机动化家具控制系统以及方法
1.相关申请的交叉引用
2.本技术要求享有于2020年3月31日提交的第16/836,884号美国专利申请的优先权,并且还要求享有于2019年4月1日提交的第62/827,774号美国临时申请的权益。上文所引用的申请的全部公开内容通过引用并入本文。
技术领域
3.本公开内容涉及机动化家具(motorized furniture),并且更具体地涉及用于对家具内的马达的电气控制的控制系统和方法。
背景技术:
4.用马达代替家具中的手动控制可以准许对家具的各种部件进行更精确并且可重复的设置。例如,记忆设置可以允许家具的不同占用者容易地并且可重复地定位家具以获得他们各自的最大舒适度。此外,机动化控制可以增强移动性降低的那些人对一些或所有特征的可用性。
5.然而,引入电动马达产生了工程问题,诸如当多个马达正在同时运行时的较大的电流汲取(current draw,电流消耗)。此外,当由于电力中断或电路断路器跳闸而导致墙壁电力不可用时,可能出现困难。此外,家具的用户界面要求注意,使得家具的使用是直观的、安全的并且人体工程学的。本公开内容中所描述的系统和方法处理并且解决了这些工程困难。
技术实现要素:
6.一种用于一件家具的控制系统包括:控制面板,被配置为接收来自用户的输入;控制模块,被配置为与所述控制面板通信并且控制耦合到该件家具的可移动部件的多个致动器;以及电池系统,被配置为存储来自干线供应的电力(mains electricity)的能量并且在不存在所述干线供应的电力时向所述控制模块提供所述能量。所述控制模块被配置为响应于来自所述用户的所述输入指示使所述可移动部件返回到相应的归位位置(home position)的意图而执行归位序列(homing sequence)。所述归位序列包括:根据指定顺序,选择所述多个致动器中的第一致动器。所述归位序列包括:根据所述可移动部件中的相应的一个可移动部件的所述归位位置,确定所选择的致动器的归位方位(home location)。所述归位序列包括:开始朝向所述归位方位驱动所选择的致动器。所述归位序列包括:根据所述指定顺序重复地选择所述多个致动器中的下一个致动器,并且为所述下一个致动器重复所述确定和所述开始。所述归位序列包括:确定是否存在所述干线供应的电力。所述归位序列包括:响应于确定不存在所述干线供应的电力,在阈值数目的所述多个致动器处于运转中时暂停所述重复地选择,并且一旦少于所述阈值数目的所述多个致动器处于运转中,重新开始所述重复地选择。
7.在其他特征中,所述可移动部件的所述归位位置对应于该件家具的最易于所述用
户退出的配置。在其他特征中,所述阈值数目是2。在其他特征中,所述控制模块被配置为根据所述电池系统的容量调整所述指定顺序。在其他特征中,所述可移动部件包括腿部支撑部件和头部支撑部件。所述控制模块被配置为响应于所述电池系统的所述容量在第一容量以下而按所述指定顺序在所述头部支撑部件之前放置所述腿部支撑部件。所述控制模块被配置为响应于所述电池系统的所述容量在所述第一容量以上而按所述指定顺序在所述腿部支撑部件之前放置所述头部支撑部件。
8.在其他特征中,所述控制模块被配置为响应于来自所述用户的所述输入指示使所述可移动部件移动到与所述归位位置不同的位置的第一配置的意图:确定是否存在所述干线供应的电力;以及响应于不存在所述干线供应的电力和所述电池系统的容量在第一容量以下的同时发生,忽略使所述可移动部件移动到所述第一配置的所述意图。在其他特征中,所述控制模块被配置为响应于来自所述用户的所述输入指示使所述可移动部件移动到所述第一配置的所述意图:确定是否存在所述干线供应的电力;以及响应于不存在所述干线供应的电力和所述电池系统的所述容量大于所述第一容量的同时发生,将同时移动的致动器的数目限制到特定数目。
9.在其他特征中,所述控制模块被配置为:从所述多个致动器读取位置数据;以及响应于表示所述可移动部件的意外配置的所述位置数据而设置不确定位置标志(indeterminate position flag)。所述控制模块被配置为响应于设置了所述不确定位置标志而执行所述归位序列。在其他特征中,所述控制模块被配置为响应于确定尚未为该件家具执行工厂定位序列而设置所述不确定位置标志。在其他特征中,所述控制模块被配置为响应于在所述控制模块的上电后确定在所述控制模块丢失电力时所述多个致动器中的至少一个处于运转中而设置所述不确定位置标志。
10.在其他特征中,所述控制系统包括在所述控制面板和所述控制模块之间的多导体连接器。所述控制面板被配置为:测量所述多导体连接器的预定导体上的电压并且根据所述电压解释用户输入。在其他特征中,所述控制面板被配置为接收第一用户输入和第二用户输入。所述控制面板被配置为响应于所述电压大于阈值,将所述第一用户输入解释为使所述多个制动器中的一个制动器在第一方向上移动的意图以及将所述第二用户输入解释为使所述多个致动器中的所述一个制动器在与所述第一方向相反的第二方向上移动的意图。所述控制面板被配置为响应于所述电压小于所述阈值,将所述第一用户输入解释为使所述多个致动器中的所述一个制动器在所述第二方向上移动的意图以及将所述第二用户输入解释为使所述多个致动器中的所述一个制动器在所述第一方向上移动的意图。在其他特征中,所述控制面板包括具有多个引脚的微控制器并且所述微控制器被配置为使用所述多个引脚中的预定的引脚来测量所述电压,并且随后使用所述预定的引脚从所述微控制器输出音频数据。
