1.本发明属于光学技术领域,尤其涉及一种衍射光学元件、投射模组及电子设备。
背景技术:
2.基于飞行时间(time of flight,tof)技术常用于深度检测或者三维检测中,通过测量发射光信号经被测物体反射回来到达接收端的飞行时间,计算被测物体的距离。衍射光学元件(diffractive optical elements,doe)是用于深度检测或者三维检测光的投射模组中的核心元件,当前常见的衍射光学元件的衍射效率与检测精度都不高。为此,需要具有较高衍射效率与检测精度的衍射光学元件。
技术实现要素:
3.本发明的目的是提供一种衍射光学元件,能够将单束光分束为3*4的多束光,具有较高的光学性能与较高的检测精度。
4.为实现本发明的目的,本发明提供了如下的技术方案:
5.一种衍射光学元件,用于将单束光分束为3*4的多束光,所述衍射光学元件包括阵列分布的多个微结构;所述微结构包括柄部、第一腿部和第二腿部,所述第一腿部和所述第二腿部间隔设置,并共同与所述柄部的一端部连接,所述第一腿部和所述第二腿部围合形成一缺口,所述缺口的开口方向背向所述柄部。
6.上述衍射光学元件,设置大致呈扳手状的微结构,微结构于基底上呈阵列排布形成分束阵列,从而使得衍射光学元件能够将单束光分束为3*4的多束光,实现散斑结构光或dtof(direct time of flight,直接测量飞行时间)电子设备中所需的点阵投射。并且,采用上述微结构,衍射光学元件分束形成的3*4的多束光的均匀度、零级强度及衍射效率等参数良好,即衍射光学元件具备良好的光学性能,应用于三维检测技术中能够满足高检测精度的需求。
7.进一步地,所述柄部包括相背的第一侧边和第二侧边,所述第一腿部包括背向所述第二腿部的第三侧边,所述第二腿部包括背向所述第一腿部的第四侧边;所述第一侧边和所述第三侧边圆滑连接,所述第二侧边和所述第四侧边圆滑连接,所述第一侧边与所述第二侧边圆滑连接。
8.柄部的第一侧边与第一腿部背向第二腿部的第三侧边圆滑连接,柄部的第二侧边与第二腿部背向第一腿部的第四侧边圆滑连接,柄部的第一侧边与第二侧边圆滑连接,也即,第一侧边与第二侧边、第一侧边与第三侧边、第二侧边与第四侧边均为圆滑连接。如此,可以使得微结构的结构更匀称,得光束更好地在通过微结构之后进行衍射形成3*4光束,并降低衍射过程中损失的光线能量,提高衍射效率及衍射分束后得到的光束的均匀性。
9.进一步地,所述第一腿部还包括朝向所述第二腿部的第五侧边,所述第二腿部还包括朝向所述第一腿部的第六侧边;所述第五侧边靠近所述柄部的一端和所述第六侧边的靠近所述柄部的一端圆滑连接;所述第三侧边和所述第五侧边远离所述柄部的一端圆滑连
接,所述第四侧边和所述第六侧边远离所述柄部的一端圆滑连接。
10.第一腿部上朝向第二腿部的第五侧边与第二腿部上朝向第一腿部的第六侧边在靠近柄部的一端圆滑连接,且第一腿部的第三侧边与第五侧边在远离柄部的一端圆滑连接、第二腿部的第四侧边与第六侧边在远离柄部的一端圆滑连接,也即在第一腿部与第二腿部的第三侧边、第五侧边、第六侧边、第四侧边之间也圆滑连接。如此,与上述原理相同,可以使得微结构的结构更匀称,得光束更好地在通过微结构之后进行衍射形成3*4光束,并降低衍射过程中损失的光线能量,提高衍射效率及衍射分束后得到的光束的均匀性。
11.进一步地,所述第一侧边至所述第六侧边均为曲线延伸。
12.第一侧边至第六侧边,也即第一侧边、第二侧边、第三侧边、第四侧边、第五侧边、第六侧边均为曲线延伸,如此可以使得微结构更为平滑匀称,有利于光束进行衍射分束,降低衍射过程中损失的光线能量,提高衍射效率及衍射分束后得到的光束的均匀性。
13.进一步地,所述衍射光学元件还包括基底,所述基底上包括阵列分布的多个微单元,每个所述微单元内设置有一所述微结构。
