1.本实用新型涉及机械加工领域,具体涉及一种摩擦轮自动化辅助装置。
背景技术:
2.摩擦轮作为纺织机械中的一个零件,随着纺织品市场的需求不断扩大对其的用量也不断增加。由于目前摩擦轮的生产还多依赖于人工操作,生产效率较低,且工作环境较为恶劣,使得生产企业一度陷入招工困难的境地,迫使摩擦轮转向自动化生产。
技术实现要素:
3.为了解决上述技术问题,本实用新型提供一种摩擦轮自动化辅助装置,本实用新型能够通过各个模块的运行实现摩擦轮加工的自动化。该装置采用分层式模块安装,结构简单、设计合理、便于维护、可靠性高、性价比高、生产效率高,储件支撑架采用内部存件的结构更利于加工好的零件存放。
4.为了实现上述技术目的,本实用新型的技术方案如下:
5.一种摩擦轮自动化辅助装置,包括:储件支撑架、吹气杆、固定支撑架、螺母推杆、加工设备主体主体、称料模块、送料模块、螺母传送装置、取件模块;所述储件支撑架与所述固定支撑架分别设置在所述加工设备主体主体两侧;所述称料模块、所述送料模块、所述吹气杆、所述螺母推杆固定设置在所述固定支撑架内;所述螺母传送装置设置在所述固定支撑架的一侧;所述取件模块设置在所述储件支撑架上。
6.优选地,所述固定支撑架内设有下料装置,且所述下料装置、所述螺母传送装置设置在所述加工设备主体主体的一侧,所述储件支撑架、所述取件模块设置在所述加工设备主体主体的另一侧。
7.优选地,所述称料模块包括:下料漏斗、转盘,所述下料漏斗设置在所述固定支撑架内顶部;所述转盘设置在所述下料漏斗的口端;所述转盘通过齿带与旋转气缸相连;所述转盘下方设有装料匣;所述装料匣底部设有滑块,所述滑块一侧连有第一气缸。
8.优选地,所述滑块内设有重力传感器。
9.优选地,所述送料模块包括:引流漏斗;所述引流漏斗设置在所述下料漏斗下端;所述引流漏斗的漏斗口通过软管与下料导口相连接;所述下料导口与所述第二气缸相连接。
10.优选地,所述螺母推杆设置在所述送料模块的下端,且所述螺母推杆的一侧连有第三气缸。
11.优选地,所述吹气杆设置在所述螺母推杆下方,且所述吹气杆的一侧连有第四气缸,所述吹气杆与所述第四气缸的进给方向与水平呈
°
夹角。
12.优选地,所述取件模块设置在所述储件支撑架的上端,所述取件模块包括:第五气缸、第六气缸、三爪气动卡盘;所述第五气缸、所述第六气缸分别固定于所述储件支撑架的上端;所述三爪气动卡盘分别与所述第五气缸、所述第六气缸相连接。
13.与现有技术相比较,本实用新型具有的有益效果如下:
14.本实用新型的一种摩擦轮自动化辅助装置,自动化程度高、结构紧凑、制作成本低、实现了摩擦轮的自动化生产,极大地提高了设备的生产效率。
附图说明
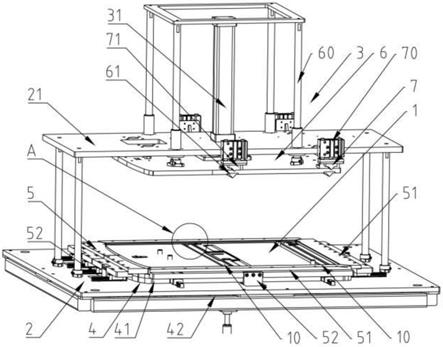
15.图1为本实用新型一种摩擦轮自动化辅助装置的结构示意图;
16.图2为本实用新型一种摩擦轮自动化辅助装置的取件模块的放大示意图;
17.图3为本实用新型一种摩擦轮自动化辅助装置的取件模块的侧视图;
18.图4为本实用新型一种摩擦轮自动化辅助装置的下料部分的放大示意图;
19.图5为本实用新型一种摩擦轮自动化辅助装置的下料部分的后视图;
20.图6为本实用新型一种摩擦轮自动化辅助装置的下料部分旋转气缸的放大示意图;
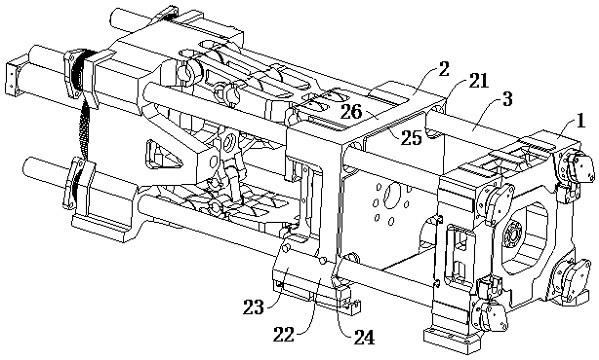
21.图7为本实用新型一种摩擦轮自动化辅助装置的上螺母装置的放大示意图;