11.一种操作用于一件家具的控制系统的方法包括:接收来自用户的输入。所述方法包括:响应于来自所述用户的输入指示使该件家具的可移动部件返回到相应的归位位置的意图而执行归位序列。所述归位序列包括:根据指定顺序,选择所述多个致动器中的第一致动器。所述归位序列包括:根据所述可移动部件中的相应的一个可移动部件的所述归位位置,确定所选择的致动器的归位方位。所述归位序列包括:开始朝向所述归位方位驱动所选择的致动器。所述归位序列包括:根据所述指定顺序重复地选择所述多个致动器中的下一
个致动器,并且为所述下一个致动器重复所述确定和所述开始。所述归位序列包括:确定是否存在干线供应的电力。所述归位序列包括:响应于确定不存在所述干线供应的电力,在阈值数目的所述多个致动器处于运转中时暂停所述重复地选择,并且一旦少于所述阈值数目的所述多个致动器处于运转中,重新开始所述重复地选择。
12.在其他特征中,所述方法包括根据所述控制系统的电池系统的容量调整所述指定顺序。在其他特征中,所述可移动部件包括腿部支撑部件和头部支撑部件。所述方法包括响应于所述电池系统的所述容量在第一容量以下而按所述指定顺序在所述头部支撑部件之前放置所述腿部支撑部件。所述方法包括响应于所述电池系统的所述容量在所述第一容量以上而按所述指定顺序在所述腿部支撑部件之前放置所述头部支撑部件。
13.在其他特征中,所述方法包括:响应于来自所述用户的所述输入指示使所述可移动部件移动到与所述归位位置不同的位置的第一配置的意图:确定是否存在所述干线供应的电力;以及响应于不存在所述干线供应的电力和所述控制系统的电池系统的容量在第一容量以下的同时发生,忽略使所述可移动部件移动到所述第一配置的所述意图。在其他特征中,所述方法包括:响应于来自所述用户的所述输入指示使所述可移动部件移动到所述第一配置的所述意图:确定是否存在所述干线供应的电力;以及响应于不存在所述干线供应的电力和所述电池系统的所述容量大于所述第一容量的同时发生,将同时移动的致动器的数目限制到特定数目。
14.在其他特征中,所述方法包括:从所述多个致动器读取位置数据。所述方法包括:响应于表示所述可移动部件的意外配置的所述位置数据而设置不确定位置标志。所述方法包括:响应于设置了所述不确定位置标志而执行所述归位序列。在其他特征中,所述方法包括:响应于确定在所述干线供应的电力丢失时所述多个致动器中的至少一个处于运转中而设置所述不确定位置标志。
15.从详细描述、权利要求书和附图,本公开内容的另一些适用性领域将变得明显。详细描述和具体示例仅意在用于例示目的,并不意在限制本公开内容的范围。
附图说明
16.通过详细的描述和附图,本公开内容将被更充分地理解。
17.图1是根据本公开内容的原理的家具控制模块的一个示例实施方式的功能块图。
18.图2是根据本公开内容的原理的家具控制模块的另一个示例实施方式的功能块图。
19.图3是示出了家具控制模块的示例初始化操作的流程图。
20.图4是用户界面控制面板的示例初始化操作的流程图。
21.图5是示出了家具内的致动器的示例移动操作的流程图。
22.图6是用于跟踪家具致动器的移动结束的示例操作的流程图。
23.图7是示出了使家具返回到归位配置(home configuration)的示例操作的流程图。
24.图8是示出了使家具移动到预定记忆位置的示例操作的流程图。
25.图9是新的控制模块和新的无线遥控器之间的无线通信序列的图形表示。
26.图10是绑定的控制模块和绑定的无线遥控器之间的无线通信序列的图形表示。
27.图11是绑定的控制模块和绑定的无线遥控器之间的可替代的无线通信序列的图形表示。
28.图12是绑定的控制模块和新的无线遥控器之间的无线通信序列的图形表示。
29.图13是新的控制模块和绑定的无线遥控器之间的无线通信序列的图形表示。
30.图14是响应于用户按压无线遥控器上的连接按钮的无线通信序列的图形表示。
31.图15是用于蓝牙低能量(bluetooth low energy,蓝牙低功耗)远程连接的状态机器的图形表示。
32.图16是描述了响应于按压连接按钮而执行的操作的流程图。
33.图17是示例无线广告操作(wireless advertising operation)的流程图。
34.图18是用于连接到控制模块的遥控器的示例操作的流程图。
35.图19是与控制模块断开连接的遥控器的示例操作的流程图。
36.图20是用于控制模块蓝牙低能量连接的图形状态机器。
37.图21是在新的连接上电窗口期间控制模块的示例操作的流程图。
38.图22是通过控制模块进行的示例扫描操作的流程图。
39.图23是通过控制模块进行的示例连接操作的流程图。
40.图24是当连接到遥控器时控制模块的示例操作的流程图。
41.在附图中,可以重复使用参考数字来标识类似的和/或相同的元件。
