1.本技术涉及多触点焊接技术的领域,尤其是涉及一种便于定位的自动型多触点电焊机。
背景技术:
2.多触点电焊机采用双面双点过流焊接的远离,工作时两个电极加压工件使两层金属在两电极的压力下形成一定的接触电阻,而焊接电流从一电极流经另一电极时,在两接触电阻点形成瞬间的热熔接,进而对两层金属进行焊接,多触点电焊机常为自动型,多触点自动依次对待焊接的两个金属进行焊接,以防短路。
3.当使用自动型多触点电焊机在层板内焊接加强筋时,先移动层板与操作台抵接,然后将两个加强筋水平放在层板内,并将两个加强筋放在层板内所需焊接加强筋的位置,之后对层板的位置进行调整,将自动型多触点电焊机与待焊接位置对准,然后启动自动型多触点电焊机对加强筋和层板进行焊接。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:对层板待测位置的调整过程耗时长,精度低,导致层板焊接加强筋时的焊接效率低。
技术实现要素:
5.为了提高层板焊接加强筋时的焊接效率,本技术提供一种便于定位的自动型多触点电焊机。
6.本技术提供的一种便于定位的自动型多触点电焊机采用如下的技术方案:
7.一种便于定位的自动型多触点电焊机,包括机体和绝缘操作台,机体与绝缘操作台固定连接,机体与绝缘操作台之间设置有用于将层板和加强筋焊接的焊接装置,操作台设置有用于限制层板移动方向的限位装置和用于快速定位层板位置的定位装置。
8.通过采用上述技术方案,绝缘操作台使层板与绝缘操作台绝缘,实现了焊接装置对层板和加强筋的电极焊接,减小了出现绝缘操作台与层板之间的连电;在对层板内的加强筋进行焊接时,先利用限位装置对层板的移动方向进行限制,减小层板在移动时发生偏移的概率,之后利用定位装置对层板进行快速定位,使层板需要焊接加强筋的位置与焊接装置对齐,进而提高了层板焊接加强筋时的焊接精度,同时提高了加强筋的焊接速度,缩短了焊接时间,达到提高了层板焊接加强筋时焊接效率的目的。
9.可选的,所述限位装置包括调节槽和限位板,调节槽开设于绝缘操作台,限位板与调节槽滑动连接,限位板与调节槽之间设置有用于锁死限位板位置的第一锁死件。
10.通过采用上述技术方案,通过调节槽的设置,实现了限位板位置的可调节性,并利用第一锁死件将限位板的位置进行固定,提高了限位板与调节槽之间连接的稳定性,调节好限位板后对层板的移动方向进行限制,提高了限位装置的实用性。
11.可选的,所述限位板固定连接有滑块,滑块与调节槽滑动连接,滑块固定连接有限位块,调节槽侧壁开设有限位槽,限位槽与限位块滑动连接。
12.通过采用上述技术方案,在调节限位板位置时,移动限位板沿绝缘操作台滑动,限位板带动滑块沿调节槽滑动,滑块带动限位块沿限位槽滑动,滑块的设置实现了限位板与调节槽之间的滑动连接,限位块和限位槽的设置,提高了滑块与调节槽滑动连接的稳定性,减小滑块脱离调节槽的概率。
13.可选的,所述定位组件包括定位槽、活动块和定位杆,定位槽开设于绝缘操作台,活动块一端插入定位槽内,活动块与定位槽滑动连接,定位杆与活动块滑动连接,定位杆与活动块之间设置有用于驱动定位杆滑动收缩的驱动件。
14.通过采用上述技术方案,定位槽为活动块的移动进行导向,通过定位槽和活动块的设置,实现了定位杆位置的可调节性,提高了整个定位组件的实用性;在使用定位组件对层板的位置进行定位时,先通过移动活动块来带动定位杆到达所需位置,并利用驱动件将定位杆伸出,然后移动层板与定位杆抵接,此时层板所需焊接位置与焊接装置对齐,实现了定位杆对层板的快速定位,同时提高了层板的焊接精度。
