1.本发明涉及一种梯子,尤其涉及一种用于工地便捷行走的梯子。
背景技术:
2.在工地中高空作业和低空作业是非常普遍的,且由于低空作业不便于搭建工手架,所以现在的工地中进行低空作业时,工人大部分是依靠伸缩梯或者伸缩人字梯进行工作,现有大部分人字梯移动不便,同时无任何椅靠部件,并且稳定性不高。
3.针对于上述人字梯存在的缺点,我们设计出了这样一种能根据需要快速更换位置,同时架设方便舒适度较高,并且能有效提高稳定性的用于工地便捷行走的梯子。
技术实现要素:
4.为了克服大部分人字梯移动不便,同时无任何椅靠部件,并且稳定性不高的缺点,本发明的技术问题:提供能根据需要快速更换位置,同时架设方便舒适度较高,并且能有效提高稳定性的用于工地便捷行走的梯子。
5.技术方案是:一种用于工地便捷行走的梯子,包括有第一梯脚、第二梯脚和第一连接固定杆,第一梯脚左右两侧前端均间隔设有第一连接固定杆,第一连接固定杆数量为八根,位于同一侧的第一连接固定杆前端连接有第二梯脚,其特征在于:还包括有便捷机构,第一梯脚和第二梯脚左右两侧底部之间设有便捷机构,其特征在于:还包括有,旋转机构,第二梯脚前侧设有旋转机构。
6.进一步的是,还包括有便捷机构,便捷机构包括有轮子、第一固定轮块和旋转杆,第一梯脚和第二梯脚左右两侧底端均焊接有第一固定轮块,第一固定轮块数量为四个,位于同一侧的第一固定轮块之间转动式设有旋转杆,旋转杆数量为两根,两根旋转杆前后两侧均连接有轮子,轮子数量为八个。
7.作为优选,还包括有旋转机构,旋转机构包括有第二连接固定杆、旋转轮块、第二固定轮块和连接带,第二梯脚上部前侧连接有第二连接固定杆,第二连接固定杆中部转动式设有旋转轮块,两根旋转杆前部均连接有第二固定轮块,旋转杆与旋转轮块之间连接有连接带。
8.作为优选,还包括有下撑机构,下撑机构包括有连接杆、下滑连接块、支撑柱、第一弹簧、第三固定轮块、空心t形管和支撑底板,左右两侧第一固定轮块中部之间均连接有下滑连接块,左右两侧下滑连接块底部之间连接有支撑底板,支撑底板上部安装有第三固定轮块,第三固定轮块中部滑动设有空心t形管,空心t形管下部前后两侧均贯穿设有连接杆,连接杆左右两端连接在下滑连接块上,连接杆前后两侧均设有支撑柱,下滑连接块上套接有第一弹簧,第一弹簧两端分别连接在连接杆下端和下滑连接块下部。
9.作为优选,还包括有锁定机构,锁定机构包括有下压旋转块、锁定杆和第二弹簧,空心t形管上部内壁滑动设有锁定杆,锁定杆顶部设有下压旋转块,锁定杆顶部套装有第二弹簧,第二弹簧两端分别连接在下压旋转块底部和空心t形管顶部。
10.作为优选,还包括有靠背机构,靠背机构包括有第三连接固定杆、第一滑动板、第三弹簧、第二滑动板、扭力弹簧和靠背外壳,第一梯脚与第二梯脚顶部之间连接有靠背外壳,靠背外壳内壁左右两侧滑动式设有第一滑动板,第一滑动板外侧滑动式设有第三连接固定杆,第三连接固定杆上套装有第三弹簧,第三弹簧两端分别连接在第一滑动板上和靠背外壳上,第一滑动板顶部前侧转动式设有第二滑动板,第二滑动板与第一滑动板之间连接有扭力弹簧。
11.与现有技术相比,本发明具有以下优点:1、本发明通过设有便捷机构,便捷机构与旋转机构配合能根据需要快速更换位置;2、便捷机构与下撑机构配合,能够有效提高梯子的稳定性;3、下撑机构与锁定机构配合,能避免梯子出现位移,同时提高梯子的安全性;4、靠背机构与第一梯脚和第二梯脚配合,工人能在梯子上进行间歇休息。
附图说明
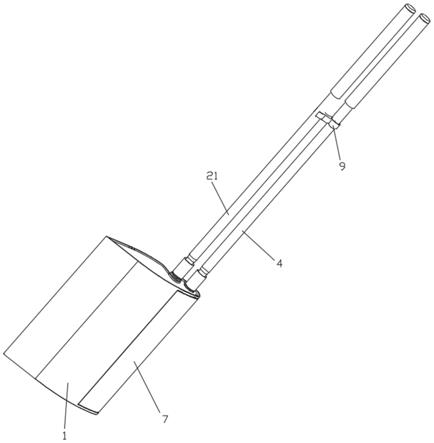
12.图1为本发明的立体结构示意图。
13.图2为本发明便捷机构的立体结构示意图。
14.图3为本发明旋转机构的立体结构示意图。
15.图4为本发明下撑机构的立体结构示意图。
16.图5为本发明下撑机构的局部立体结构示意图。
17.图6为本发明锁定机构的立体结构示意图。
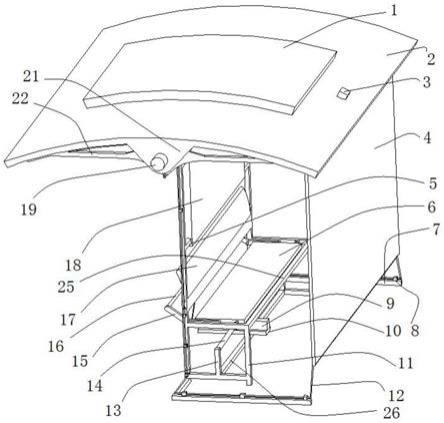