14.基底用于承载微单元的布置,每个微结构设置于微单元内,从而实现多个微结构阵列排布在基底上,结构更为紧凑,且多个微结构相互之间共同作用,使得分束后的光束点阵能够相互补偿,避免形成的点阵凌乱且能量分散,提高衍射分束后得到的光束的均匀性。
15.进一步地,所述微单元满足以下条件:2.38um≤hp≤6.60um、2.48um≤vp≤5.94um,且0.68≤hp/vp≤2.25。其中,hp为所述微单元在长度方向上的尺寸,vp为所述微单元在宽度方向上的尺寸。
16.通过限制微单元的长与宽,从而间接限制微结构的尺寸,有利于提升衍射光学元件的光学性能,提升衍射效率与检测精度。
17.进一步地,所述微结构满足以下条件中的至少一者:0.85≤la/hp≤0.99、0.77≤lb/vp≤0.97、0.36≤lc/hp≤0.50、0.36≤ld/vp≤0.51、0.25≤le/vp≤0.37、0.36≤lf/vp≤0.52;其中,la为所述微结构在所述长度方向上的最大尺寸,lb为所述微结构在所述宽度方向上的最大尺寸,lc为所述缺口在所述长度方向上的最大尺寸,ld为所述缺口在所述宽度方向上的最大尺寸,le为所述柄部最窄处在所述宽度方向上的最大尺寸,所述微结构在所述第一方向上具有第一端点,所述缺口具有一顶点,lf为所述第一端点与所述顶点之间的连线在所述宽度方向上的最大尺寸。
18.通过上述关系式进一步限制微结构的柄部与第一腿部与第二腿部的形状,有利于提升衍射光学元件的光学性能,提升衍射效率与检测精度。
19.进一步地,所述衍射光学元件在所述长度方向上具有第一衍射角β1与第二衍射角β2,在所述宽度方向上具有第三衍射角α,α、β1、β2分别满足以下关系式:16.5
°
≤α≤28.5
°
;10
°
≤β1=β2≤20
°
。
20.通过调节衍射光学元件在长度方向与宽度方向的衍射角,有利于满足电子设备中投射角度的多样化需求,从而提升衍射光学元件的适用范围。
21.本发明还提供一种投射模组,包括光源及如上任一所述的衍射光学元件,所述衍射光学元件用于对所述光源发射的光线进行分束。
22.在投射模组中采用上述衍射光学元件,衍射光学元件具备良好的光学性能,因而投射模组应用于电子设备中能够满足高检测精度的需求。
23.本发明还提供一种电子设备,其特征在于,所述电子设备包括接收模组以及如上所述的投射模组,所述投射模组用于向被测物体投射光线,所述接收模组用于接收被待测物体反射的光线。
24.在电子设备中采用上述投射模组,衍射光学元件具备良好的光学性能,有利于提升电子设备的检测精度。
附图说明
25.为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.图1是一种实施方式的衍射光学元件的示意图;
27.图2是一种实施方式的衍射光学元件的剖面示意图;
28.图3是一种实施方式的微单元的示意图;
29.图4是一种实施方式的微单元的参数标记示意图
30.图5是一种实施方式的微结构的参数标记示意图;
31.图6是衍射光学元件分束形成3*4的多束光的示意图;
32.图7是衍射光学元件在长度方向h上的衍射角示意图;
33.图8是衍射光学元件在宽度方向v上的衍射角示意图;
34.图9是一些不同衍射角的实施例的微结构形状示意图;
35.图10是一种实施方式的电子设备的示意图。
具体实施方式
36.下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
37.在本技术中,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”、“中”、“竖直”、“水平”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本发明及其实施例,并非用于限定所指示的装置、元件或组成部分必须具有特定方位,或以特定方位进行构造和操作。
