具有不粘涂层的电外科组织密封装置
1.本技术是申请日为2018年9月21日、申请号为201811103607.7、发明名称为“具有不粘涂层的电外科组织密封装置”的发明专利申请的分案申请。
技术领域
2.本公开涉及用于电外科组织密封器械的不粘涂层。更具体地讲,本公开涉及设置在电外科组织密封装置的相对的钳口构件的至少一部分上的受控厚度的聚合有机硅涂层,该厚度实现所需的电性能,同时提供组织粘连减少。
背景技术:
3.电外科钳利用机械夹持动作以及电能来对所夹持的组织起到止血作用。这些钳(开腹钳、腹腔镜钳或内窥镜钳)包括向所夹持的组织施加能量的密封板。通过控制经密封板向组织施加的能量的强度、频率和持续时间,外科医生可切割、凝固、烧灼和/或密封组织。
4.在过去,已经做出许多努力以在能量施加期间减少软组织与密封板的粘连。一般来讲,这些努力已设想了用于增加工具表面润滑性的不粘表面涂层,诸如聚四氟乙烯(ptfe,通常以商标出售)。然而,这些材料可妨碍止血的功效和效率。
技术实现要素:
5.本文所述的电外科器械包括具有不粘涂层的至少一个组织密封板,该不粘涂层被构造成在能量施加期间减少软组织与密封板的粘连。
6.根据本公开的实施方案,提供了电外科器械,该电外科器械包括具有导电组织密封板的至少一个钳口构件,该导电组织密封板被构造成可操作地联接到电外科能量源以便治疗组织;以及设置在组织密封板的至少一部分上的聚二甲基硅氧烷涂层,该聚二甲基硅氧烷涂层具有约35nm至约85nm的厚度。
7.在本公开的一个方面,聚二甲基硅氧烷涂层具有约60nm的厚度。在本公开的另一个方面,聚二甲基硅氧烷涂层具有基本上均匀的厚度。在本公开的另一个方面,聚二甲基硅氧烷涂层具有不均匀的厚度。在本公开的另一个方面,聚二甲基硅氧烷涂层是不连续的。在本公开的另一个方面,聚二甲基硅氧烷涂层是连续的。在本公开的另一个方面,电外科器械还包括设置在组织密封板的至少一部分上的绝缘层。在本公开的另一个方面,聚二甲基硅氧烷涂层设置在该对相对的钳口构件中的每一者的至少一部分上。在本公开的另一个方面,组织密封板由不锈钢形成。
8.根据本公开的另一个实施方案,提供了电外科器械,该电外科器械包括一对相对的钳口构件。相对的钳口构件中的每一者包括导电组织密封板,该导电组织密封板被构造成可操作地联接到电外科能量源以便治疗组织;支撑基部,该支撑基部被构造成支撑组织密封板;以及绝缘外壳,该绝缘外壳被构造成将组织密封板固定到支撑基部。厚度为约35nm至85nm的聚二甲基硅氧烷涂层设置在相对的钳口构件中的至少一者的至少一部分上。
9.在本公开的一个方面,聚二甲基硅氧烷涂层设置在组织密封板、支撑基部和绝缘外壳中的每一者的至少一部分上。在本公开的另一个方面,聚二甲基硅氧烷涂层具有约60nm的厚度。在本公开的另一个方面,聚二甲基硅氧烷涂层具有基本上均匀的厚度。在本公开的另一个方面,聚二甲基硅氧烷涂层具有不均匀的厚度。在本公开的另一个方面,聚二甲基硅氧烷涂层是不连续的。在本公开的另一个方面,聚二甲基硅氧烷涂层是连续的。
10.根据本公开的另一个实施方案,提供了导电组织密封板,该导电组织密封板包括具有第一表面和相对的第二表面的不锈钢层。不锈钢层被构造成向组织递送能量。绝缘层设置在不锈钢层的第二表面上,并且厚度为约35nm至约85nm的聚二甲基硅氧烷涂层设置在不锈钢层的第一表面的至少一部分上。
11.在本公开的一个方面,聚二甲基硅氧烷涂层具有约60nm的厚度。在本公开的另一个方面,聚二甲基硅氧烷涂层具有不均匀的厚度。在本公开的另一个方面,聚二甲基硅氧烷涂层是不连续的。
12.根据本公开的另一个实施方案,提供了在向组织施加能量期间抑制组织粘连到电外科组织密封装置的导电部件的方法。该方法包括使用等离子体增强化学气相沉积技术将聚二甲基硅氧烷涂层施加在电外科组织密封装置的导电部件的至少一部分上。该方法还包括将所施加的聚二甲基硅氧烷涂层的厚度控制到约35nm至约85nm。
13.根据本公开的另一个实施方案,提供了电外科器械,该电外科器械包括各自具有导电组织密封板的一对钳口构件,该导电组织密封板被构造成可操作地联接到电外科能量源。组织密封板被构造成基于至少一个所感测的组织参数来向组织递送电外科能量。电外科器械还包括设置在组织密封板中的每一者的至少一部分上的不粘涂层。不粘涂层具有一定厚度,该厚度受到控制以在向组织递送电外科能量期间减少组织与导电密封板的粘连,并且允许感测所述至少一个组织参数。
14.在本公开的一个方面,不粘涂层可由前体原料形成,该前体原料包括六甲基二硅氧烷、四甲基硅烷、六甲基二硅氮烷或它们的组合。在本公开的另一个方面,聚甲基二硅氧烷不粘涂层具有约35nm至约85nm的厚度。在本公开的另一个方面,不粘涂层具有约60nm的厚度。在本公开的另一个方面,所述至少一个组织参数选自温度和阻抗。
15.根据本公开的另一个实施方案,提供了在向组织施加能量期间抑制组织粘连到电外科组织密封装置的导电部件的方法。该方法包括使用等离子体增强化学气相沉积技术将不粘涂层施加在电外科组织密封装置的导电部件的至少一部分上,以及控制所施加的不粘涂层的厚度以在向组织施加能量期间抑制组织粘连到导电部件,并且允许感测经由向组织施加能量而生成的至少一个组织参数。
16.在本公开的一个方面,该方法还包括将不粘涂层的厚度控制到约35nm至约85nm。在本公开的另一个方面,不粘涂层包含六甲基二硅氧烷。在本公开的另一个方面,该方法还包括将不粘涂层的厚度控制到约60nm。
17.根据本公开的另一个实施方案,提供了电外科系统,该电外科系统包括电外科能量源和电外科器械,该电外科器械被构造成联接到电外科能量源。电外科器械包括一对相对的钳口构件和一对导电组织密封板,该对相对的钳口构件被构造成抓取组织,并且该对导电组织密封板分别联接到该对相对的钳口构件。该对密封板被构造成向组织递送电外科能量,并且电外科发生器被构造成感测经由密封板向组织递送电外科能量而生成的至少一
个组织参数。电外科器械还包括设置在组织密封板中的每一者的至少一部分上的不粘涂层。不粘涂层具有一定厚度,该厚度受到控制以减少组织与导电密封板的粘连,并且允许感测所述至少一个组织参数。