22.图8为本实用新型一种摩擦轮自动化辅助装置的螺母传送装置的放大示意图;
23.附图标记:1、储件支撑架,2、第五气缸,3、取件模块,4、第六气缸,5、三爪气动卡盘,6、齿带,7、滑块,8、引流漏斗,9、下料导口,10、吹气杆,11、底座,12、下料漏斗,13、固定支撑架,14、装料匣,15、第一气缸,16、第二气缸,17、第三气缸,19、第七气缸,20、固定支撑座,21、第四气缸22、螺母接盘,24、磁铁、25、转盘,26、旋转气缸27、螺母推杆,28、加工设备主体。
具体实施方式
24.为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。在下面的描述中,提供诸如具体的配置和组件的特征细节仅仅是为了帮助全面理解本实用新型的实施例。因此,本领域技术人员应该清楚,可以对这里描述的实施例进行各种改变和修改而不脱离本实用新型的范围和精神。另外,为了清楚和简洁,省略了对已知功能和构造的描述。
25.应理解,说明书通篇中提到的“一个实施例”或“一实施例”意味着与实施例有关的特定特征、结构或特性包括在本实用新型的至少一个实施例中。因此,在整个说明书各处出现的“在一个实施例中”或“在一实施例中”未必一定指相同的实施例。此外,这些特定的特征、结构或特性可以任意适合的方式结合在一个或多个实施例中。
26.在本实用新型的各种实施例中,应理解,下述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本实用新型实施例的实施过程构成任何限定。
27.应理解,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
28.在本技术所提供的实施例中,应理解,“与a相应的b”表示b与a相关联,根据a可以确定b。但还应理解,根据a确定b并不意味着仅仅根据a确定b,还可以根据a和/或其它信息确定b。
29.结合附图1
‑
8,本实用新型提供一种摩擦轮自动化辅助装置,包括:储件支撑架1、吹气杆10、固定支撑架13、螺母推杆27、加工设备主体28、称料模块、送料模块、螺母传送装置、取件模块3;储件支撑架1与固定支撑架13分别设置在加工设备主体28两侧;称料模块、送料模块、吹气杆10、螺母推杆27固定设置在固定支撑架13内;螺母传送装置设置在固定支撑架13的一侧;取件模块设置在储件支撑架1上。
30.在一个实施例中,固定支撑架13内设有下料装置,且下料装置、螺母传送装置设置在加工设备主体28的一侧,储件支撑架1、取件模块设置在加工设备主体28的另一侧。
31.优选地,称料模块包括:下料漏斗12、转盘25,下料漏斗12设置在固定支撑架13内顶部;转盘25设置在下料漏斗12的口端;转盘25通过齿带6与旋转气缸26相连;转盘25下方设有装料匣14;装料匣14底部设有滑块7,滑块7一侧连有第一气缸15。
32.进一步说明,滑块7内设有重力传感器。
33.进一步说明,送料模块包括:引流漏斗8;引流漏斗8设置在下料漏斗12下端;引流漏斗8的漏斗口通过软管与下料导口9相连接;下料导口9与第二气缸16相连接。
34.优选地,螺母推杆27设置在送料模块的下端,且螺母推杆27的一侧连有第三气缸17。
35.优选地,吹气杆10设置在螺母推杆27下方,且吹气杆10的一侧连有第四气缸21,吹气杆10与第四气缸21的进给方向与水平呈45
°
夹角。