38.并且,上述部分术语除了可以用于表示方位或位置关系以外,还可能用于表示其他含义,例如术语“上”在某些情况下也可能用于表示某种依附关系或连接关系。对于本领域普通技术人员而言,可以根据具体情况理解这些术语在本发明中的具体含义。
39.此外,术语“安装”、“设置”、“设有”、“连接”、“相连”应做广义理解。例如,可以是固定连接,可拆卸连接,或整体式构造;可以是机械连接,或电连接;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、元件或组成部分之间内部的连通。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
40.此外,术语“第一”、“第二”等主要是用于区分不同的装置、元件或组成部分(具体
的种类和构造可能相同也可能不同),并非用于表明或暗示所指示装置、元件或组成部分的相对重要性和数量。除非另有说明,“多个”的含义为两个或两个以上。
41.下面将结合具体实施例和附图对本技术的技术方案作进一步的说明。
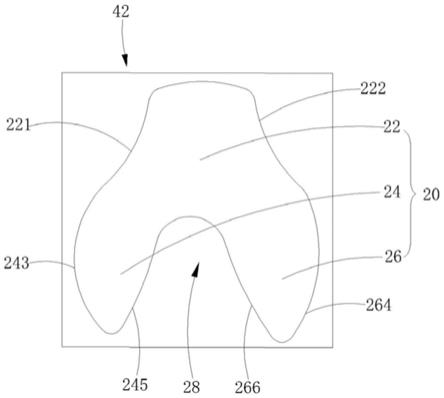
42.请参阅图1与图2,本发明提供一种衍射光学元件100,用于将单束光分束为3*4的多束光。衍射光学元件100包括基底40与阵列设置于基底40的一侧表面的多个微结构20。基底40上设置有阵列分布的多个微单元42,每个微单元42内设置有一微结构20,多个微结构20一一对应设置于多个微单元42内部。
43.基底40用于承载微单元42的布置,每个微结构20设置于微单元42内,从而实现多个微结构20阵列排布在基底40上,结构更为紧凑,且多个微结构20相互之间共同作用,使得分束后的光束点阵能够相互补偿,避免形成的点阵凌乱且能量分散,提高衍射分束后的光束的均匀性。
44.衍射光学元件100的生产工艺不限,包括但不限于为纳米光刻技术或纳米压印技术等,只要能够在基底40上形成由微结构20构成的分束阵列即可。在一些实施例中,可以先采用纳米光刻技术制造出与分束阵列相对应的模具。例如,分束阵列由多个基底40表面凸起的微结构20构成,则模具具有与分束阵列形状相对应的凹陷结构。在基底40上涂覆光刻胶,从而通过模具采用纳米压印技术将基底40上的光刻胶压印形成分束阵列。需要说明的是,分束阵列还可以由多个基底40表面凹陷的微结构20构成,则模具具有与分束阵列形状相对应的凸起结构。
45.当然,也可直接在基底40上采用纳米光刻技术制备分束阵列。然而,由于光刻模板面积通常远小于分束阵列的面积,若直接在基底40上采用纳米光刻技术制备分束阵列,则需要多次移动光刻模板方能满足大面积分束阵列的制造。而先制造模具,再通过模具压印制备分束阵列,仅需在模具制造过程中多次移动光刻模板,制得模具后便可通过模具快速量产分束阵列,有利于提升生产效率。
46.另外,在一些实施例中,为配合制造工艺,顺利生产分束阵列并避免损伤基底40,通过光刻胶制得分束阵列后,还可以在基底40与微结构20之间加上一层连接层30,连接层30用于使微结构20与基底40之间结合更为紧密,避免微结构20在基底40表面移动或者脱落,从而造成分束效果差,影响衍射光学元件100的光学性能以及精度。连接层30可以是oca(optically clear adhesive,光学胶),oca是一种用于胶结透明光学元件的特种粘胶剂,无色透明,光透过率在90%以上,且胶结强度良好。
47.在一些实施例中,基底40的厚度可以为0.1mm
‑
0.5mm,例如0.1mm、0.2mm、0.3mm、0.4mm、0.5mm等;连接层30的厚度可以为1um
‑
5um,例如1um、2um、3um、4um、5um等;微结构20的厚度可以为0.6um
‑
1.0um,例如0.6um、0.7um、0.8um、0.9um、1.0um等。
