1.本实用新型属于建材生产机械设备技术领域,涉及一种全回转节能码垛机。
背景技术:
2.码垛机是将制品按一定排列方式码放在托盘、栈板等承载物上的机械设备,可进行自动堆码,堆码多层,然后推出,便于叉车运至仓库储存。
3.目前,建材生产领域广泛使用的码垛机为经纬码垛机,在实际应用中,经纬码垛机主要存在有以下不足:
①
采用动力直接作用于升降系统,能源消耗大,抓持力较小;
②
运行一个工作周期至少需要24秒,运行时间长,工作效率低;
③
在制品从砌块输送机转运到托盘输送机过程中,码垛机必须横跨砌块输送机和托盘输送机,造成自身机架结构复杂、体积庞大;
④
机械手部分不能自由更换,不能满足特殊砖型砌块制品的抓持转运;
⑤
采用开式液压控制系统,其码爪部分的工作过程不易平稳,不利于计算机系统的随动控制;
⑥
只能在线实现双板码垛,不能在线实现单板码垛,否则就要影响主机的生产率。
4.为了克服现有经纬码垛机的以上缺陷,一些企业尝试使用机器人来进行码垛作业,但机器人的抓持力较小,每次抓起物体的重量不能超过400kg,而且机器人的价格大都比较昂贵。
技术实现要素:
5.本实用新型的目的是提供一种全回转节能码垛机,解决了现有码垛机采用动力直接作用于升降系统,能源消耗大,抓持力较小,作业周期长的问题。
6.本实用新型所采用的技术方案是,一种全回转节能码垛机,包括旋转装置和升降装置,升降装置一侧设置有旋转机械手,升降装置与旋转机械手通过水平的旋转臂连接,升降装置包括链轮组、配重和升降电机,升降电机的输出轴上套设有链轮a,链轮组包括动链轮a、动链轮b和链条a,链条a依次缠绕在动链轮a、链轮a和动链轮b上,动链轮a安装在旋转臂顶面上,动链轮b安装在配重上,链条a的两个端部均固定在旋转装置上。
7.本实用新型的技术特征还在于,
8.其中,旋转装置包括回转支座和回转电机,回转支座上设置有可旋转任一角度的回转支撑,回转电机的输出轴上套设有驱动齿轮,回转支撑侧壁上设置有与驱动齿轮相啮合的齿纹。
9.回转支撑顶部安装有空心旋转体,空心旋转体顶部设置有空心吊臂,升降电机和链轮a均设置在空心吊臂内部,配重设置于空心旋转体内部,链条a一端固定在空心吊臂上。
10.链轮组还包括安装在空心吊臂上的定链轮,水平方向上,定链轮位于动链轮a与链轮a之间。
11.空心旋转体外侧套设有滑动箱,空心旋转体相对两侧侧壁上安装有竖直的直线导轨,滑动箱内壁上设置有与直线导轨相配合的滑块,旋转臂安装在滑动箱上。
12.靠近旋转臂的空心旋转体侧面上设置有止退齿条,靠近旋转臂的滑动箱侧壁顶部
安装有棘轮机构,空心旋转体顶部安装有固定轮,升降电机的输出轴上套设有支撑惰轮,棘轮机构连接有链条b,链条b依次通过固定轮和支撑惰轮连接配重。
13.棘轮机构包括棘轮和弹簧,棘轮上套设有与止退齿条相配合的棘爪,弹簧一端与棘爪连接,另一端与滑动箱连接,链条b与棘爪连接。
14.旋转机械手包括固定架和旋转电机,旋转电机的输出轴上套设有主动齿轮,固定架与旋转臂通过连接轴滑动连接,连接轴上套设有与主动齿轮相啮合的从动齿轮,固定架底面安装有成对的夹持码爪。
15.夹持码爪为液压夹持码爪,夹持码爪连接有液压缸,夹持码爪与固定架之间设置有法兰。
16.本实用新型的有益效果是,采用配重平衡部分升降系统重量,使提升动力大大减少,降低了能源消耗,还增加了码垛机的抓持力,夹持物体的重量可达到600kg;旋转装置可将制品水平旋转任一角度,便于将制品从输送位转移到叠垛的位置;本码垛机结构简单,体积小,可放置于砌块输送机和托盘输送机之间,运行一个工作周期仅需15秒左右,较传统经纬码垛机的运行时间大大减少。
附图说明
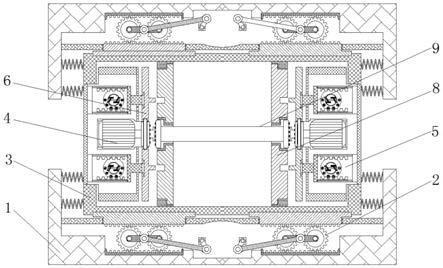
17.图1是本实用新型一种全回转节能码垛机的结构示意图;
18.图2是本实用新型一种全回转节能码垛机的俯视结构示意图;
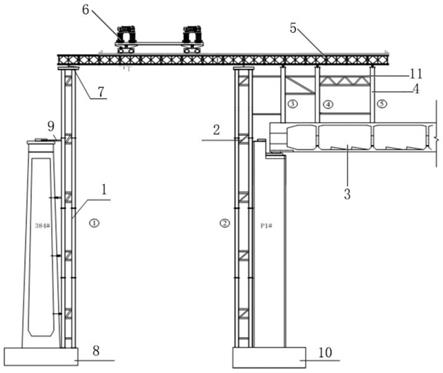
19.图3是本实用新型一种全回转节能码垛机的侧面结构示意图。
20.图中,1.旋转装置,2.升降装置,3.旋转机械手,4.旋转臂,5.配重,6.棘轮机构,7.链轮组,8.止退齿条,9.固定轮,10.链条b,11.空心旋转体,12.回转支撑,13.驱动齿轮,14.回转电机,15.回转支座,16.空心吊臂,21.直线导轨,22.滑动箱,23.滑块,24.升降电机,25.链轮a,61.棘轮,62.棘爪,63.弹簧,64.支撑惰轮,31.连接轴,32.固定架,33.夹持码爪,34.旋转电机,35.主动齿轮,36.从动齿轮,71.动链轮a,72.定链轮,73.链条a,74.动链轮b。