18.在本公开的一个方面,不粘涂层可由前体原料形成,该前体原料包括六甲基二硅氧烷、四甲基硅烷、六甲基二硅氮烷或它们的组合。在本公开的另一个方面,不粘涂层具有约35nm至约85nm的厚度。在本公开的另一个方面,不粘涂层具有约60nm的厚度。在本公开的另一个方面,所述至少一个组织参数选自温度和阻抗。
19.根据本公开的一个实施方案,公开了用于将涂层施加在电外科组织密封装置的导电部件的至少一部分上的方法。该方法包括:将导电部件放入等离子体沉积室中;将可电离介质供应到等离子体沉积室中;在第一功率电平下引燃可电离介质以生成第一等离子体,从而使导电部件准备好接收涂层;将可电离介质和前体组合物供应到等离子体沉积室中;以及在第二功率电平下引燃可电离介质和前体组合物以生成第二等离子体,从而在导电部件上形成涂层。
20.上述实施方案的具体实施可包括一个或多个以下特征,其中可电离介质是氧气并且前体组合物是六甲基二硅氧烷。该方法还可包括控制可电离介质与前体组合物之比、第二等离子体持续时间或第二功率电平中的至少一者以调节涂层的厚度。
21.根据本公开的另一个实施方案,公开了电外科系统。该系统包括:电外科器械,该电外科器械包括具有不粘涂层的至少一个导电部件以及存储与不粘涂层有关的数据的存储介质;电外科发生器,该电外科发生器被构造成向所述至少一个导电部件生成电外科能量,该电外科发生器包括:读取器,该读取器被构造成与存储介质对接并且读取该数据;以及控制器,该控制器联接到读取器并且被构造成基于该数据来调节电外科能量的至少一个参数。该方面的其他实施方案包括对应的计算机系统、设备以及记录在一个或多个计算机存储装置上的计算机程序,它们各自被构造成执行这些方法的动作。
22.上述实施方案的具体实施可包括一个或多个以下特征。电外科发生器还可包括存储用于控制电外科能量的算法的存储器。该算法参数可为治疗完成阈值。该数据可包括不粘涂层的厚度。所述技术的具体实施可包括硬件、方法或工艺、或计算机可访问介质上的计算机软件。
23.根据本公开的另一个实施方案,公开了用于对带涂层的电外科装置进行再处理的方法。该方法包括:通过以下方式移除涂层:将电外科装置的导电部件放入等离子体沉积室中;将第一可电离介质供应到等离子体沉积室中;以及在第一功率电平下引燃第一可电离介质以生成第一等离子体,从而从导电部件移除先前使用的涂层。该方法还包括通过以下方式重新施加新涂层:将第二可电离介质供应到等离子体沉积室中;在第二功率电平下引燃第二可电离介质以生成第二等离子体,从而使导电部件准备好接收新涂层;将第二可电离介质和前体组合物供应到等离子体沉积室中;以及在第三功率电平下引燃第二可电离介质和前体组合物以生成第三等离子体,从而在导电部件上形成新涂层。
24.根据上述实施方案的一个方面,第一可电离介质是四氟甲烷,第二可电离介质是氧气,并且前体组合物是六甲基二硅氧烷、四甲基硅烷、六甲基二硅氮烷或它们的组合。
附图说明
25.根据结合附图进行的下列详细描述,本发明电外科组织密封器械的上述和其他方面、特征和优点将变得更为显而易见,在附图中:
26.图1是根据本公开的一个方面的腹腔镜双极钳的透视图;
27.图2是根据本公开的一个方面的开腹双极钳的透视图;
28.图3a和图3b是根据本公开的一个方面的相对的钳口构件的分解图;
29.图4a是根据本公开的一个方面的密封板的前剖视图;
30.图4b是根据本公开的一个方面的钳口构件的前剖视图;
31.图5是根据本公开的一个方面的用于向钳口构件施加不粘涂层的方法的流程图;
32.图6是根据本公开的一个方面的用于从钳口构件移除不粘涂层的方法的流程图;
33.图7是根据本公开的一个方面的电外科系统的透视图;
34.图8是根据本公开的一个方面的图7的电外科系统的电外科发生器的前视图;
35.图9是根据本公开的一个方面的电外科发生器的示意图;以及
36.图10是根据本公开的一个方面的不带涂层和带涂层的钳口构件的粘连力图的曲线图。
具体实施方式
37.本文下面参照附图描述了本发明电外科组织密封器械的具体方面;然而,应当理解,所公开的方面仅仅是本公开的示例,并且可以各种形式体现。未详细描述众所周知的功能或构造,以免不必要的细节模糊本公开。因此,本文所公开的特定的结构和功能细节不应理解为限制性的,而仅仅是权力要求书的基础,并作为具有代表性的基础用于教导本领域技术人员以几乎任何合适的具体结构不同地运用本公开的概念。
38.相同的附图标记可指代各附图说明中类似或相同的元件。如附图中所示及以下整个说明中所述,按照惯例,当提及医疗器械上的相对定位时,术语“近侧”是指更靠近用户的设备端部,并且术语“远侧”是指离用户更远的设备端部。术语“临床医生”是指施行涉及使用本文所述方面的医疗手术的任何医学专业人员(即,医生、外科医生、护士等)。
39.如下面参照附图更详细描述,本公开涉及电外科器械,这些电外科器械具有设置在一个或多个部件(例如,组织密封板、钳口构件、电引线、绝缘体等)上的不粘涂层。小心地控制不粘涂层的厚度,从而实现所需的电性能,同时在组织密封期间提供组织粘连减少。
40.能够提供所需功能(即,减少组织粘连,与此同时保持足够的电传输以允许组织密封)的任何材料均可用作不粘涂层,前提条件是其具有充分的生物相容性。该材料可为多孔的以允许电传输。此类材料包括有机硅和有机硅树脂,它们可使用等离子体沉积工艺施加以精确控制厚度,并且可承受组织密封期间生成的热量。适用于不粘涂层的有机硅树脂包括但不限于聚二甲基硅氧烷、聚酯改性的甲基苯基聚硅氧烷(诸如聚甲基硅烷和聚甲基硅氧烷)以及羟基官能有机硅树脂。在一些实施方案中,不粘涂层由包含硅氧烷的组合物制成,该硅氧烷可包括六甲基二硅氧烷、四甲基硅烷、六甲基二硅氮烷或它们的组合。
41.在一些实施方案中,不粘涂层是由六甲基二硅氧烷(“hmdso”)的等离子体增强化学气相沉积(“pecvd”)形成的聚二甲基硅氧烷涂层。有利地,聚二甲基硅氧烷涂层用于减少组织与密封板和/或整个钳口构件的粘连。另外,聚二甲基硅氧烷涂层可用于减少密封板的