36.优选地,取件模块设置在储件支撑架1的上端,取件模块包括:第五气缸2、第六气缸4、三爪气动卡盘5;第五气缸2、第六气缸4分别固定于储件支撑架1的上端;三爪气动卡盘5分别与第五气缸2、第六气缸4相连接。
37.实施例1
38.本实用新型包括固定支撑架13、储件支撑架1和加工设备主体28,固定支撑架13上分别固定安装有称重模块、送料模块、螺母推杆27和吹气杆10;固定支撑架一侧放置有上螺母装置;储件支撑架1上固定安装有取件模块。
39.称料模块包括下料漏斗12;称料模块安装在固定支撑架13上层;下料漏斗12口处装有转盘25;转盘25通过齿带6与旋转气缸26相连;转盘25下安装有装料匣14;装料匣14底部装有重力传感器制成的滑块7;滑块7一侧与第一气缸15相连。
40.送料模块包括引流漏斗8;引流漏斗8安装在滑块7下方且通过软管与下料导口9相连;下料导口9一侧与第二气缸16相连。
41.上螺母装置通过导轨与固定支撑架13相连;上螺母装置包括固定支撑座20;固定支撑座20上安装有第七气缸19;第七气缸19与底座11相连;底座11上装有螺母接盘22;螺母接盘22底部装有磁铁24。
42.螺母推杆27安装在送料模块下方且一侧与第三气缸17相连;吹气杆10安装于螺母推杆27下方且一侧与第四气缸21相连。
43.加工设备主体28置于固定支撑架13与储件支撑架1中间,为摩擦轮注塑执行机构。
44.储件支撑架1上装有取件模块;取件模块通过第五气缸2实现水平方向运动,通过第六气缸4实现竖直方向运动;取件模块采用气动三爪卡盘5实现工件夹取。
45.在实际生产中,本实施例中所有操作工序的动作部件都需接入plc控制系统来实现全自动操作。物料在下料漏斗12中下落到装料匣14中,在称料同时,上螺母装置将螺母推
送到指定位置后,螺母接盘22旋转90
°
,螺母推杆27前推,在磁力的作用下,螺母将牢牢卡在推杆上,并将螺母推至加工设备主体28注塑模具的螺母孔中。装料匣7底部重力传感器测得物料达到指定数量后旋转气缸26转动,带动转盘25转动闭合下料漏斗口。系统接收到已将设备中加工好的工件从加工设备主体28中取出后,第二气缸16伸出,下料导口9到加工设备主体28下料口上方,第一气缸15收缩带动滑块7滑移,物料从装料匣14下落至引流漏斗8中,再经软管至下料口。
46.下料完毕后,第一气缸15、第二气缸16复位。此时,加工设备主体28对物料进行压塑,同时,旋转气缸26转动带动转盘25转动开启下料漏斗12口。压塑完毕后,螺母推杆27复位,上螺母装置复位,吹气杆10伸出对加工设备主体28的上螺母孔进行吹气。同时,第五气缸2运行,取件装置伸出到加工设备主体28的取件位后,第六气缸4运行将气动三爪卡盘5推入摩擦轮中,夹取并取出摩擦轮,回到储件支撑架1中放下工件。
47.至此,装置完成整个运行过程。
48.最后应该说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前叙述实施对本实用新型进行了详细的说明,本领域的技术人员应当理解,其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行同等替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神与范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。