具体实施方式
42.块图
43.图1示出了控制模块100,也称为家具控制模块或主控制模块(mcm)。控制模块100接收用户输入,诸如经由控制面板104,并且控制一个或多个致动器108
‑
1、
……
108
‑
n(统称为致动器108)。
44.控制模块100包括接收墙壁电力(也称为电网电力、公用电力或干线供应的电力)的电力系统112。例如,电源(power supply)116(其可以是外部的,如图1中所示出的)可以接收墙壁电力并且调节或转换该电力。例如,电源116可以将墙壁电力转变为较低电压的交流电,或可以将墙壁电力转换为直流电源。仅作为示例,墙壁电力可以是230伏特50赫兹交流电电力或120伏特60赫兹交流电。
45.电力系统112还可以被配置为从电池组118接收电力。电池组118可以是可再充电电池组,在此情况下,电力系统112可以能够基于来自电源116的电力为电池组118再充电。在其他实施方式中,电池组118可以包括不可再充电电池,诸如9v碱性电池。在各实施方式中,可再充电电池组和不可再充电电池组二者都可以被提供并且被连接到电力系统112。
46.控制面板104包括家具控制件120,该家具控制件120可以是一个或多个触摸激活的或压力激活的输入装置。例如,家具控制件120可以包括按钮、翘板开关(rocker switch)、触敏按钮、触摸屏等。如图1中所示出的,控制面板104包括控制器124,该控制器124从家具控制件120读取输入并且经由控制模块100的总线收发器128将该输入传输到控制模块100。
47.例如,控制器124可以响应于对家具控制件120的按钮的瞬间按压而向总线收发器128发送总线消息。响应于对家具控制件120的按钮之一的按压和保持,控制器124可以向总
线收发器128发送按钮按压消息,随后是按钮释放消息。在其间,控制器124可以继续向总线收发器128发送“按钮保持按压”消息。
48.为了用户方便,控制面板104可以包括一个或多个通用串行总线(usb)充电器132。尽管被示出于控制面板104的轮廓内,usb充电器132中的一个或多个可以与控制面板104分立地定位。例如,为了用户方便,usb充电器132可以被分布在一件家具的左侧和右侧之间。为了为usb充电器132供电,适当的电压源——诸如5v电源136为控制面板104提供电力。例如,5v电源136可以为向控制面板104提供电力的总线收发器128供电。
49.控制模块100的系统控制器140经由总线收发器128接收关于用户输入的信息。系统控制器140还可以控制usb充电器132是否是有效的(active)。响应于停用(deactivate)usb充电器132的命令,控制器124可以切断流向一些或全部usb充电器132的电力。
50.在存在多组致动器的家具中,诸如在具有多个斜靠就坐位置的沙发中,系统控制器140可以与对应的控制模块协调。在图1中,示出了第二控制模块144以用于例示。连接到总线收发器128的服务接口148可以准许制造设施处的装配工或修理设施处的技术员获得诊断信息、执行校准和解决问题。在各实施方式中,总线收发器128可以使用本地互连网络(lin)总线的变体。
51.控制模块100使用继电器控制系统152来控制致动器108。当控制致动器108
‑
1时,继电器控制系统152可以感测供应给致动器108
‑
1的电流的量。此外,继电器控制系统152可以从致动器108
‑
1接收定位反馈。例如,位置反馈可以包括来自编码器的计数,所述计数可以使用霍尔效应传感器来检测。如下文更详细描述的,如果致动器最近停止移动或当从控制模块100移除电力时实际上仍然正在移动,此位置反馈可能不是完全可靠的。
52.系统控制器140可以从其他源——诸如一个或多个模拟传感器156——接收输入。模拟传感器156可以包括占用传感器(occupancy sensor)。模拟接口160从模拟传感器156接收信息并且转变该信息——诸如通过转换为数字信号——以用于提供给系统控制器140。
53.除了控制所述致动器108之外,控制模块100还可以生成附加的输出。例如,控制模块100的输出接口164可以控制一个或多个加热器168、一个或多个按摩马达172、以及一个或多个用户输出装置176。例如,用户输出装置176可以包括触觉反馈致动器、音频输出装置、照明装置等中的一个或多个。在各实施方式中,输出接口164可以输出脉宽调制(pwm)信号。
54.在图2中,控制器架构的无线遥控器变体包括控制模块200。控制模块200包括与遥控器208无线通信的蓝牙收发器204。遥控器208包括蓝牙收发器212、家具控制件216、霍尔效应传感器220和电池组224。家具控制件216可以与图1的家具控制件120相同或是其重新布置的形式。
55.当未处于使用中时,遥控器208可以被存储在遥控器托架228中。尽管未示出,遥控器托架228可以在遥控器208定位在遥控器托架228中时为遥控器208的电池组224充电。遥控器托架228可以包括磁体232,该磁体232可以被遥控器208的霍尔效应传感器220检测,以向遥控器208指示该遥控器被定位在遥控器托架228中。