点蚀,并且可从总体上提供抵抗密封板和钳口构件的电和/或机械劣化的耐久性。
42.在一些实施方案中,电外科血管密封器械的相对的钳口构件(参见图1和图2)包括在其上直接沉积不粘涂层的导电组织密封板。可使用能够精确控制涂层的厚度的任何系统和工艺来完成不粘涂层的施加。在一些实施方案中,使用等离子体增强化学气相沉积(pecvd)或其他合适方法(诸如大气压等离子体增强化学气相沉积(ap
‑
pecvd))将hmdso沉积在密封板上。例如,可使用包括联接到功率源、液体和/或气体可电离介质(例如,氧气)源、泵和真空室的等离子体装置的系统和工艺来完成聚二甲基硅氧烷涂层的施加。一种此类示例性系统和工艺描述于共同拥有的美国专利申请公布no.us 2013/0116682中,该专利申请公布的全部内容以引用方式并入本文。功率源可包括用于向等离子体装置递送功率或提供匹配阻抗的任何合适的部件。更具体地讲,功率源可为任何射频发生器或其他合适的功率源,其能够产生电功率以引燃和维持可电离介质,从而生成等离子体流出物。
43.不粘涂层的厚度影响密封板的不粘性能,并且也可影响密封板的组织密封性能。例如,如果不粘涂层太厚,则密封板的组织密封性能可受到不利影响。更具体地讲,超过特定厚度(例如,大于约200nm)的不粘涂层可在密封板上形成均匀介电势垒或表面阻抗,这可不利地影响电外科发生器所采用的组织感测算法的有效性,该电外科发生器基于经由密封板向组织施加电外科能量而生成的所感测的组织参数(例如,阻抗、温度等)来控制电外科能量向血管密封器械的递送。如果所施加的不粘涂层太薄(例如,小于约20nm),则不粘涂层可能无法提供充分的组织粘连减少。
44.本公开的实施方案提供将不粘涂层以特定厚度或特定厚度范围设置在血管密封器械的部件(例如,密封板、钳口构件、电引线、绝缘体等)上,使得不粘涂层在组织密封期间提供充分的组织粘连减少,而不会不利地影响血管密封器械的组织密封性能。
45.在一些实施方案中,可将聚二甲基硅氧烷涂层以约20nm至约200nm的厚度施加到电外科装置的一部分,在实施方案中,该涂层可为约25nm至约120nm,并且在另外的实施方案中,为约35nm至约85nm。在特定实施方案中,不粘涂层可为约60nm厚。在一些实施方案中,不粘涂层的厚度可改变,使得不粘涂层具有基本上不均匀的厚度。例如,不粘涂层的第一部分可为约60nm厚,并且不粘涂层的任何一个或多个其他部分可具有除约60nm以外的厚度,但在约20nm至约200nm的范围内,在实施方案中,在约25nm至约120nm的范围内,并且在另外的实施方案中,为约35nm至约85nm。在其他实施方案中,不粘涂层具有基本上均匀的厚度。不希望受任何具体理论的束缚,据信上述范围内的聚二甲基硅氧烷涂层不能提供完全表面密封,并且正是在这些受控厚度下缺少表面上方的完全均匀密封,才允许某些电外科发生器的电算法恰当执行。采用组织感测算法的一种此类电外科发生器描述于美国专利no.9,603,752中,该专利的全部内容以引用方式并入本文。审阅本公开的本领域技术人员将易于设想到采用其他算法的其他电外科发生器。
46.在一些实施方案中,不粘涂层的厚度是密封板的厚度的约0.01%。
47.现在转到图1,一般被标识为钳10的器械用于各种外科手术,并且包括外壳20、手柄组件30、旋转组件80、触发器组件70以及端部执行器130,它们互相协作以抓取、密封和分开管状血管和脉管组织。钳10包括从外壳20的远侧端部延伸的轴12。轴12具有被构造成机械地接合端部执行器130的远侧端部16以及机械地接合外壳20的近侧端部14。
48.端部执行器130包括相对的钳口构件110和120,它们协作以有效抓取组织,从而实
现密封目的。钳口构件110和120两者围绕枢轴销(未示出)相对于彼此枢转。作为另外一种选择,钳10可包括能够相对于固定钳口构件120移动的钳口构件110,反之亦然。钳口构件110和120可为弯曲的,以有利于组织的操纵并且为进入目标组织提供更佳“视线”。传感器140可设置在钳口构件110和120中的至少一者之上或附近,以便感测经由钳口构件110和120向组织施加电外科能量而生成的组织参数(例如,温度、阻抗等)。传感器140可包括温度传感器、组织水合传感器、阻抗传感器、光学透明度传感器、钳口间隙传感器、应变和/或力传感器等。通过将钳10联接到电外科发生器(未示出)的电缆(未示出),可将所感测的组织参数作为数据传输到电外科发生器,该电外科发生器具有合适的数据处理部件(例如,微控制器、存储器、传感器电路等)以便基于从传感器140接收到的数据来控制电外科能量向钳10的递送。
49.钳的示例示于并描述于美国专利申请公布no.2013/0296922和美国专利no.9,655,673中,这些专利中的每一者的全部内容以引用方式并入本文。
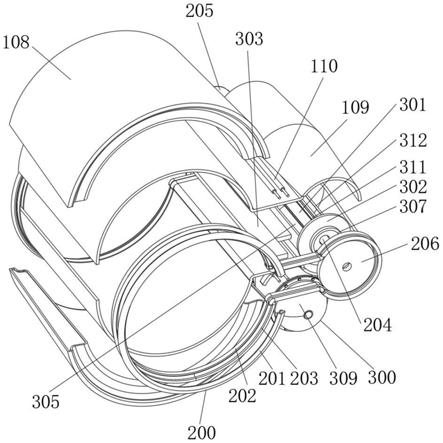
50.对于图2而言,示出了用于各种外科手术的开腹钳100。钳100包括一对相对的轴116和126,它们具有设置在轴116,126的远侧端部处的端部执行器200。端部执行器200包括一对相对的钳口构件210和220,它们围绕枢轴构件150连接并且可相对于彼此移动以抓取组织。每个轴116和126分别包括手柄118和128,以有利于轴116和126相对于彼此移动,从而使钳口构件210和220在打开位置与闭合位置之间枢转,在打开位置中,钳口构件210和220以相对于彼此间隔开的关系设置,并且在闭合位置中,钳口构件210和220协作以将组织抓取在其间。与图1所示的钳10类似,传感器240可设置在钳100的钳口构件210和220中的至少一者之上或附近,以便感测经由钳口构件210和220向组织施加电外科能量而生成的组织参数(例如,温度、阻抗等)。传感器240可包括温度传感器、组织水合传感器、阻抗传感器、光学透明度传感器等。通过将钳100联接到电外科发生器(未示出)的电缆(未示出),可将所感测的组织参数作为数据传输到电外科发生器,该电外科发生器具有合适的数据处理部件(例如,微控制器、存储器、传感器电路等)以便基于从传感器240接收到的数据来控制电外科能量向钳100的递送。
