1.本实用新型涉及机械手技术领域,尤其涉及一种新型机械手。
背景技术:
2.机械手是近几十年发展起来的一种高科技自动化生产设备。工业机械手是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
3.随着工业自动化的发展,出现了数控加工中心,它在减轻工人的劳动强度的同时,大大提高了劳动生产率。但数控加工中常见的上下料工序,通常仍采用人工操作或传统继电器控制的半自动化装置。前者费时费工、效率低;后者因设计复杂,需较多继电器,接线繁杂,易受车体振动干扰,而存在可靠性差、故障设计复杂,需较多继电器,接线繁杂,易受车体振动干扰,可靠性差、故障多、维修困难等问题。
4.在专利号为cn208531670u的实用新型中公开了一种机械手装置的放料机械手臂,该方案与本申请相比,本申请还设有图像传感器,能将图像信息传递至控制单元,操作更为便捷和准确。
技术实现要素:
5.本实用新型的主要目的在于提供一种新型机械手,通过控制系统控制机械手自动完成预设工作,伸缩平稳灵活、动作快捷、定位准确、工作协调,减少了人工劳动;装置设有图像传感器,能将图像信息传递至控制单元,操作更为便捷和准确。
6.为实现上述目的,本实用新型提出一种新型机械手,包括安装底座、第一动力臂、第二动力臂、转动轴承、机械手腕、机械手爪、伸缩导轨和控制系统;所述安装底座连接第一动力臂;所述第一动力臂通过转动轴承连接第二动力臂;所述第二动力臂连接机械手腕;所述机械手腕通过伸缩导轨连接机械手爪;所述第一动力臂、第二动力臂、机械手腕、机械手爪和伸缩导轨均与控制系统电控连接。
7.优选的,所述伸缩导轨设有缓冲回路。
8.优选的,所述机械手采用液压驱动系统作为动力元件;所述液压驱动系统包括回转液压缸、伸缩液压缸和油泵;所述回转液压缸固定设置于第一动力臂与安装底座连接端外部;所述伸缩液压缸固定设置于机械手腕和机械手爪连接处;所述油泵连接回转液压缸和伸缩液压缸。
9.优选的,所述机械手腕与机械手爪之间的设有转动盘。
10.优选的,所述机械手爪分为上手爪和下手爪;所述上手爪和下手爪与机械手腕连接端采用齿轮啮合。
11.优选的,所述上手爪和下手爪爪端均设为啮齿状。
12.优选的,所述机械手爪侧端设有与控制系统电控连接的图像传感器。
13.本实用新型的有益效果具体包括:
14.1)可通过控制系统控制机械手自动完成预设工作,伸缩平稳灵活、动作快捷、定位准确、工作协调,减少了人工劳动;
15.2)装置设有图像传感器,能将图像信息传递至控制单元,操作更为便捷和准确。
附图说明
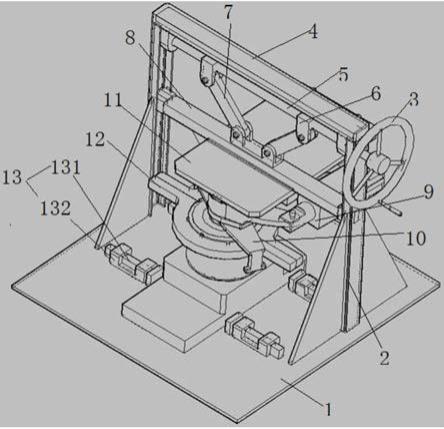
16.图1为本实用新型提出的一种新型机械手三维视图;
17.图2为本实用新型提出的一种新型机械手侧视图。
18.附图标号说明:
[0019]1‑
安装底座,2
‑
第一动力臂,3
‑
第二动力臂,4
‑
转动轴承,5
‑
机械手腕,6
‑
机械手爪,7
‑
伸缩导轨,8
‑
控制系统,9
‑
液压驱动系统,10
‑
回转液压缸,11
‑
伸缩液压缸,12
‑
上手爪,13
‑
下手爪,14
‑
图像传感器,15
‑
转动盘。
具体实施方式
[0020]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
[0021]
本实用新型提出了一种实施例,参照图1,图1为本实用新型提出的一种新型机械手三维视图。
[0022]
如图1
‑
2所示,在本实施例中,一种新型机械手,主要包括安装底座1、第一动力臂2、第二动力臂3、转动轴承4、机械手腕5、机械手爪6、伸缩导轨7、控制系统8、液压驱动系统9、回转液压缸10、伸缩液压缸11、上手爪12、下手爪13、图像传感器14和转动盘15。
[0023]