56.遥控器托架228可以包括家具控制件236,该家具控制件236可以是家具控制件216的超集或子集。在各实施方式中,家具控制件236可以包括指示用户期望将家具返回到归位
位置和/或一个或多个记忆位置的输入。此外,家具控制件236还可以包括用于将遥控器208与控制模块200配对的控制件。
57.在各实施方式中,遥控器托架228还可以包括一个或多个usb充电器240。如上文关于图1所描述的,usb充电器240可以不全部被共同定位在遥控器托架228中。usb充电器240可以从5v电源244接收电力。5v电源244可以与图1的5v电源136相同。5v电源244可以是系统控制器140可控制的,以中断到usb充电器240的电力来停用usb充电器240。例如,当用电池电力而不是墙壁电力运行时,usb充电器240可以被停用。
58.相同的参考数字被用于系统控制器140,尽管与控制模块200相比,单独的系统控制器可以被用于控制模块100。在图1和图2中所示出的示例中,系统控制器140以相同的参考数字示出,以指示共同的软件和硬件可以被用于系统控制器140,尽管软件可以根据系统控制器140是否存在于控制模块100或控制模块200中而不同地运行。控制模块200可以包括控制监测器248,该控制监测器248扫描家具控制件236。例如,控制监测器248可以监测通过家具控制件236中的每个的电阻以检测按钮是否正在被按压。然后,控制监测器248将此信息供应给系统控制器140。
59.流程图
60.在图3中,初始化控制开始于300处。例如,此控制可以由控制模块100或控制模块200执行。在300处,控制关闭致动器并且关闭usb充电器。在304处,控制为致动器清除过电流标志。在308处,控制启用看门狗计时器(watchdog timer)。看门狗计时器可以防止控制软件无意地陷入无限循环中。
61.在312处,控制建立致动器到家具部件的映射。例如,此映射可以是预定的表,该预定的表指示哪个致动器对应于躺椅的哪个部段:诸如头靠、搁脚板、腰部、靠背和腿支托。控制在316处继续并且确定是否已经对家具执行了工厂定位。如果是这样的话,控制转移到320;否则,控制转移到324。
62.在320处,控制确定当前是否设置了任何移动标志。如果是这样的话,控制转移到324;否则,控制转移到328。在致动器正在移动时设置移动标志,并且在该移动停止时清除移动标志。在一些实施方式中,诸如图8中所描述的实施方式中,可以在移动结束之后的一预定时间段清除标志。在324处,工厂定位尚未执行或电力被过早地从控制模块移除,因此控制设置标志(actuator_pos_suspect)以指示一个或多个致动器的位置是可疑的。然后初始化控制结束。致动器位置可疑(actuator_pos_suspect)标志也可以称为不确定位置标志。
63.在328处,致动器的位置被假定为准确的并且因此被从存储器读取以用于在致动器控制中使用。在332处,控制评估位置数据是否表现得有效。例如,这可以检查位置数据是否在界限内以及是否存在任何不兼容的数据片段。例如,腿支托和搁脚板可能不能够在某些不兼容的配置中被调整,并且反映这样的不兼容的配置的位置数据将被假定为无效的。如果位置数据表现得有效,控制结束;否则,控制返回到324。
64.在图4中,控制面板——诸如图1的控制面板104——的初始化操作开始于400处。在各实施方式中,控制面板104可以替代地被定位在一件家具的左侧或右侧。此决定可以基于买家偏好,诸如避免将控制面板104直接紧挨着茶几放置。
65.控制面板104可以是可在家具的多个侧之间互换的。然而,基于控制面板104位于
家具的哪一侧,家具控制件120可以具有相反的效果。例如,当控制面板104位于相反侧时,延伸和缩回腿支托的翘板开关可以替代地缩回和延伸腿支托。在图4中,一种确定控制面板104安装在哪一侧的方法依赖于硬件差异。
66.例如,将控制面板104连接到控制模块100的缆线可以根据控制面板104是位于一件家具的左侧还是右侧而具有不同的长度和不同的布置。这两个配置中的两个缆线可以在电气上被不同地配置。例如,在一个配置中,缆线可以省略电线中的一个。此省略可以根据图4所示出的操作由控制面板104检测。
67.在400处,控制器(诸如控制面板104的控制器124)检查一个特定的引脚。在404处,如果该引脚被拉高,控制转移到408;否则,控制转移到412。该引脚可以通过连接回到控制模块的电线被拉高。例如,控制模块处的上拉电阻器可以将到引脚的电压拉至正电源电压。然而,如果该引脚未被拉高(在412处),这指示从缆线省略电线。
68.在图4的示例中,从缆线省略电线(412)对应于控制面板104被定位在家具的右侧的配置。因此,右手定向被用来解释用户控制。在408处,存在电线,并且因此根据控制面板被安装在家具的左侧来解释用户控制。在两种情况下,控制在416处继续,其中该引脚可以在用于音频输出的初始化后被使用。例如,该音频输出可以被用来提供指示家具的当前配置何时被成功地存储为记忆位置的反馈。然后控制结束。
