高分辨率条件下,高清图像处理板6可接收帧率为30hz~60hz,本实用新型将大视场可见光模组1与fpga核心处理板5连接,fpga核心处理板5以120hz高帧频对大视场可见光模组1进行图像处理、目标跟踪及字符叠加,提升了大视场可见光模组1的帧率,降低了大视场可见光模组1跟踪目标时的图像延时,提升了目标跟踪实时性能;同时将120hz图像转换为60hz图像传输给高清图像处理板6进行调光处理,保证了良好的图像处
理效果。
78.本实施例中,所述大视场可见光模组1和小视场可见光模组2在高清图像处理板6中进行坏点替换、非均匀校正、调光、色彩还原和自动白平衡;所述大视场红外模组3和小视场红外模组4在fpga核心处理板5进行坏点替换、非均匀校正和调光环节(红外无需色彩还原和自动白平衡)。
79.本实施例中,所述fpga核心处理板5包含视频跟踪功能,所述视频跟踪功能用于对大视场红外模组3、小视场红外模组4、大视场可见光模组1及小视场可见光模组2进行目标跟踪及字符叠加。
80.具体的,fpga核心处理板5上包含了视频跟踪功能,视频跟踪功能通过软件算法及硬件协作实现了大视场红外模组3、小视场红外模组4、大视场可见光模组1的目标跟踪及字符叠加功能。并且高清图像处理板6通过bt1120协议将视频流输出至fpga核心处理板5,fpga核心处理板5对视频流进行目标跟踪、字符叠加处理,从而实现小视场可见光模组2的目标跟踪、字符叠加功能。
81.本实用新型实施例还提供一种弹射型无人机,搭载有上述的多视场目标侦察系统。具体的,弹射无人机,包括机身,以及搭载于无人机内部的多视场目标侦察系统。其中所述多视场目标侦察系统包括大视场可见光模组1、小视场可见光模组2、大视场红外模组3、小视场红外模组4,每个模组后设独立的传感器板与接口板,传感器板与接口板通过接插件连接,还包括设立于系统内部的fpga核心处理板5和高清图像处理板6;大视场可见光模组1、大视场红外模组3、小视场红外模组4通过柔性极细同轴线与fpga核心处理板5连接,小视场可见光模组2与高清图像处理板6连接。
82.传统技术中,由两个独立的相机:可见光相机和红外热像仪组成。可见光相机负责可见光成像和可见光图像处理,红外热像仪负责红外成像和红外图像处理;本实用新型实施例将两个独立的相机设计为可见光模组和红外模组,可见光模组用于可见光成像,红外模组用于红外成像,可见光模组图像处理部分在高清图像处理板6中实现,红外模组图像处理部分在fpga核心处理板5中实现。
83.传统目标侦察系统可见光相机为独立的相机,包括成像、图像处理两部分,红外热像仪为独立的相机,包括成像、图像处理两部分,两个独立的相机与fpga连接,再通过dsp/图像处理模块输出视频图像。本实用新型实施例将传统可见光相机设计为可见光模组,可见光模组只用于可见光成像,将大视场可见光模组1、小视场可见光模组2的图像处理部分在高清图像处理板6中实现,使其满足弹射型无人机载荷尺寸的条件下,尽可能地采用视场更小、焦距更长的模组。
84.本实用新型实施例将传统红外热像仪设计为红外模组,大视场红外模组3和小视场红外模组4只用于红外成像,将红外模组的图像处理部分在fpga核心处理板5中实现,使其满足弹射型无人机载荷尺寸的条件下,尽可能地采用视场更小、焦距更长的模组。由于fpga核心处理板5具有引脚多、可扩展性强的特点,可连接多路传感器。本实用新型实施例将大视场红外模组3、小视场红外模组4、大视场可见光模组1与fpga核心处理板5连接,从而实现在一个系统内部的多视场成像和图像处理;本实用新型实施例将小视场可见光模组2与高清图像处理板6连接,高清图像处理板6直接对小视场可见光模组2进行图像处理,减小了图像处理延时,并使其不受其它模组影响;
85.传统目标侦察系统由具备成像和图像处理功能的独立可见光相机和具备成像和图像处理功能的独立热像仪组成。由于成像和图像处理功能均在相机内部实现,导致相机模块较大,从而导致载荷较大。而弹射型无人机对侦察载荷的尺寸有着严格的要求,只能被动选用大视场(短焦或变焦)相机。另一方面,传统光学变焦相机抗发射冲击性能较弱,在弹射无人机起飞时,光学对焦部件易损坏,导致无法对焦。本实用新型将传统小视场(长焦相机或变焦相机)设计包含大、小视场两个定焦相机的大视场可见光模组1及小视场可见光模组2,缩小了相机焦距,降低了载荷尺寸,从而满足弹射型无人机载荷要求;同时,避免了变焦相机在弹射无人机起飞时容易损坏的问题。
86.本实用新型实施例采用大视场可见光模组1、小视场可见光模组2、大视场红外模组3和小视场红外模组4。其中,大视场可见光模组1、大视场红外模组3用于近距离景物区域的大范围观察、搜索疑似目标,小视场可见光模组2、小视场红外模组4用于远距离目标侦察,并对搜索出的目标进行仔细观察或放大,从而看清目标细节。大、小视场相互配合,在载荷有限尺寸下,减少了失效距离,有效提升了侦察系统的作用距离。
87.本实用新型实施例中,红外模组使用非制冷双视场红外热像仪,相对传统方式改变红外光学系统的方法具有以下优点:1,体积小、质量轻、成本低,体积、重量、成本均为传统光学系统方式的1/2左右;2,采集工艺简单,定焦镜头进行无热化处理,成像稳定;3,功耗低,定焦镜头无需电机驱动;4,视场切换快,传统的切换方式一般采用电机驱动机械进行变换,大约需要10s,而本实用新型中只需要1s即可实现切换。
88.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。