51.图3a和图3b分别示出了根据本公开的实施方案的钳口构件310和320的透视图。钳口构件310和320可与内窥镜钳10(图1)或开腹钳100(图2)一起利用,并且以与上文针对钳口构件110和120(图1)及钳口构件210和220(图2)所述类似的方式操作。钳口构件310和320中的每一者包括:分别的密封板312和322;分别的电引线325a和325b;以及分别从凸缘313和323朝远侧延伸的支撑基部319和329。
52.密封板312和322中的每一者分别包括下侧328a和328b,这些下侧可包括粘结到其上或以其他方式设置在其上的相应电绝缘层330a和330b。电绝缘层330a和330b用于使分别的密封板312和322与分别的支撑基部319和329电绝缘。此外,电绝缘层330a和330b用于分别防止或减慢密封板312和322(至少在其下侧328a,328b上)的腐蚀发生。在一个实施方案中,电绝缘层330a和330b可由聚酰亚胺形成。然而,在其他实施方案中,可利用任何合适的电绝缘材料,诸如聚碳酸酯、聚乙烯等。
53.另外,钳口构件310和320中的每一者分别包括外表面311a和311b,这些外表面包括设置在其上的不粘(例如,聚二甲基硅氧烷)涂层400。不粘涂层400可设置在钳口构件310和320任一者的选择性部分上,或可设置在整个外表面311a和311b上。在一些实施方案中,
不粘涂层400分别设置在密封板312和322的组织接合表面317a和317b上。不粘涂层400用于减少组织与密封板312和322、钳口构件310和320、电引线325a和325b、和/或周围绝缘材料的粘连。
54.支撑基部319和329被构造成在其上支撑密封板312和322。密封板312和322可通过任何合适的方法分别附连到支撑基部319和329的顶上,所述方法包括但不限于卡扣配合、包覆模制、冲压、超声焊接、激光焊接等。支撑基部319和329及密封板312和322分别通过包覆模制工艺由绝缘外壳316和326至少部分地封装,以将密封板312和322分别固定到支撑基部319和329。密封板312和322经由任何合适的方法(例如,超声焊接、压接、焊接等)分别联接到电引线325a和325b。电引线325a和325b分别用于向密封板312和322递送电外科能量(例如,来自电外科能量发生器)。更具体地讲,电引线325a将第一电势供应到密封板312,并且电引线325b将第二电势供应到相对的密封板322。
55.钳口构件320(和/或钳口构件310)还可包括设置在密封板322的组织接合表面311b上的一系列止挡构件390,以有利于组织的抓持和操纵,并且在组织的密封和切割期间限定钳口构件310和320之间的间隙。该系列止挡构件390可在制造期间设置(例如,形成、沉积、喷涂、附连、联接等)到密封板322上。一些或所有止挡构件390可涂布有不粘涂层400,或另选地,可设置在不粘涂层400的顶部上。
56.密封板312和322可分别包括被限定贯穿于其中且被构造成接收刀片(未示出)的纵向刀槽315a和315b,该刀片在刀槽315a和315b中往复运动以切割组织。分别设置在密封板312和322的相应下侧328a和328b上的电绝缘层330a和330b允许各种刀片构型,诸如,例如,t形刀片或i形刀片,这些刀片在刀槽315a,315b中往复运动期间可接触密封板的下侧(和/或绝缘层)。即,电绝缘层330a,330b用于分别保护刀片及密封板312和322的下侧328a和328b,使之免受损坏或磨损的影响。此外,在利用导电刀片(例如,用于电动组织切割)的情况下,电绝缘层330a,330b有助于使密封板312,322与导电刀片电绝缘。
57.现在转到图4a,示出了密封板312的前剖视图并将对其进行描述。密封板312具有不锈钢层317、不粘涂层400以及任选地设置在不锈钢层317的下侧328b上的电绝缘层330a。可将不粘涂层400施加到不锈钢层317的至少外表面311a。将电绝缘层330a粘结到不锈钢层317可通过任何合适的方法来完成,包括但不限于将粘合剂施加在电绝缘层330a与不锈钢层317之间,使用热处理将电绝缘层330a粘结到不锈钢层317,和/或它们的任何组合。任选的电绝缘层330a可具有约0.0005英寸至约0.01英寸范围内的厚度。
58.不粘涂层400可为不连续的或连续的。在一些实施方案中,不粘涂层400的不连续性或连续性可取决于不粘涂层400的厚度。在一些实施方案中,不粘涂层在整个密封板312上方可为连续的,从而气密密封该密封板312。在一些实施方案中,不粘涂层在整个密封板312上方可为不连续的。可使用合适的不连续涂布或片状涂布(patch
‑
coating)工艺将不连续的不粘涂层间歇地施加在密封板312上。不连续的不粘涂层的斑块性可允许不连续的不粘涂层的厚度相对于连续的不粘涂层有所增加,同时保持充分的不粘性能和组织密封性能。
59.在一些实施方案中,可通过以下方式形成密封板312:将电绝缘材料片材粘结到不锈钢片材,并且用不粘涂层涂布不锈钢片材。一旦这两种材料粘结在一起且不锈钢片材涂布有不粘层400,就可通过冲压、机加工或任何其他用于形成密封板的合适方法来形成密封
板312。
60.在一些实施方案中,可首先通过冲压、机加工或任何其他用于形成密封板的合适方法来形成密封板312。一旦形成密封板312,就将不粘层400施加到密封板312,之后再组装钳口构件310。一旦密封板312涂布有不粘层400,就可将密封板312附连到支撑基部319的顶上,经由绝缘外壳316固定到支撑基部319,并且联接到电引线325a(如上文针对图3a所述)以形成钳口构件310。任选地,一旦形成钳口构件310,就可将不粘涂层施加到钳口构件310的其他部件(例如,支撑基部319、绝缘外壳316、电引线325a等)。在一些实施方案中,可将不粘涂层施加到钳10(图1)或钳100(图2)的其他部件以减少与这些装置的操作相关联的摩擦粘连。例如,可将不粘涂层施加到钳10的轴12,施加到钳100的枢轴构件150及相对轴116和126,和/或施加到与钳10或钳100一起使用的刀(未示出)。