69.图5示出了在控制致动器移动时使用的示例操作。致动器移动可以根据手动用户控制、根据归位序列、或根据记忆序列被发起。在一些实施方式中,归位序列可以不是由用户而是由系统控制器明确地发起,诸如以校准致动器的位置或在电力故障之后返回到起始点。
70.对特定的致动器的移动控制开始于500处,其中控制确定当前的时间是否超过该特定的致动器的停止时间后的200ms。200ms的值是预定的并且可以基于马达的参数以及由马达操作的部件的机械特性。此预定间隔防止同一致动器开始移动的时间太靠近前一移动结束的时间。如果当前的时间减去致动器的上一次停止大于200ms,控制转移到504;否则,控制保持在500处。
71.在504处,控制确定全局启动计时器是否超过阈值。如果是这样的话,控制转移到508;否则,控制保持在504处。每次致动器开始移动都重置全局启动计时器。为避免电源在同一时间经历来自多个马达的高启动电流,使用阈值(在本示例中为50ms)来使马达的启动时间错开。50ms的值可以由设计者根据经验确定为电流已经下降到启动电流的预定百分比(诸如50%)的时间。
72.在508处,控制确定家具是否正在用墙壁电力运行。如果是这样的话,控制在512处继续;否则,控制转移到516。在516处,控制确定当前处于运转中的致动器的数目。在520处,控制将该数目与阈值(诸如2)进行比较。如果该数目大于或等于该阈值,控制转移到524;否则,控制在512处继续。
73.此阈值可以被设置为使得在任何时间仅一定数目的致动器正在运行,以防止在非墙壁电力源(换言之,电池组)上的电流汲取过多。较高的电流汲取可以减少由电池组存储的电荷,并且甚至可以降低电池组的整体寿命和长期电荷存储容量。在524处,控制确定用户是否已释放所有按钮。如果是这样的话,控制返回504;否则,控制保持在524处。出于安全和可用性原因,可以暂停进一步的致动器移动,直到所有按钮都已经被释放。
74.在512处,控制将运行中的全局启动计时器重置到零。在528处,控制为目前的致动器设置移动标志。该移动标志可以被存储在非易失性存储器中,使得其在电力丢失或关机期间将被保留。在532处,控制在所命令的方向上驱动致动器。在536处,控制将致动器的停止时间更新为当前的时间。停止时间的此更新在致动器正在移动时继续,使得停止时间总是反映致动器正在移动的上一次时间。
75.控制在540处继续,其中控制确定移动命令是否仍然是有效的。如果是这样的话,控制转移到544;否则,控制转移到548。例如,移动命令可能不再是有效的,因为用户已经停止按压对应的按钮。在另一个实例中,移动命令可能不是有效的,因为已经到达预定的记忆位置。
76.在544处,控制确定致动器电流是否大于零。如果是这样的话,控制转移到552;否则,控制转移到556。在556处,致动器电流已达到零,并且因此假定致动器已经到达其行程的终点。因此,控制基于此假定校准致动器位置。然后,控制在548处继续。在548处,控制清除用于致动器的过电流标志并且控制结束。换句话说,响应于致动器的移动自然终止——换言之,响应于致动器到达行程的终点或对致动器移动结束的请求,清除过电流标志。
77.在552处,控制确定当前测量的致动器电流是否超过限制。如果是这样的话,控制转移到560;否则,控制在532处继续。在560处,控制确定是否已经为致动器设置了过电流标志。如果是这样的话,控制转移到564;否则,控制转移到568。在564处,控制停止所有致动器并且可以防止目前的致动器再次移动直到已经执行重置。控制在572处继续,其中控制保持直到所有按钮都已经被释放。一旦所有按钮都已经被释放,控制结束。在568处,尚未为致动器设置过电流标志,指示过电流事件可能是瞬时的。尽管如此,控制停止所有致动器并且在576处继续。在576处,控制为目前的致动器设置过电流标志并且在524处继续。
78.在图6中,跟踪致动器的移动结束开始于600处。选择第一致动器并且控制在604处继续。在604处,控制确定当前是否为所选择的致动器设置了移动标志。如果是这样的话,控制转移到608;否则,控制转移到612。在612处,控制确定是否存在附加的致动器。如果是这样的话,控制转移到616;否则,控制返回到600以开始再次处理所有致动器。
79.在616处,控制选择下一个致动器并且在604处继续。在608处,控制确定当前的时间是否超过所选择的致动器的上一次停止时间之后的一预定间隔。如果是这样的话,控制转移到620;否则,控制转移到612。该预定间隔可以是2秒。在620处,控制为所选择的致动器清除移动标志。如上文所述,移动标志可以被设置在非易失性存储器中,以在电力中断和关机期间持续存在。控制在624处继续,其中对所选择的致动器的位置的当前理解被写入非易失性存储器。然后,控制在612处继续。
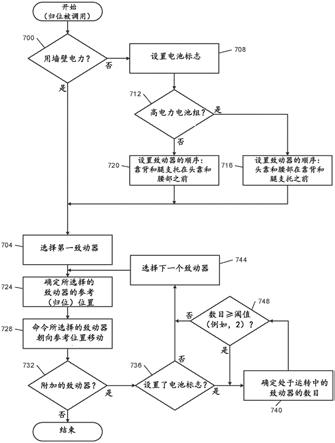
80.在图7中,在调用归位操作后控制开始于700处。如上文所提到的,可以通过明确的用户输入或为了返回到家具的已知参考状态来调用归位操作。例如,可以在电力中断之后或响应于致动器的位置是可疑的而调用参考状态。在700处,控制确定家具是否正在用墙壁电力运行。如果是这样的话,控制转移到704;否则,控制转移到708。