48.如此设置,有利于配合制造工艺顺利在基底40上形成分束阵列,也能够使得制得的衍射光学元件100具备足够的结构强度。基底40的材质不限,可以为任意适用的透光材质,包括但不限于为硅、二氧化硅、硼硅酸钠玻璃、蓝宝石等。
49.请参阅图1与图3,微结构20包括柄部22、第一腿部24和第二腿部26,第一腿部24和第二腿部26间隔设置,并共同与柄部22的一端部连接,第一腿部24和第二腿部26围合形成一缺口28,缺口28的开口方向背向柄部22。
50.通过将微结构20设置成大致呈扳手状,微结构20于基底40上呈阵列排布形成分束
阵列,从而使得衍射光学元件100能够将单束光分束为3*4的多束光,实现散斑结构光或dtof(direct time of flight,直接测量飞行时间)电子设备中所需的点阵投射。并且,采用上述微结构20,衍射光学元件100分束形成的3*4的多束光的均匀度、零级强度及衍射效率等参数良好,即衍射光学元件100具备良好的光学性能,应用于三维检测技术中能够满足高检测精度的需求。
51.柄部22包括相背的第一侧边221和第二侧边222,第一腿部24包括背向第二腿部26的第三侧边243,第二腿部26包括背向第一腿部24的第四侧边264,第一腿部24还包括朝向第二腿部26的第五侧边245,第二腿部264还包括朝向第一腿部24的第六侧边266。
52.在一些实施例中,第一侧边221和第三侧边243圆滑连接,第二侧边222和第四侧边264圆滑连接,第一侧边221与第二侧边222圆滑连接。
53.柄部22的第一侧边221与第一腿部24背向第二腿部26的第三侧边243圆滑连接,柄部22的第二侧边222与第二腿部26背向第一腿部24的第四侧边264圆滑连接,柄部22的第一侧边221与第二侧边222圆滑连接,也即,第一侧边221与第二侧边222、第一侧边221与第三侧边243、第二侧边222与第四侧边264均为圆滑连接。如此,可以使得微结构20的结构更匀称,使光束更好地在通过微结构20之后进行衍射形成3*4光束,并降低衍射过程中损失的光线能量,提高衍射效率。
54.在另一些实施例中,第五侧边245靠近柄部22的一端和第六侧边266的靠近柄部22的一端圆滑连接;第三侧边243和第五侧边245远离柄部22的一端圆滑连接,第四侧边264和第六侧边266远离柄部22的一端圆滑连接。
55.第一腿部21上朝向第二腿部26的第五侧边245与第二腿部26上朝向第一腿部24的第六侧边266在靠近柄部22的一端圆滑连接,且第一腿部24的第三侧边243与第五侧边245在远离柄部22的一端圆滑连接、第二腿部26的第四侧边264与第六侧边266在远离柄部的一端圆滑连接,也即在第一腿部24与第二腿部26的第三侧边243、第五侧边245、第六侧边266、第四侧边264之间也圆滑连接。如此,与上述原理相同,可以使得微结构20的结构更匀称,使得光束更好地在通过微结构20之后进行衍射形成3*4光束,并降低衍射过程中损失的光线能量,提高衍射效率。
56.可以理解的是,在一些其他的实施例中,第一侧边221、第二侧边222、第三侧边243、第四侧边264、第五侧边245、第六侧边266之间有连接的部位均可以是圆滑连接或者部分侧边之间相互圆滑连接,本发明不具体限制各侧边的具体连接方式。
57.在一些实施例中,第一侧边221、第二侧边222、第三侧边243、第四侧边264、第五侧边245、第六侧边266均为曲线延伸,即各侧边的轮廓线条都是平滑过渡的,如此可以使得微结构20更为平滑匀称,有利于光束进行衍射分束,降低衍射过程中损失的光线能量,提高衍射效率。
58.值得注意的是,本技术上述的“曲线延伸”、“圆滑连接”并不意味着绝对的几何意义上的“曲线”、“圆滑”,而是指其轮廓线条大致呈平滑的曲线形状与圆滑连接,其细微处可能存在缺口或者锯齿等微结构,但其整体呈平滑的曲线延伸或者圆滑连接。