61.现在转到图4b,示出了钳口构件310的前剖视图并将对其进行描述。钳口构件310包括具有不锈钢层317和任选电绝缘层330a的密封板312。经由任何合适的工艺将密封板312附连到支撑基部319。另外,在密封板312固定到支撑基部319的情况下,经由任何合适的工艺将组合的密封板312和支撑基部319固定到绝缘外壳316。将不粘涂层400施加到组装好的密封板312、支撑基部319、绝缘外壳316和任选电引线325a(图3a)的外表面311a。在一些实施方案中,可能有用的是部分地涂布钳口构件310的外表面311a或者在钳口构件310的外表面311a的不同部分上包括不粘涂层400的较厚层。
62.除此之外或另选地,在一些实施方案中,密封板312可以以上文针对图4a所述的方式涂布有不粘涂层400,并且钳口构件310的外表面311a也可涂布有不粘涂层400。
63.一旦不粘涂层400设置在密封板312和322和/或钳口构件310上,就可将这些密封板和/或钳口构件与相对的钳口构件组装在一起(例如,可枢转地联接在一起)以形成端部执行器(例如,端部执行器130或端部执行器200)。在一些实施方案中,可在组装端部执行器之后,将不粘涂层400设置在密封板312和322和/或钳口构件310上。
64.在一些实施方案中,可将上述厚度或上述厚度范围内的聚二甲基硅氧烷涂层与一个或多个附加涂层组合。例如,可先将所述一个或多个涂层直接设置在密封板的不锈钢层上,再沉积聚二甲基硅氧烷涂层,使得聚二甲基硅氧烷涂层直接设置在所述一个或多个涂层上,而不直接设置在密封板的不锈钢层上。例如,美国公布no.2017/0119457描述了具有密封板的血管密封器械,该密封板具有设置在氮化铬(“crn”)涂层上方的hmdso基涂层。
65.参照图5,公开了示出用于形成不粘涂层400的方法的流程图。可以设想,可使用任何合适的化学气相沉积或等离子体真空系统来执行该方法,诸如美国专利no.8,187,484中所公开的系统、可购自德国维滕贝格的普发拓普公司(pva tepla ag,wettenberg,germany)的ion 140等离子体系统等。
66.将不带涂层的钳口构件(例如,钳口构件310)装载到等离子体系统的真空等离子体沉积室中。然后将该室抽空以在该室内形成真空。在建立真空之后,将可电离介质(诸如氧气)以任何合适的速率供应到该室中直到达到设定点压力。氧气流速可为约100标准立方厘米/分钟(sccm)至约1,000sccm,在实施方案中,流速可为约150sccm。设定点压力可为600毫托至约1,000毫托,在实施方案中,压力可为800毫托。一旦达到所需压力,就在第一时间段内以第一功率电平引燃氧等离子体以使表面准备好涂布。第一时间段可为约3分钟,并且第一功率电平可为300瓦特。基于氧气的等离子体移除残余有机杂质并弱结合来自钳口构
件的有机污染物。其还使表面准备好后续处理(例如,不粘涂层400的施加),改善表面覆盖度并且增强不粘涂层400的粘附性。
67.在完成基于氧气的等离子体施加之后,再次将该室抽空直到建立真空。将氧气和用于形成不粘涂层400的前体材料(诸如六甲基二硅氧烷、四甲基硅烷、六甲基二硅氮烷)以其相应流速供应到抽真空的室中,直到达到设定点压力。氧气流速可为约10sccm至约50sccm,在实施方案中,流速可为约15sccm。有机硅前体流速可为约10sccm至约50sccm,在实施方案中,流速可为约11sccm。设定点压力可为约100毫托至约500毫托,在实施方案中,设定点压力可为约200毫托。一旦达到所需压力,就在第二时间段内以第二功率电平引燃等离子体。第二时间段可为约1.5分钟,并且第二功率电平可为100瓦特。然后再次将该室抽空并排气。在该工艺的该阶段,形成不粘涂层400。具体地讲,当前体发生聚合时,聚二甲基硅氧烷形成不粘涂层400。可通过控制一个或多个以下参数来调节不粘涂层400的厚度,这些参数包括但不限于气体(例如,氧气与有机硅前体)之比、等离子体施加的持续时间以及使气体电离的功率。
68.参照图6,描述了用于移除不粘涂层400的工艺。可在对先前使用的医疗装置进行再调节的再处理设施处执行该工艺。在已使用钳10并且将钳口构件110和120覆盖在因电外科治疗而形成的焦痂和其他组织副产物中之后,可使用图6的工艺移除不粘涂层400并且如上文针对图5所述的那样施加新涂层。
69.再处理可涉及完全地或部分地拆卸钳10,并且具体地讲,从轴12上拆除钳口构件110和120。还可对钳10进行灭菌。可在拆卸之前或之后进行钳10的灭菌。一旦拆除钳口构件110和120,就将钳口构件110和120放入等离子体系统的室中以移除不粘涂层400。在一些实施方案中,还可利用如下文在图6中所述的移除工艺对钳口构件110和120进行灭菌。
70.参照图6,在将使用过的钳口构件装载到该室中之后,将该室抽空直到建立真空。将氧气和四氟甲烷以其相应流速供应到抽真空的室中,直到达到设定点压力。氧气流速可为约10sccm至约50sccm,在实施方案中,可为约25sccm。四氟甲烷流速可为约75sccm至约200sccm,在实施方案中,可为约125sccm。设定点压力可为约100毫托至约700毫托,在实施方案中,设定点压力可为约400毫托。一旦达到所需压力,就在多个时间段(例如,第一、第二、第三、第四时间段等)内以逐渐升高的功率电平引燃等离子体。最开始三个时间段可为大约相同的时间量,且最后一个时间段最长并以最高电平施加功率。第一时间段可为约15秒,并且第一功率电平可为150瓦特。第二时间段可为约15秒,并且第二功率电平可为300瓦特。第三时间段可为约15秒,并且第三功率电平可为450瓦特。第四时间段可为约3.25分钟,并且第四功率电平可为600瓦特。在该工艺之后,移除不粘涂层400。