81.在各实施方式中,控制可以基于电力输入的电压确定家具是否正在用墙壁电力运行。例如,根据墙壁电力运行的电源可以供应比电池组供应的电压更高的电压。在708处,控制设置电池标志以指示家具正在用电池电力运行。控制在712处继续,其中控制确定电池组是否是相对较高电力的。如果是这样的话,控制转移到716;否则,控制转移到720。
82.当电池组的电荷存储容量较高时,电池组可以具有相对较高电力。例如,较高的电荷存储容量可以对应于锂离子可再充电电池组,而相对较低电力的电池组可以是一组9v碱性电池。可以基于电池组的电压输出推断电池组的身份。例如,可再充电电池组的电压可以被设计为高于碱性电池组的电压。
83.在716处,控制建立致动器进行归位移动的顺序。例如,可以在靠背和腿支托被致动之前,致动头靠和腰部。然后,控制在704处继续。同时,在720处,不同地设置致动器的顺序。例如,可以在移动头靠致动器和腰部致动器之前移动靠背和腿支托致动器。控制也在704处继续。
84.在704处,控制选择致动器的有序列表中的第一致动器。在724处,控制确定所选择的致动器的参考(它的初始)安装。在各实施方式中,可以与在图3中执行致动器到家具部件的映射同时建立这些参考位置。换句话说,腿支托致动器可以具有对应于其与腿支托的关联的预定参考位置。
85.在728处,控制命令所选择的致动器朝向参考位置移动。例如,这可以调用图5的用于所选择的致动器的控制。在732处,控制确定列表中是否还存在仍然需要朝向参考位置移动的附加的致动器。如果是这样的话,控制转移到736;否则,控制已经移动所有致动器并且控制结束。
86.在736处,控制确定是否设置了电池标志。如果是这样的话,控制转移到740;否则,控制转移到744。在740处,控制确定当前处于运转中的致动器的数目。在748处,控制确定该数目是否大于或等于阈值,诸如二。为防止太多的致动器在用电池电力时同时移动,控制返回到740,直到致动器的数目下降到阈值以下。然后,控制在744处继续。在744处,控制选择下一个致动器并且在724处继续。
87.在图8中,当记忆位置已经被调用时,控制开始。在800处,控制确定家具是否正在用墙壁电力运行。如果是这样的话,控制转移到804;否则,控制转移到808。在804处,控制确定指示致动器位置可能可疑的标志是否被设置。如果是这样的话,控制转移到812;否则,控制转移到816。在812处,控制调用归位序列(参见图7)。在各实施方式中,当致动器位置可疑时对记忆位置的初始请求可以导致家具返回到参考位置并且要求在控制将移动到记忆位置之前第二次选择记忆位置。在这样的情形下,控制在812后结束。
88.返回参考808,控制确定电池组是否是相对高电力的。如果是这样的话,控制转移到820;否则,在较低电力的电池组的情况下,可以禁止基于记忆的移动并且控制结束。在820处,控制设置电池标志并且在804处继续。在816处,控制选择第一致动器。在824处,控制确定所选择的致动器的存储的记忆位置。在828处,控制命令该致动器朝向存储的记忆位置移动。在832处,控制确定是否存在任何附加的致动器要朝向存储的记忆位置移动。如果是这样的话,控制转移到836;否则,控制结束。
89.在836处,如果设置了电池标志,控制转移到840;否则,控制转移到844。在840处,控制确定当前处于运转中的致动器的数目。控制在848处继续,其中如果该数目等于或大于阈值,控制返回到840;否则,控制转移到844。在844处,控制选择下一个致动器并且在824处继续。
90.无线连接
91.图9是新的控制模块和新的无线遥控器之间的无线通信序列的图形表示。
92.图10是绑定的控制模块和绑定的无线遥控器之间的上电后的无线通信序列以及恢复供电到绑定的无线遥控器后的无线通信序列的图形表示。
93.图11是恢复供电到绑定的控制模块后的绑定的控制模块和绑定的无线遥控器之间的无线通信序列的图形表示。
94.图12是绑定的控制模块和新的无线遥控器之间的无线通信序列的图形表示。
95.图13是新的控制模块和绑定的无线遥控器之间的无线通信序列的图形表示。
96.图14是响应于用户按压无线遥控器上的连接按钮的无线通信序列的图形表示。
97.图15描绘了无线遥控器将遵循的用于建立和维持与主控制模块(mcm)的连接的示例高水平过程。在上电时,遥控器将检查白名单以查看是否存储了先前的连接。如果是这样的话,遥控器将开始广告以重新连接到mcm。如果白名单中未存储任何连接,在连接按钮被按压之前,遥控器不会广告。mcm和遥控器意在在二者被上电的整个时间维持蓝牙低能量(ble)连接。电力丢失、噪音和其他事件可以导致链路被断开连接。在以下部分中详述了关于如何恢复连接的细节。
98.图16描述了当遥控器处于任何状态(除广告状态之外)并且连接按钮被按压时所遵循的示例步骤。无论当前状态如何,连接按钮都允许遥控器强行进入广告状态。如果在处于广告状态时按压连接按钮,这将改变广告数据包中的标志数据以发送出0x05的值并且允许发生到遥控器的新的连接。当遥控器处于无连接(no connection)状态时,按压连接按钮将是用于移动到广告状态的唯一方法。