15.可选的,所述驱动件为第一气缸,第一气缸与活动块固定连接,同时第一气缸与定位杆远离层板一端固定连接。
16.通过采用上述技术方案,启动第一气缸,第一气缸带动定位杆沿活动块滑动,使定位杆伸出进而对层板进行快速定位,在定位完成后,关闭第一气缸,第一气缸带动定位杆沿活动块缩回,以防对层板的移动进行阻挡,一气缸的设置,提高了驱动定位杆沿活动块滑动的便捷性。
17.可选的,所述活动块与定位槽之间设置有用于锁死活动块所在位置的第二锁死件。
18.通过采用上述技术方案,利用第二锁死件将活动块的位置进行固定,减小出现活动块出现偏移的情况,进一步提高了对层板定位的准确性。
19.可选的,所述机体设置有用于将摆正加强筋在层板内位置的摆正装置。
20.通过采用上述技术方案,在将加强筋摆放在层板内时,利用摆正装置辅助加强筋摆放在所需位置,使加强筋与层板所需焊接位置对齐,进而提高了加强筋与层板之间的焊接精度。
21.可选的,所述摆正装置包括第二气缸和摆正杆,第二气缸与机体固定连接,摆正杆一端与第二气缸固定连接,另一端与加强筋一侧抵接,摆正杆设置有多个。
22.通过采用上述技术方案,利用第二气缸来带动摆正杆进行移动,使摆正杆远离第二气缸一端插入层板内,然后移动加强筋,使加强筋与多个摆正杆均抵接,此时加强筋正处于所需焊接的位置,实现了对加强筋的快速摆放,进一步提高了加强筋与层板之间的焊接效率。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过限位装置和定位装置的设置,对层板的移动方向进行限制,减小层板在移动时发生偏移的概率,同时提高了层板焊接加强筋时的焊接精度,加快了加强筋的焊接速度,缩短了焊接时间,达到提高了层板焊接加强筋时焊接效率的目的;
25.2.通过定位槽、活动块和定位杆的设置,实现了定位杆对层板的快速定位,提高了层板的焊接精度;
26.3.通过第二锁死件的设置,对活动块的位置进行固定,减小出现活动块出现偏移
的情况,进一步提高了对层板定位的准确性。
附图说明
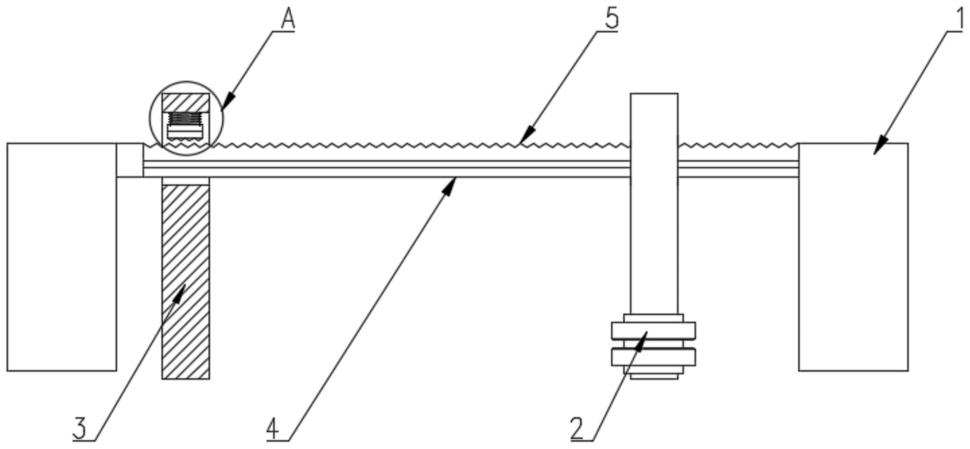
27.图1是本技术实施例中自动型多触点焊机的结构示意图;
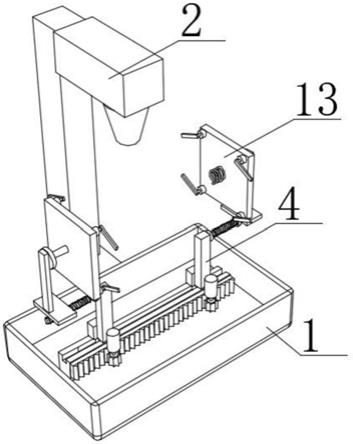
28.图2是本技术实施例中加焊加强筋的层板的结构示意图;
29.图3是本技术实施例中摆正装置和定位装置的结构示意图。
30.附图标记说明:1、机体;11、支撑柱;2、绝缘操作台;3、焊接装置;4、限位装置;41、调节槽;411、限位槽;42、限位板;43、第一锁死螺栓;44、滑块;441、限位块;5、定位装置;51、定位槽;52、活动块;53、第一气缸;54、定位杆;55、第二锁死螺栓;6、摆正装置;61、第二气缸;62、摆正杆;7、层板;8、加强筋。
具体实施方式
31.以下结合附图1
‑
3对本技术作进一步详细说明。