71.一旦移除不粘涂层400,就将室抽空。在建立真空之后,将氧气以任何合适的速率供应到该室中直到达到设定点压力。气体流速可为约50sccm至约400sccm,在实施方案中,流速可为约150sccm。设定点压力可为200毫托至约6,000毫托,在实施方案中,压力可为400毫托。一旦达到所需压力,就在第五时间段内以第五功率电平引燃氧等离子体以完成第二层。第五时间段可为约1分钟,并且第五功率电平可为600瓦特。然后再次将该室抽空并排气。在施加氧等离子体之后,清洁钳口构件110和120并且可如上文针对图5所述的那样由再处理器再次施加不粘涂层400。具体地讲,钳口构件110和120一旦被涂布,就可接着与钳10的先前灭过菌的部件重新组装在一起。
72.图7是根据本公开的电外科系统610的一个示例性实施方案的部件的透视图。系统610可包括电外科发生器700,该电外科发生器被构造成联接到钳10(图1)、钳100(图2)或任何其他合适的电外科器械。钳10的钳口构件110或120之一充当有源电极,且另一个钳口构件是返回电极。通过发生器700经由连接到发生器700的有源端子730(图7)的电源线624将电外科交变rf电流供应到钳10的有源电极。经由发生器700的返回端子632(图7)处的返回线628使交变rf电流从返回电极返回到发生器700。电源线624和返回线628可封闭在电缆638中。
73.可经由设置在电缆638的端部处的插头(未示出)在具有通向有源端子730和返回端子732的连接(例如,引脚)的端口处将钳10联接到发生器700,其中插头包括来自电源线624和返回线628的触点,如下文更详细描述。
74.参照图8,示出了发生器700的正面740。发生器700可包括多个端口750
‑
762以容纳各种类型的电外科器械(例如,单极电外科器械、钳10、钳100等)。
75.发生器700包括用户界面741,该用户界面具有一个或多个显示屏742,744,746以便为用户提供多种输出信息(例如,强度设置、治疗完成指标等)。屏幕742,744,746中的每一者与对应端口750
‑
762相关联。发生器700包括合适的输入控件(例如,按钮、启动器、开关、触摸屏等)以便控制发生器700。屏幕742,744,746还被构造成触摸屏,这些触摸屏显示器械(例如,钳10)的对应菜单。于是用户通过简单地触摸对应菜单选项来调节输入。
76.屏幕642控制单极输出以及连接到端口750和752的装置。端口750被构造成联接到单极电外科器械,并且端口752被构造成联接到脚踏开关(未示出)。脚踏开关可用于提供附加输入(例如,发生器700的重复输入)。屏幕744控制单极和双极输出以及连接到端口756和758的装置。端口756被构造成联接到其他单极器械。端口758被构造成联接到双极器械(未示出)。
77.屏幕746控制可分别插到端口760和762之一中的钳10。发生器700通过端口760和762输出适用于对钳10所抓取的组织进行密封的能量。具体地讲,屏幕746输出用户界面,该用户界面允许用户为端口760和762中的每一者输入用户定义的强度设置。用户定义的设置可为允许用户调节一个或多个能源递送参数(诸如功率、电流、电压、能量等)或密封参数(诸如能量率限制器、密封持续时间等)的任何设置。用户定义的设置被传输到控制器724(图9),其中该设置可保存在存储器中。在实施方案中,强度设置可为数字标度,诸如例如,从一到十或从一到五。在实施方案中,强度设置可与发生器700的输出曲线相关联。强度设置对于每个所利用的钳10均可为特定的,使得各种器械为用户提供对应于钳10的特定强度标度。有源端子730和返回端子732(图9)可联接到所需端口750
‑
762中的任何一者。
78.继续参照图8,端口750
‑
762中的每一者可包括读取器,诸如光学读取器或射频询问器,其被构造成与钳10进行通信以提取与钳10有关的数据。可以在可设置在钳10或其任何部件(诸如电缆638)上的条形码、rfid标签、计算机可读存储器或任何其他数据存储介质640中编码此类数据。在实施方案中,该数据可包括钳10是包括带涂层的还是不带涂层的钳口构件110和120。在另外的实施方案中,该数据还可包括涂层的特性,诸如其厚度、介电特性、电流和电压极限、温度极限等。
79.图9示出了发生器700的示意框图,该发生器包括控制器724、电源727和功率转换器728。电源727可为连接到ac源(例如,线电压)的高电压dc电源,并且向功率转换器728提
供高电压dc功率,然后该功率转换器将高电压dc功率转换为rf能量并且将该能量递送到有源端子730。能量经由返回端子732返回至此。有源端子730和返回端子732通过隔离变压器729联接到功率转换器728。
80.功率转换器728被构造成以多种模式操作,在此期间发生器700输出具有特定占空比、峰值电压、波峰因数等的对应波形。可以设想,在其他实施方案中,发生器700可基于其他类型的合适电源拓扑结构。功率转换器728可为谐振rf放大器或非谐振rf放大器,如图所示。如本文所用,非谐振rf放大器表示缺少设置在功率转换器与负载“z”(例如,通过钳10联接的组织)之间的任何调谐部件(即,电感器、电容器等)的放大器。
81.控制器724包括可操作地连接到存储器(未示出)的处理器(未示出),该存储器可包括易失性、非易失性、磁、光学或电气介质中的一者或多者,诸如只读存储器(rom)、随机存取存储器(ram)、电可擦除可编程rom(eeprom)、非易失性ram(nvram)或闪存存储器。处理器可为适于执行本公开中所述的操作、计算和/或指令集的任何合适处理器(例如,控制电路),包括但不限于硬件处理器、现场可编程门阵列(fpga)、数字信号处理器(dsp)、中央处理单元(cpu)、微处理器以及它们的组合。本领域技术人员应当理解,处理器可由适于执行计算和/或执行本文所述指令集的任何逻辑控制电路替代。
82.控制器724包括可操作地连接到电源727和/或功率转换器728的输出端口,从而允许处理器根据开放和/或闭合控制环路方案来控制发生器700的输出。闭环控制方案是反馈控制环路,其中多个传感器测量多种组织和能量特性(例如,组织阻抗、组织温度、输出功率、电流和/或电压等),并且向控制器724提供反馈。然后控制器724控制电源727和/或功率转换器728,从而分别调节dc和/或电源。