18.图7为本发明靠背机构的立体结构示意图。
19.以上附图中:1、第一梯脚,2、第二梯脚,3、第一连接固定杆,4、便捷机构,41、轮子,42、第一固定轮块,43、旋转杆,5、旋转机构,51、第二连接固定杆,52、旋转轮块,53、第二固定轮块,54、连接带,6、下撑机构,61、连接杆,62、下滑连接块,63、支撑柱,64、第一弹簧,65、第三固定轮块,66、空心t形管,67、支撑底板,7、锁定机构,71、下压旋转块,72、锁定杆,73、第二弹簧,8、靠背机构,81、第三连接固定杆,82、第一滑动板,83、第三弹簧,84、第二滑动板,85、扭力弹簧,86、靠背外壳。
具体实施方式
20.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
21.实施例1一种用于工地便捷行走的梯子,如图1所示,包括有第一梯脚1、第二梯脚2、第一连接固定杆3和便捷机构4,第一梯脚1左右两侧前端均间隔设有第一连接固定杆3,第一连接固定杆3数量为八根,位于同一侧的第一连接固定杆3前端连接有第二梯脚2,第一梯脚1和第二梯脚2左右两侧底部之间设有便捷机构4,第二梯脚2前侧设有旋转机构5。
22.当工人需要进行低空作业时,工人首先需要将第一梯脚1和第一连接固定杆3以及
第二梯脚2组装成梯子,随后工人可利用便捷机构4将梯子移动到需要的位置,工人将梯子移动到指定位置后,工人就可爬上梯子进行低空作业,当工人完成指定位置的作业时,工人可用手转动旋转机构5,旋转机构5会推动便捷机构4移动,这样工人就可以根据需要快速的更换位置进行低空作业,从而能够较大提升工人的工作效率。
23.实施例2在本发明一个较佳实施例中,如图2、图3、图4、图5、图6和图7所示,还包括有便捷机构4,便捷机构4包括有轮子41、第一固定轮块42和旋转杆43,第一梯脚1和第二梯脚2左右两侧底端均焊接有第一固定轮块42,第一固定轮块42数量为四个,位于同一侧的第一固定轮块42之间转动式设有旋转杆43,旋转杆43数量为两根,两根旋转杆43前后两侧均连接有轮子41,轮子41数量为八个。
24.当工人需要进行低空作业时,工人可推动第一梯脚1和第二梯脚2,第一梯脚1和第二梯脚2通过轮子41的转动可以根据需要快速的更换位置,轮子41转动会带动旋转杆43在第一固定轮块42上转动,当工人将第一梯脚1和第二梯脚2推动到指定位置后,工人只需要停止推动梯脚,工人便可爬上梯子进行低空作业,当工人还需要继续更换位置时,工人可重复上述动作,这样工人就可多次使用该梯子进行低空作业。
25.还包括有旋转机构5,旋转机构5包括有第二连接固定杆51、旋转轮块52、第二固定轮块53和连接带54,第二梯脚2上部前侧连接有第二连接固定杆51,第二连接固定杆51中部转动式设有旋转轮块52,两根旋转杆43前部均连接有第二固定轮块53,旋转杆43与旋转轮块52之间连接有连接带54。
26.工人手动移位的这个过程较繁琐,且会对工人的体力有一定的消耗,因此工人在梯子上进行低空作业时,可直接用手转动第二梯脚2前侧旋转轮块52,旋转轮块52在第二连接固定杆51上转动会带动连接带54转动,连接带54转动会带动旋转杆43转动,旋转杆43转动会带动前后两侧轮子41转动,第二固定轮块53能防止连接带54转动的过程出现移位,轮子41发生转动后,进而工人就完成了一次梯子位置的更换,当工人不需要继续移动梯子时,工人只需停止转动旋转轮块52即可,当工人还需要再次将梯子移动到指定位置时,工人再次重复上述操作即可。
27.还包括有下撑机构6,下撑机构6包括有连接杆61、下滑连接块62、支撑柱63、第一弹簧64、第三固定轮块65、空心t形管66和支撑底板67,左右两侧第一固定轮块42中部之间均连接有下滑连接块62,左右两侧下滑连接块62底部之间连接有支撑底板67,支撑底板67上部安装有第三固定轮块65,第三固定轮块65中部滑动设有空心t形管66,空心t形管66下部前后两侧均贯穿设有连接杆61,连接杆61左右两端连接在下滑连接块62上,连接杆61前后两侧均设有支撑柱63,下滑连接块62上套接有第一弹簧64,第一弹簧64两端分别连接在连接杆61下端和下滑连接块62下部。