具体实施方式
21.下面结合附图和具体实施方式对本实用新型进行详细说明。
22.本实用新型一种全回转节能码垛机,参照图1和图2,包括旋转装置1和升降装置2,升降装置2一侧设置有旋转机械手3,升降装置2与旋转机械手3通过水平的旋转臂4连接,升降装置2可带动旋转机械手3上下移动,旋转装置1可带动升降装置2和旋转机械手3做0~360
°
范围任一角度的旋转,便于将制品从输送位转移到叠垛的位置。
23.旋转装置1包括回转支座15和回转电机14,回转支座15上设置有可水平旋转任一角度的回转支撑12,回转支座15和回转支撑12通过轴滑动连接。回转支撑12顶部安装有空心旋转体11,空心旋转体11顶部设置有空心吊臂16。
24.回转电机14的输出轴上套设有驱动齿轮13,回转支撑12侧壁上设置有与驱动齿轮13相啮合的齿纹。回转电机14带动驱动齿轮13旋转,进而带动回转支撑12、空心旋转体11和升降装置2一同旋转。
25.升降装置2包括链轮组7、配重5和升降电机24,升降电机24的输出轴上套设有链轮a25,链轮组7包括动链轮a71、定链轮72、动链轮b74和链条a73,定链轮72、升降电机24和链
轮a25均设置在空心吊臂16内部,水平方向上,定链轮72位于动链轮a71与链轮a25之间。动链轮a71安装在旋转臂4顶面上,动链轮b74安装在配重5上,配重5悬置于空心旋转体11内部,链条a73依次缠绕在动链轮a71、定链轮72、链轮25和动链轮b74上,链条a73的两个端部均固定在旋转装置1上,旋转装置1与动链轮a71、动链轮b74之间的链条、动链轮a71与定链轮72之间的链条,以及动链轮b74与链轮a25之间的链条均与水平面相垂直。
26.参照图3,空心旋转体11外侧套设有滑动箱22,空心旋转体11左右两侧侧壁上安装有竖直的直线导轨21,每侧安装有两个直线导轨,滑动箱22内壁上设置有与直线导轨21相配合的滑块23,旋转臂4安装在滑动箱22上,使旋转机械手3沿直线导轨上下移动,避免了旋转机械手3夹持的制品在上下移动过程中左右晃动,保证了制品在码垛过程中的稳定性。
27.靠近旋转臂4的空心旋转体11侧面上设置有止退齿条8,止退齿条8位于空心旋转体11左侧两个直线导轨之间。滑动箱22左侧顶部安装有棘轮机构6,空心旋转体11顶部安装有固定轮9,升降电机24的输出轴上套设有支撑惰轮64,棘轮机构6连接有链条b10,链条b10依次通过固定轮9和支撑惰轮64连接配重5。
28.棘轮机构6为安全防护装置,包括棘轮61和弹簧63,棘轮61上套设有与止退齿条8相配合的棘爪62,弹簧63一端与棘爪62连接,另一端与滑动箱22连接,链条b10与棘爪62连接,当升降装置2中链条73意外断裂时,配重5会因自身重力瞬间下降,同时带动链条b10右端端部下降,链条b10左端端部上升,拉动棘爪62上移,使棘爪62卡进止推齿条8的齿槽内,阻止旋转臂4下落,起到安全防护作用。
29.旋转机械手3包括固定架32和旋转电机34,旋转电机34的输出轴上套设有主动齿轮35,固定架32与旋转臂4通过连接轴31滑动连接,连接轴31上套设有与主动齿轮35相啮合的从动齿轮36,固定架32底面安装有成对的夹持码爪33,成对的夹持码爪33同步收拢,夹紧制品并通过旋转完成准确对位或部分制品的错茬垒叠。夹持码爪33为液压夹持码爪,夹持码爪33与固定架32之间设置有法兰,便于针对不同的制品,更换与制品相适应的夹持码爪33。夹持码爪33连接有液压缸,液压缸为两个方向码爪加紧制品提供动力,液压缸与夹持码爪33之间设置有闭式液压控制系统,通过调整闭式液压控制系统的压力和流量,使夹持码爪加紧物体的力量有手握紧物体的感觉,闭式液压控制系统工作时受地心引力较小,有利于计算机系统的随动控制,使夹持码爪的工作过程平稳。
30.使用本实用新型全回转节能码垛机时,旋转机械手3从输送机上收拢并夹紧制品,升降装置2将夹持的制品提升到所需高度,旋转装置1带动制品旋转到达叠垛上位时,旋转装置1工作停止,升降装置2带动制品下降,在所夹持制品和已叠好制品接触时,升降装置2工作停止,旋转机械手的夹持码爪松开,将制品叠放在已叠好的制品上。然后,升降装置2带动旋转机械手上升到高于已叠放制品的高度,旋转装置1带动旋转机械手旋转离开叠垛上位,升降装置2带动旋转机械手下降,停在输送机旁边,等待码垛下一个制品。本实用新型全回转节能码垛机的整个工作过程可全部采用plc自动控制,运行一个工作周期需15秒左右,较传统经纬码垛机的运行时间大大减少。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。