83.根据本公开的发生器700还可包括多个传感器(未示出)。这些传感器可联接到电源727和/或功率转换器728,并且可被构造成分别感测供应到功率转换器728的dc电流和/或功率转换器728所输出的rf能量的特性。控制器724还从发生器700和/或钳10的输入控件接收输入信号。控制器724利用输入信号来调节发生器700所输出的功率和/或对其执行其他控制功能。
84.功率转换器728包括被布置成h桥拓扑结构的多个开关元件728a
‑
728d。在实施方案中,功率转换器728可根据包括但不限于半桥式、全桥式、推挽式等的任何合适拓扑结构来构造。合适的开关元件包括电压控制型装置,诸如晶体管、场效应晶体管(fet)、它们的组合等。在实施方案中,fet可由氮化镓、氮化铝、氮化硼、碳化硅或任何其他合适的宽带隙材料形成。在另外的实施方案中,fet可为任何合适的fet,诸如常规硅fet。
85.控制器724与电源727和功率转换器728两者进行通信。控制器724被构造成向开关元件728a
‑
728d输出控制信号(其可为脉宽调制(“pwm”)信号),如公布为美国专利申请公布no.2014/0254221的共同未决申请中更详细描述,该专利申请公布的全部内容以引用方式并入本文。具体地讲,控制器724被构造成调制向电源727供应的控制信号d1以及向功率转换器728的开关元件728a
‑
728d供应的控制信号d2。另外,控制器724被构造成计算发生器700的功率特征,并且至少部分地基于所测量的功率特征来控制发生器700。
86.控制器724被构造成执行血管密封算法,该血管密封算法控制发生器700的输出以治疗组织(例如,密封血管)。示例性算法公开于共同拥有的美国专利no.8,147,485和美国专利申请公布no.2016/0045248中,所有这些专利的全部公开内容以引用方式并入本文。
87.根据本公开的算法可体现为可由控制器724执行的软件指令。在实施方案中,算法可为基于阻抗的能量递送算法,其中由发生器700向组织递送能量直到达到预定阻抗阈值,或以其他方式基于所测量的组织阻抗来控制能量。考虑到不粘涂层400,钳10的存储介质640可包括如上所述与不粘涂层400有关的数据。在使用期间,控制器724可从存储介质提取与不粘涂层400有关的数据,并且基于从存储介质640提取的一种或多种涂层特性来调节血管密封算法。更具体地讲,控制器724可被构造成基于从存储介质640提取的涂层特性来调节血管密封算法的一个或多个参数。在实施方案中,该算法可包括控制器724用来确定血管密封是否完成的完成阈值(例如,阻抗、相位差等)。控制器724可被构造成基于与不粘涂层400有关的数据来调节完成阈值。在实施方案中,控制器724可被构造成基于存储在存储介质640中的涂层数据来调节能量递送算法的其他参数。这允许发生器700基于钳10的钳口构件110和120带涂层还是不带涂层来调整能量施加,这是由于不粘涂层400可影响钳10的介电特性和电特性。
88.上文所公开的所有数值和范围可改变一些量。无论何时公开具有下限和上限的数值范围,都明确公开了落入该范围内的任何数值和任何包括的范围。具体地讲,本文所公开的值的每个范围(其形式为“约a至约b”,或等价地“大约a至b”,或等价地“大约a
‑
b”)应理解为阐述涵盖在更宽的值范围内的每个数值和范围。除非含义明确相反,否则本文所阐述的所有范围应视为包括端点。除非明确说明或从上下文明显看出,否则如本文所用,术语“约”在结合所述数值或范围一起使用时表示略大于或略小于所述值或范围,偏差在所述值或范围的
±
10%范围内。
89.实施例
90.实施例1
91.本实施例将不带涂层的钳口构件与具有根据本公开的不粘涂层的钳口构件进行比较,该不粘涂层由hmdso的等离子体聚合形成。
92.本实施例中使用了可购自明尼苏达州明尼阿波利斯的美敦力公司(medtronic,minneapolis,mn)的ligasure
tm
lf4318 impact
tm
器械的四组钳口构件。其中三个钳口构件以50nm、100nm和150nm的三种不同厚度进行涂布。第四钳口构件保持不涂布。
93.在测试期间,将钳口构件连接到可购自明尼苏达州明尼阿波利斯的美敦力公司(medtronic,minneapolis,mn)的valleylab
tm
forcetriad
tm
电外科发生器。该发生器用于给钳口构件通电以对测试所用的组织进行密封。还建立了力测量站,其包括联接到驱动杆的电动机以便打开和闭合钳口构件。钳口构件还被封装在围绕钳口构件的介电组织夹钳中,这允许组织周围的附加夹持。驱动杆连接到双向测压元件,该双向测压元件连接到购自德克萨斯州奥斯汀的国家仪器公司(national instruments,austin,tx)的以便记录测压元件测量值。还用于控制电机以打开和闭合钳口构件。
94.猪子宫系膜用作测试组织。在测试期间,通过电机闭合钳口构件,并且激活发生器以对组织进行密封。在完成密封之后,将夹钳保持在适当位置,同时打开钳口构件。测压元件在钳口构件的打开期间测量力,并且将所观测到的最大力记录为粘连力。对四个钳口构件中的每一者测试约一百次。大约每二十次密封测量一次空白打开力(例如,没有密封的组织)以考虑不同钳口构件的可变打开力。该空白力值用作校准值并且从所
记录的粘连力中扣除以用于每个后续密封。
95.参照图10,该图示出了钳口构件中的每一者的粘连力图,所有三个带涂层的装置在整个测试过程中显示约0磅力的粘连力。这三个带涂层的钳口构件的粘连力没有可测量的差异。然而,不带涂层的装置在测试序列开始时显示约1磅力的粘连力,并且到100次密封结束时增加到6磅力。