32.本技术实施例公开一种便于定位的自动型多触点电焊机。参照图1,一种便于定位的自动型多触点电焊机包括机体1和绝缘操作台2,机体1和绝缘操作台2均水平设置,机体1位于绝缘操作台2顶端,机体1与绝缘操作台2顶端之间设置有焊接装置3,层板7水平设置在绝缘操作台2顶端,绝缘操作台2顶端与层板7之间设置有限位装置4和定位装置5,层板7内设置有加强筋8,加强筋8与机体1之间设置有摆正装置6。在利用自动型多触点电焊机对层板7焊接加强筋8时,利用限位组件对层板7的移动方向进行限制,再利用定位装置5将层板7位置固定,使层板7所需焊接位置与焊接装置3对齐,之后利用摆正装置6将加强件摆放在层板7内的正确位置处,调节完成后,启动焊接装置3对层板7和加强筋8进行焊接,将加强筋8焊接在层板7内所需位置处。
33.参照图1,机体1与地面之间设置有支撑柱11,支撑柱11位于绝缘操作台2远离定位装置5的一侧,支撑柱11竖直设置,支撑柱11底端与地面固定连接,支撑柱11靠近绝缘操作台2一侧与机体1侧壁固定连接。支撑柱11对机体1提供支撑,将机体1悬设在绝缘操作台2顶端。
34.参照图1,绝缘操作台2沿垂直于机体1方向设置,绝缘操作台2的长度方向与层板7的移动方向相同,绝缘操作台2采用绝缘材料制成。在绝缘操作台2顶端对层板7进行焊接工作,绝缘性能的设置,减少出现绝缘操作台2与焊接装置3之间出现连电的情况,保证了焊接工作的正常进行。
35.参照图2,层板7为顶端开口结构,加强筋8水平设置在层板7内,加强筋8设置有两个,加强筋8底端与层板7底壁抵接,加强筋8垂直于层板7的移动方向,加强筋8两端分别与层板7的两个内侧壁抵接。将两个加强筋8均与层板7底壁焊接,利用加强筋8来加强层板7内部的强度。
36.参照图3,摆正装置6包括第二气缸61和摆正杆62,第二气缸61和摆正杆62均竖直设置有多个,第二气缸61顶端侧壁与机体1靠近定位装置5一侧固定连接,摆正杆62顶端与第二气缸61底端固定连接,摆正杆62工作时,摆正杆62底端插入层板7内,摆正杆62底端与层板7底壁之间留有缝隙,摆正杆62底端远离定位装置5一侧与加强筋8抵接。
37.在利用摆正装置6辅助加强筋8的摆放时,先将层板7放在绝缘操作台2的所需位置
处,使层板7所需焊接加强筋8的位置与焊接装置3对齐,然后启动第二气缸61,第二气缸61推动摆正杆62插入层板7内,此时摆正杆62底端靠近层板7底壁,然后移动加强筋8放入层板7内,移动加强筋8与多个摆整杆远离定位装置5一侧均抵接,此时加强筋8正位于所需焊接位置,实现了对加强筋8的快速摆放,同时提高了加强筋8所在焊接位置的精准度。
38.参照图1,限位装置4包括调节槽41、限位板42、第一锁死螺栓43和滑块44,调节槽41竖直开设在绝缘操作台2顶端,调节槽41平行于绝缘操作台2的宽度方向,调节槽41设置有两个,限位板42水平设置在绝缘操作台2顶端,限位板42沿绝缘操作台2的长度方向设置,限位板42底端与滑块44一端固定连接,滑块44远离限位板42一端插入调节槽41内,滑块44与调节槽41滑动连接,第一锁死螺栓43一端依次穿过限位板42和滑块44后与调节槽41底壁抵接,第一锁死螺栓43与限位板42和滑块44螺纹连接。
39.根据层板7的宽度对限位板42的位置进行调节,在调节限位板42的位置时,移动限位板42沿绝缘操作台2顶端滑动,限位板42带动滑块44沿调节槽41滑动,直到限位板42移动到所需位置处,然后旋转第一锁死螺栓43,使第一锁死螺栓43一端依次穿过限位板42和滑块44后与调节槽41底壁抵接,进而将限位板42的位置固定,然后移动层板7与限位板42远离支撑柱11一侧抵接,在对层板7进行焊接时,移动层板7沿限位板42滑动,限位板42对层板7进行导向,以减小限位板42移动过程中出现偏差的概率。