28.工人在梯子上进行低空作业过程中,因为梯子下面安装有便于移动的轮子41,所以梯子难免会发生位移,从而导致安全性不够高,因此工人可在暂时不需要移动梯子时向下按压空心t形管66,空心t形管66在第三固定轮块65内向下滑动,支撑底板67能增加第三固定轮块65稳定性,进而会带动连接杆61向下滑动,连接杆61在下滑连接块62内向下滑动,进而带动支撑柱63也会随之向下滑动,第一弹簧64被压缩,当支撑柱63下滑至与轮子41接触配合时,支撑柱63会将轮子41固定,从而避免梯子发生移位,当工人需要再次移动梯子
时,工人可迅速松开空心t形管66,第一弹簧64复位作用,第一弹簧64会推动连接杆61向上滑动复位,连接杆61向上滑动会带动支撑柱63向上移动复位,连接杆61向上移动至原位时,随后空心t形管66会在第三固定轮块65内向上滑动复位,轮子41又可以继续转动,如此工人就可快速根据需要将梯子移动到指定位置,同时还增加了梯子的安全性和稳定性。
29.还包括有锁定机构7,锁定机构7包括有下压旋转块71、锁定杆72和第二弹簧73,空心t形管66上部内壁滑动设有锁定杆72,锁定杆72顶部设有下压旋转块71,锁定杆72顶部套装有第二弹簧73,第二弹簧73两端分别连接在下压旋转块71底部和空心t形管66顶部。
30.为了进一步增加梯子稳定时,工人可按压下压旋转块71,下压旋转块71向下移动会带动锁定杆72向下移动,第二弹簧73被压缩,当锁定杆72向下移动至与支撑底板67接触配合时,工人可旋转下压旋转块71,这时锁定杆72会暂时锁定在支撑底板67底部,空心t形管66会被锁定,从而达到持续将梯子锁定,当工人需要再次移动梯子时,工人可再次按压并旋转下压旋转块71,锁定杆72暂时不与支撑底板67底部呈锁定状态时,第二弹簧73复位作用,第二弹簧73会带动锁定杆72向上复位,锁定杆72向上复位会带动下压旋转块71向上复位,当工人需要再次锁定梯子时,重复上述操作即可。
31.还包括有靠背机构8,靠背机构8包括有第三连接固定杆81、第一滑动板82、第三弹簧83、第二滑动板84、扭力弹簧85和靠背外壳86,第一梯脚1与第二梯脚2顶部之间连接有靠背外壳86,靠背外壳86内壁左右两侧滑动式设有第一滑动板82,第一滑动板82外侧滑动式设有第三连接固定杆81,第三连接固定杆81上套装有第三弹簧83,第三弹簧83两端分别连接在第一滑动板82上和靠背外壳86上,第一滑动板82顶部前侧转动式设有第二滑动板84,第二滑动板84与第一滑动板82之间连接有扭力弹簧85。
32.工人的劳动强度一般较高,工人的背部长时间处于悬空状态会出现肌肉劳损,所以工人可手动向靠背外壳86外侧抽出第三连接固定杆81,第三连接固定杆81移动会带动第一滑动板82移动,第三弹簧83被拉伸,工人需要手动转动第一滑动板82,扭力弹簧85被拉伸,进而第二滑动板84会呈竖直状态,此时工人可椅靠在第二滑动板84上间歇休息,当工人背部暂时不与靠背外壳86接触时,扭力弹簧85复位作用,扭力弹簧85会带动第二滑动板84转动复位,进而带动第一滑动板82向靠背外壳86内侧复位,第三弹簧83复位作用,进而带动第三连接固定杆81向靠背外壳86内侧复位,此时工人能根据需要适应性的休息使工人有充足精力继续工作。
33.尽管已经仅相对于有限数量的实施方式描述了本公开,但是受益于本公开的本领域技术人员将理解,在不脱离本发明的范围的情况下,可以设计各种其他实施方式。因此,本发明的范围应仅由所附权利要求限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。