99.在图17中,在进入广告状态后,遥控器将开始发送出广告数据包并且将开始广告暂停时间(timeout)。如果mcm在广告窗口期间发送连接请求,遥控器将在以下情况下连接到它。如果连接按钮已经被按压,遥控器将连接到发送连接请求的第一mcm。遥控器将从白名单清除任何已保存的连接(如果存在的话),并且新的连接信息将被存储。然后遥控器和mcm将绑定。一旦绑定完成,遥控器将执行产品行为规范中定义的“新的连接序列(new connection sequence)”。
100.如果连接按钮未被按压,遥控器将仅连接到存储在其白名单中的连接,并且将拒绝不在白名单中的任何连接请求。在重新连接后,将不执行“新的连接序列”。如果广告窗口到期,并且还没有成功连接,广告数据包将停止被发送出。然后将如流程图中所描述的基于白名单确定遥控器的状态。
101.在图18中,当遥控器连接到mcm时,连接链路将被监测。如果由于任何原因与mcm的连接丢失,遥控器状态将改变到广告(advertising)。在已连接(connected)状态期间可以按压连接按钮。在此情况下,将遵循图16中的细节。
102.参考图19,当存在存储在白名单中的连接时,遥控器将处于断开连接(disconnected)状态,但是在广告窗口期间未能重新连接到mcm。当处于此状态中时,遥控器将监测按键和加速度计,以确定用户是否已经拾起或触摸任何按键。如果发生这些事件中的任何一个,遥控器将移动到广告状态以重新连接到mcm。在断开连接状态期间可以按压连接按钮。在此情况下,将遵循图16中的细节。
103.参考图20,以下部分描绘了mcm将遵循的用于建立和维持与遥控器的连接的示例高水平过程。在上电时,mcm将检查白名单以查看是否存储了先前的连接。如果是这样的话,mcm将开始重新连接到该存储的连接的过程。如果白名单中未存储连接,mcm将不采取行动
连接到遥控器。mcm和遥控器意在在二者被上电的整个时间维持ble连接。电力丢失、噪音和其他事件可以导致链路被断开连接。在以下部分中详述了关于如何恢复连接的细节。
104.参考图21,在上电时,mcm将启动计时器。如果在前2分钟内按压寻找我(find me)/永不丢失(never lost)按键,并且mcm处于无连接(no connection)状态或正在连接(connecting)状态,mcm将进入扫描状态。这允许不具有存储在白名单中的连接的mcm开始扫描待连接到的遥控器。它还允许具有建立的连接的mcm开始扫描新的连接。
105.参考图22,在进入扫描状态后,mcm将启动扫描计时器并且开始扫描ble广告数据包。如果在扫描窗口内检测到遥控器广告数据包,mcm上的白名单将用新的连接进行更新(如果先前的连接存在的话)并且移动到正在连接状态。如果在扫描窗口期间未检测到遥控器广告数据包,mcm将停止扫描ble广告数据包。如果连接被存储在白名单中,mcm将移动到正在连接状态,以试图连接到先前的连接。如果白名单是空的,mcm将移动到无连接状态。
106.参考图23,当处于正在连接状态中时,mcm将持续向其白名单中的连接发送连接请求。如果建立连接,mcm将移动到已连接状态。存在正在连接状态的唯一其他方式是在图21中所详述的新的连接上电窗口期间使用寻找我/永不丢失按键。
107.参考图24,当mcm连接到遥控器时,连接链路将被监测。如果由于任何原因与遥控器的连接丢失,mcm状态将改变到连接。
108.结论
109.前述的描述本质上仅是例示性的,并且决不意在限制本公开内容、其应用或用途。本公开内容的广泛教导可以各种各样的形式实施。因此,虽然本公开内容包括具体示例,但是本公开内容的真正范围不应被如此限制,因为在研究附图、说明书和以下权利要求后,其他改型将变得明显。应理解,在不更改本公开内容的原理的情况下,可以按不同的顺序(或同时地)执行一种方法内的一个或多个步骤。此外,尽管上文将每个实施方案描述为具有某些特征,关于本公开内容的任何实施方案所描述的那些特征中的任何一个或多个可以被实施在任何其他实施方案中和/或与任何其他实施方案的特征结合,即使没有明确地描述该组合。换句话说,所描述的实施方案不是相互排斥的,并且一个或多个实施方案彼此之间的排列仍然在本公开内容的范围内。
110.使用各种术语——包括“连接”、“接合”、“接口连接”和“耦合”——来描述元件之间(例如,模块之间)的空间和功能关系。除非明确描述为“直接的”,当在上文的公开内容中描述第一元件和第二元件之间的关系时,该关系包含在第一元件和第二元件之间不存在其他中间元件的直接关系,以及在第一元件和第二元件之间存在(在空间上或在功能上)一个或多个中间元件的间接关系。如本文所使用的,短语a、b和c中的至少一个应被解释为意指逻辑(a or b or c),使用非排他性逻辑or,并且不应被解释为表示“a中的至少一个、b中的至少一个,和c中的至少一个。”111.在附图中,箭头的方向,如由箭头指示的,通常展示例示所感兴趣的信息(诸如数据或指令)的流。例如,当元件a和元件b交换各种各样的信息、但是从元件a传输到元件b的信息与例示相关时,箭头可以从元件a指向元件b。此单向箭头并不意味着没有其他信息从元件b传输到元件a。此外,对于从元件a发送到元件b的信息,元件b可以向元件a发送对信息的请求或信息的接收确认。术语子集不一定需要真子集(proper subset)。换句话说,第一集合的第一子集可以与第一集合同延(相等)。