59.请参阅图3与图4,在一些实施例中,微单元42满足以下条件:2.38um≤hp≤6.60um、2.48um≤vp≤5.94um,且0.68≤hp/vp≤2.25。其中,hp为微单元42在长度方向h上的尺寸,vp为微单元42在宽度方向v上的尺寸。
60.在一些实施例中,hp的取值可以是2.38um、2.50um、2.64um、2.78um、3.02um、3.34um、3.63um、3.86um、4.05um、4.24um、4.56um、4.83um、5.12um、5.35um、5.56um、5.82um、6.00um、6.24um、6.42u、6.60um等,优选2.64um~6.00um;vp的取值可以是2.48um、2.76um、3.12um、3.45um、3.84um、4.24um、4.68um、5.04um、5.40um、5.68um、5.94um等,优选为2.76um~5.40um;hp/vp的取值可以是0.68、0.82、0.98、1.18、1.34、1.60、1.82、2.04、2.25等,优选为0.82~2.04。可以理解的,上述实施例中所列举的取值数据不应理解为对于本发明的技术方案的限制,本发明的保护范围应以权利要求所要求保护的范围为准。
61.通过限制微单元42的长与宽的尺寸,从而间接限制微结构20的尺寸,有利于提升衍射光学元件100的光学性能,提升衍射效率与检测精度。
62.请继续参阅图3
‑
图5,在一些实施例中,微结构20满足以下条件中的至少一者:0.85≤la/hp≤0.99、0.77≤lb/vp≤0.97、0.36≤lc/hp≤0.50、0.36≤ld/vp≤0.51、0.25≤le/vp≤0.37、0.36≤lf/vp≤0.52。
63.其中,la为微结构20在长度方向h上的最大尺寸,即图4中a、b两点之间的连接在长度方向h的最大尺寸,a、b分别为微结构20在长度方向h上的两个端点;lb为微结构20在宽度方向v上的最大尺寸,即图4中c、d两点在宽度方向v上的最大尺寸,c、d分别为微结构20在宽度方向v上的两个端点;lc为缺口28在长度方向h上的最大尺寸,即图5中b、m两点之间的连线在长度方向h上的最大尺寸,b、m分别为缺口28在长度方向h上的两个端点;ld为缺口28在宽度方向v上的最大尺寸,即图5中b、e两点之间的连线在宽度方向v上的最大尺寸,b、e分别为缺口28在宽度方向v上的两个端点;le为柄部22最窄处在宽度方向v上的最大尺寸,即图5中f、g两点之间的连线在宽度方向c上的最大尺寸,f、g分别为柄部22最窄处在宽度方向v上的两个端点;lf为图5中c、m两点之间的连线在宽度方向v上的最大尺寸,c为微结构20在宽度方向v上的一个端点,m为缺口28在长度方向h上的一个端点,同时m还是缺口28的顶点。
64.在一些实施例中,la/hp的取值可以为0.85、0.87、0.89、0.91、0.93、0.95、0.97、0.99等。
65.在一些实施例中,lb/vp的取值可以为0.77、0.79、0.81、0.83、0.85、0.87、0.89、0.91、0.93、0.95、0.97等。
66.在一些实施例中,lc/hp的取值可以为0.36、0.38、0.40、0.42、0.44、0.46、0.48、0.50等。
67.在一些实施例中,ld/vp的取值可以为0.36、0.38、0.40、0.42、0.44、0.46、0.48、0.50、0.51等。
68.在一些实施例中,le/vp的取值可以为0.25、0.27、0.29、0.31、0.33、0.35、0.37等。
69.在一些实施例中,lf/vp的取值可以为0.36、0.38、0.40、0.42、0.44、0.46、0.48、0.50、0.52等。