在本实施例中,安装底座1连接第一动力臂2;第一动力臂2通过转动轴承4连接第二动力臂3;第二动力臂3连接机械手腕5;机械手腕5通过伸缩导轨7连接机械手爪6;第一动力臂2、第二动力臂3、机械手腕5、机械手爪6和伸缩导轨7均与控制系统8电控连接。
[0024]
伸缩导轨7设有缓冲回路,使用单向节流阀;机械手采用液压驱动系统9作为动力元件;液压驱动系统9包括回转液压缸10、伸缩液压缸11和油泵;回转液压缸10固定设置于第一动力臂2与安装底座1连接端外部,实现第一动力臂2和第二动力臂3之间的回转运动;伸缩液压缸11固定设置于机械手腕5和机械手爪6连接处,实现机械手爪6的伸缩运动;油泵连接回转液压缸10和伸缩液压缸11,为机械手整体提供动力来源;机械手腕5与机械手爪6之间的设有转动盘15,使得机械手完成旋转这一动作;机械手爪6分为上手爪12和下手爪13;上手爪12和下手爪13与机械手腕5连接端采用齿轮啮合;上手爪12和下手爪13爪端均设为啮齿状,增强机械手爪6的抓紧力;机械手爪6侧端设有与控制系统8电控连接的图像传感器14,将机械手所采集的画面传输至控制系统8,使得机械手的操作更为便捷和准确。
技术特征:
1.一种新型机械手,其特征在于,包括安装底座(1)、第一动力臂(2)、第二动力臂(3)、转动轴承(4)、机械手腕(5)、机械手爪(6)、伸缩导轨(7)和控制系统(8);所述安装底座(1)连接第一动力臂(2);所述第一动力臂(2)通过转动轴承(4)连接第二动力臂(3);所述第二动力臂(3)连接机械手腕(5);所述机械手腕(5)通过伸缩导轨(7)连接机械手爪(6);所述第一动力臂(2)、第二动力臂(3)、机械手腕(5)、机械手爪(6)和伸缩导轨(7)均与控制系统(8)电控连接。2.如权利要求1所述的一种新型机械手,其特征在于,所述伸缩导轨(7)设有缓冲回路。3.如权利要求1所述的一种新型机械手,其特征在于,所述机械手采用液压驱动系统(9)作为动力元件;所述液压驱动系统(9)包括回转液压缸(10)、伸缩液压缸(11)和油泵;所述回转液压缸(10)固定设置于第一动力臂(2)与安装底座(1)连接端外部;所述伸缩液压缸(11)固定设置于机械手腕(5)和机械手爪(6)连接处;所述油泵连接回转液压缸(10)和伸缩液压缸(11)。4.如权利要求1所述的一种新型机械手,其特征在于,所述机械手腕(5)与机械手爪(6)之间的设有转动盘(15)。5.如权利要求1所述的一种新型机械手,其特征在于,所述机械手爪(6)分为上手爪(12)和下手爪(13);所述上手爪(12)和下手爪(13)与机械手腕(5)连接端采用齿轮啮合。6.如权利要求5所述的一种新型机械手,其特征在于,所述上手爪(12)和下手爪(13)爪端均设为啮齿状。7.如权利要求1所述的一种新型机械手,其特征在于,所述机械手爪(6)侧端设有与控制系统(8)电控连接的图像传感器(14)。
技术总结
本实用新型公开了一种新型机械手,包括:安装底座(1)、第一动力臂(2)、第二动力臂(3)、转动轴承(4)、机械手腕(5)、机械手爪(6)、伸缩导轨(7)和控制系统(8);安装底座(1)连接第一动力臂(2);第一动力臂(2)通过转动轴承(4)连接第二动力臂(3);第二动力臂(3)连接机械手腕(5);机械手腕(5)通过伸缩导轨(7)连接机械手爪(6);第一动力臂(2)、第二动力臂(3)、机械手腕(5)、机械手爪(6)和伸缩导轨(7)均与控制系统(8)电控连接。本实用新型通过控制系统(8)控制机械手自动完成预设工作,动作快捷;装置设有图像传感器(14),能将图像信息传递至控制单元,操作更为便捷和准确。操作更为便捷和准确。操作更为便捷和准确。
技术研发人员:何龙 张晓东 谢永权 陈铃
受保护的技术使用者:四川捷亮建设工程有限公司
技术研发日:2021.04.29
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。