40.参照图1,滑块44水平设置在调节槽41内,滑块44沿绝缘操作台2的宽度方向与限位板42同宽,滑块44两侧壁均固定连接有限位块441,与限位块441配合使用的有限位槽411,限位槽411开设在调节槽41两个侧壁,限位槽411与限位块441滑动连接。在限位板42移动时,限位板42带动滑块44沿调节槽41滑动,滑块44带动限位块441沿限位槽411滑动,限位块441与限位槽411的设置,对滑块44在调节槽41的滑动进行限制,减小滑块44脱离调节槽41的概率。
41.参照图1和图3,定位装置5设置有两组,两组定位装置5分别对应两个加强筋8的焊接位置,定位装置5包括定位槽51、活动块52、第一气缸53、定位杆54和第二锁死螺栓55,定位槽51水平开设在绝缘操作台2顶端,定位槽51沿绝缘操作台2的长度方向设置,两个定位槽51连通且处于同一条直线,活动块52竖直设置,活动块52底端插入定位槽51内,活动块52与定位槽51滑动连接,第一气缸53与活动块52远离限位板42一侧固定连接,定位杆54一端穿过活动块52后与第一气缸53固定连接,另一端侧壁在工作时与层板7抵接,第二锁死螺栓55一端穿过活动块52后与定位槽51底壁抵接,第二锁死螺栓55与活动块52螺纹连接。
42.在利用定位装置5对层板7的焊接位置进行定位时,先根据层板7所需焊接两个加强筋8的位置对两个定位装置5的位置进行调节,移动活动块52,使活动块52沿调节槽41滑动,直到活动块52滑动到所需定位层板7的位置处,然后旋转第二锁死螺栓55,使第二锁死螺栓55一端穿过活动块52后与调节槽41底壁抵接,进而将活动块52的位置固定,然后启动第一气缸53,第一气缸53推动定位杆54沿活动块52滑动,第一定位杆54伸出活动块52,对另一组定位装置5重复上述步骤。
43.在两组定位装置5调节完成后,移动层板7沿绝缘操作台2滑动,直到层板7与靠近机体1的定位杆54抵接,此时层板7第一个所需焊接加强筋8的位置与焊接装置3对齐,并利用焊接装置3对加强筋8进行焊接,然后关闭与靠近机体1的定位杆54连接的第二气缸61,第二气缸61带动靠近机体1的定位杆54远离层板7,解除对层板7的定位,然后继续移动层板7
沿绝缘操作台2滑动,直到层板7与远离机体1的定位杆54抵接,此时层板7第二个所需焊接加强筋8的位置与焊接装置3对齐,并利用焊接装置3对加强筋8进行焊接,焊接完成后,利用第二气缸61将定位杆54远离层板7,然后将层板7移出绝缘操作台2。
44.整个过程实现了对层板7焊接位置的快速定位,同时提高了层板7焊接加强筋8时的焊接精度,加快了加强筋8的焊接速度,缩短了焊接时间,达到提高了层板7焊接加强筋8时焊接效率的目的。
45.本技术实施例一种便于定位的自动型多触点电焊机的实施原理为:在使用自动型多触点电焊机对层板7焊接加强筋8时,首先根据层板7的尺寸来对限位板42的位置进行调节,随即根据层板7所需焊接的位置对两个活动块52的位置进行调节,调节完成后,移动层板7与限位板42抵接,并继续沿绝缘操作台2的长度方向滑动,利用定位装置5对层板7的位置定位,然后利用摆正装置6将加强筋8摆放在层板7内所需焊接位置处,然后启动焊接装置3对加强筋8进行焊接,焊接完成后对另一个加强筋8重复上述定位及之后的步骤,直到焊接工作完成。
46.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。