96.虽然三个带涂层的钳口构件的平均粘连力没有可测量的差异,但在密封完成之后钳口有视觉差异。不带涂层的控制钳口构件具有钳口的外壳部分上的大量焦痂堆积以及密封板自身上的一些焦痂堆积。带50nm涂层的钳口构件具有塑料上的一些血液和一个斑点焦痂堆积。带100nm涂层的钳口构件具有极少血液和焦痂堆积,并且带150nm涂层的钳口构件几乎没有任何种类的堆积或焦痂。这表明虽然对于带涂层的钳口构件而言粘连力没有差异,但对于更高厚度的涂层而言可观测到堆积(例如,焦痂)减少。因此,当与不带涂层的钳口构件进行比较时,根据本公开的不粘涂层能有效防止组织粘连。
97.实施例2
98.本实施例将具有根据本公开的不粘涂层的钳口构件与其他血管密封器的钳口构件进行比较,该不粘涂层由hmdso的等离子体聚合形成。
99.对于本实施例而言,将ligasure
tm
impact
tm
器械的六个钳口构件连同可购自新泽西州桑莫维尔的爱惜康公司(ethicon inc.,somerville,nj)的enseal
tm
g2 super jaw器械以及可购自宾夕法尼亚州中心山谷的奥林巴斯公司(olympus,center valley,pa)的thunderbeat
tm
open extended jaw器械的钳口构件一起使用。其中三个ligasure
tm
impact
tm
钳口构件使用根据本公开的不粘涂层进行涂布,并且其余三个器械不进行涂布。不以任何方式修改enseal
tm
和thunderbeat
tm
中的每一者。
100.这些器械中的每一者与特定电外科发生器配对。将可得自美敦力公司(medtronic)的valleylab
tm
ft10、forcetriad
tm
和ls10连接到impact
tm
器械的带涂层和不带涂层的钳口构件之一,使得带涂层和不带涂层的impact
tm
器械中的每一者与不同发生器配对。另外,将enseal
tm
器械联接到爱惜康公司(ethicon)的g11发生器,并且将thunderbeat
tm
器械联接到奥林巴斯公司(olympus)的esg
‑
400(电外科)和usg
‑
400(超声)发生器,这是由于thunderbeat
tm
器械是双模态器械。
101.使用相同的力测量站和组织测试过程来测量共计十个组合的器械/发生器组合中的每一者的粘连力。使用组合中的每一者执行一百一十(110)个密封循环,即十次(10)密封进行十一(11)轮。每轮之间中断大约15
‑
35分钟。在密封循环中的每一者内测量和记录粘连力。
102.粘连评价涉及实验室技术人员在密封时进行的定性评估。一般来讲,如果组织未从钳口构件脱落,则钳口构件将被打开和闭合若干次以试图使组织脱离。在两个或三个打开/闭合序列之后,组织将被抓钳移除或被手动移除。如果组织从钳口构件移除,则其被视为不粘连的,并且如果组织在被拉离钳口构件时被拉伸,则其被视为粘连的。
103.就thunderbeat
tm
器械而言,由于其是超声装置(其中作为密封循环的一部分,钳口构件之间的组织被切割),因此粘连评价涉及确定组织是否粘连到顶部钳口(例如,无源钳口)的一部分。对于enseal
tm
器械而言,存在许多不同类型的粘连。最常见的情况是钳口构件被卡住并且在致动之后无法回弹打开。这需要人工干预以将钳口构件拉开或迫使钳口手柄
打开。还有很多时候虽然打开了钳口,但组织却粘连到底部钳口构件的一部分。对于所有三种发生器上的impact
tm
器械而言,观察到粘连的形式为组织粘附到钳口构件的一部分且不易脱落。不存在钳口构件在这些器械上无法打开的情况。
104.粘连结果的总结示于下表1中。表1包括在“是”一列下有粘连及在“否”一列下无粘连的密封数以及被归类为粘连的密封的百分比。在表1中,lf4418是指带涂层的impact
tm
器械,而lf4318是指不带涂层的impact
tm
器械,其中后缀表示所使用的发生器(表示forcetriad
tm
的ft、ft10或ls10)。
[0105][0106][0107]
统计分析的结果汇总于下表2中,除了说明该结果外,还说明了每个感兴趣的比较的p值。forcetriad
tm
发生器上测试的带涂层的impact
tm
器械以及thunderbeat
tm
器械具有统计学上更少的粘连(p=0.032),并且enseal
tm
以及在forcetriad
tm
上测试的不带涂层的impact
tm
器械均具有统计学上更多的粘连(两者均为p<0.001)。在ft10发生器上测试的带涂层的impact
tm
器械相较于thunderbeat
tm
器械在粘连率方面没有统计学差异(p=0.099)。enseal
tm
器械以及在ft10发生器上测试的不带涂层的impact
tm
器械均具有统计学上更多的粘连(p<0.001)。在ls10发生器上测试的impact
tm
器械、thunderbeat
tm
器械(p=0.005)、enseal
tm
器械(p<0.001)以及在ls10发生器上测试的不带涂层的impact
tm
器械(p<0.001)均具有统计学上更多的粘连。
[0108][0109]
将带涂层的impact
tm
器械上的粘连率与不带涂层的impact
tm
器械、enseal
tm
器械和tunderbeat
tm
器械进行比较。当与任何valleylab
tm
发生器上带涂层的impact
tm
器械进行比较时,enseal
tm
器械具有统计学上更多的粘连。将带涂层的impact
tm
器械与不带涂层的
impact
tm
器械(在其相应发生器组合上)进行比较,得出带涂层的impact
tm
器械总体具有统计学上更少的粘连。当与forcetriad
tm
和带涂层的impact
tm
器械组合进行比较时,thunderbeat
tm
具有统计学上更少的粘连。然而,当与ft10发生器进行比较时,粘连方面没有统计学差异,并且当与ls10发生器进行比较时,thunderbeat
tm
装置具有统计学上更多的粘连。因此,当与不带涂层的钳口构件和其他带涂层的器械进行比较时,根据本公开的不粘涂层能有效防止组织粘连。另外,不粘涂层的有效性也取决于所使用的发生器的类型。因此,发生器的电源和/或其控制算法也是一个因素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。