112.在本技术中,包括下文的定义,术语“模块”或术语“控制器”可以由术语“电路”替换。术语“模块”可以指代处理器硬件(共享的、专用的、或组)和存储器硬件(共享的、专用的、或组)、作为该处理器硬件和该存储器硬件的一部分或包括该处理器硬件和该存储器硬件,所述处理器硬件执行代码,所述存储器硬件存储由处理器硬件执行的代码。
113.模块可以包括一个或多个接口电路。在一些示例中,接口电路可以实现连接到局域网(lan)或无线个人局域网(wpan)的有线或无线接口。lan的示例是电气和电子工程师协会(ieee)标准802.11
‑
2016(也称为wifi无线网络标准)和ieee标准802.3
‑
2015(也称为ethernet有线网络标准)。wpan的示例是来自蓝牙特别兴趣小组的bluetooth无线网络标准和ieee标准802.15.4。
114.模块可以使用接口电路与其他模块通信。尽管在本公开内容中模块可以被描述为在逻辑上直接与其他模块通信,在各实施方式中,模块实际上可以经由通信系统进行通信。通信系统包括物理和/或虚拟网络装备,诸如集线器、交换机、路由器和网关。在一些实施方式中,通信系统连接到或穿越广域网(wan),诸如因特网。例如,通信系统可以包括使用包括多协议标签交换(mpls)和虚拟专用网络(vpn)的技术通过互联网或点对点租用线路相互连接的多个lan。
115.在各实施方式中,模块的功能可以分布在经由通信系统连接的多个模块之间。例如,多个模块可以实现由负载平衡系统分布的相同功能。在另一个示例中,模块的功能可以在服务器(也称为远程或云)模块和客户端(或用户)模块之间进行拆分。
116.术语代码,如上文所使用的,可以包括软件、固件和/或微代码,并且可以指代程序、例程、函数、类、数据结构和/或对象。共享处理器硬件包含执行来自多个模块的一些或全部代码的单个微处理器。组处理器硬件包含与附加的微处理器结合执行来自一个或多个模块的一些或全部代码的微处理器。对多个微处理器的提及包含分立管芯上的多个微处理器、单个管芯上的多个微处理器、单个微处理器的多个核、单个微处理器的多个线程或上述的组合。
117.共享存储器硬件包括存储来自多个模块的一些或全部代码的单个存储器设备。组存储器硬件包含与其他存储器设备结合存储来自一个或多个模块的一些或全部代码的存储器设备。
118.术语存储器硬件是术语计算机可读介质的子集。术语计算机可读介质,如本文所使用的,不包含通过介质(诸如在载波上)传播的瞬时性电或电磁信号;因此,术语计算机可读介质被认为是有形并且非暂时性的。非暂时性计算机可读介质的非限制性示例是非易失性存储器设备(诸如闪存设备、可擦除可编程只读存储器设备或掩模只读存储器设备)、易失性存储器设备(诸如静态随机存取存储器设备或动态随机存取存储器设备)、磁存储介质(诸如模拟或数字磁带或硬盘驱动器)和光存储介质(诸如cd、dvd或蓝光光盘)。
119.本技术中所描述的装置和方法可以部分地或完全地由通过将通用计算机配置为执行体现在计算机程序中的一个或多个特定功能创建的专用计算机实施。上文所描述的功能块和流程图元件用作软件说明书,其可以通过熟练技术员或程序员的常规作业被翻译成计算机程序。
120.计算机程序包括存储在至少一个非暂时性计算机可读介质上的处理器可执行指令。计算机程序还可以包括或依赖于存储的数据。计算机程序可以包含与专用计算机的硬
件交互的基本输入/输出系统(bios)、与专用计算机的特定设备交互的设备驱动程序、一个或多个操作系统、用户应用程序、后台服务、后台应用程序等。
121.计算机程序可以包括:(i)待被解析的描述性文本,诸如html(超文本标记语言)、xml(可扩展标记语言)或json(javascript object notation),(ii)汇编代码,(iii)通过编译器由源代码生成的目标代码,(iv)用于由解释器执行的源代码,(v)用于由即时编译器编译和执行的源代码等。仅作为示例,可以使用来自以下语言的语法编写源代码,所述语言包括c、c 、c#、objective
‑
c、swift、haskell、go、sql、r、lisp、fortran、perl、pascal、curl、ocaml、html5(超文本标记语言第5版)、ada、asp(active server page,活动服务器页面)、php(php:超文本预处理器)、scala、eiffel、smalltalk、erlang、ruby、visuallua、matlab、simulink以及
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。