70.可以理解的,上述实施例中所列举的各表达式的取值数据不应理解为对于技术方案的限制,本发明的保护范围应以权利要求所要求保护的范围为准。
71.通过上述关系式可以进一步限制微结构20的柄部22、第一腿部24与第二腿部26的形状,使得相邻的微结构20所形成的光斑能够更大程度地重合,从而能够对于远离中心的级次的光斑的能量进行补偿,比如在光束未经衍射光学元件100进行衍射时直射对应点为0级光斑,其能量由于衍射程度相对低,也即能量较为集中,而远离中心的0级光斑的能量会
相对更低,离中心越远的光斑的能量越低,从而表现出中心亮而周边较暗的现象。通过相邻的微结构20的不同能级的光斑相互补偿,比如0级光斑与2级光斑相互补偿,1级光斑与1级光斑相互补偿,从而使得光束通过衍射光学元件100后所形成的光斑点阵的各光斑的能量的能级是相近的,也即其亮度是相近的,从而使得通过衍射光学元件100所形成的图像更清晰,提升衍射光学元件100的光学性能,提高衍射效率与检测精度。
72.请参阅图6
‑
图8,一束光垂直于衍射光学元件100射入,经过衍射光学元件100上的微结构20的分束,被分束形成3*4的光束,并在物体表面形成3*4的光斑,如图6所示。图6中p点为初始光束未经衍射光学元件100进行衍射在物体表面所形成的对应点。从图6中可以看出,经过衍射光学元件100的微结构20的衍射作用,初始射入衍射光学元件100的光束被分束后分别在p点周围形成3*4的矩阵光斑。
73.可以理解的,光束经过衍射光学元件100后被分束形成3*4的矩阵光斑,由于衍射过程中能量会发生部分损耗,因而中心级次(靠近初始光束未经衍射在物体表面所形成的对应点,如图6中的p点)的光斑的能量会比周边级次(相对离初始光束未经衍射在物体表面所形成的对应点较远)的光斑的能量高,也即其亮度更高,例如,图7中的 1(或
‑
1)级次的光斑的亮度会相对于 2(或
‑
2)级次的光斑的亮度更高。微结构20呈阵列分布,可以使得相邻的微结构20对射入光束衍射所形成的分束光束的周边级次的光斑进行补偿,以使衍射光学元件100所形成的光斑能量更均匀,且衍射效率更高。同时单个微结构20所形成的3*4分束光照射在物体表面能够获取物体表面更多的检测信息,从而能够提高具有衍射光学元件100的电子设备的检测精度。
74.在一些实施例中,衍射光学元件100在长度方向h上具有第一衍射角β1与第二衍射角β2,在宽度方向v上具有第三衍射角α,α、β1、β2分别满足以下关系式:16.5
°
≤α≤28.5
°
;10
°
≤β1=β2≤20
°
。
75.在一些实施例中,α的取值可以为16.5
°
、18
°
、19.5
°
、21
°
、22.5
°
、24
°
、25.5
°
、27
°
、28.5
°
等。β1与β2的取值相等,可以为10
°
、12.5
°
、15
°
、17.5
°
、20
°
等。可以理解的,上述实施例中所列举的各衍射角的取值数据不应理解为对于本发明的技术方案的限制,本发明的保护范围应以权利要求所要求保护的范围为准。
76.值得注意的是,第二衍射角实际上应该是是β1 β2,即从0级光斑的位置到衍射光学元件100以及2级光斑位置所形成的夹角,本发明为便于描述β1与β2之间的关系,将β2描述为实际的第二衍射角相对于第一衍射角β1增加的角度,具体的请参阅图7。
77.结合图7与图8可以看出,在长度方向h上具有第一衍射角β1与第二衍射角β2,且β1=β2,也即在长度方向h上,衍射光学元件100可以覆盖的张角的角度为2(β1 β2)=4β1=4β2。在宽度方向上具有第三衍射角α,也即在宽度方向v上,衍射光学元件100可以覆盖的张角的角度为2α。也即,衍射光学元件100的视场角fov为2α*4β1。
78.通过调节衍射光学元件100在长度方向h与宽度方向v的衍射角,有利于满足电子设备中对于投射角度(即视场角fov)的多样化需求,从而提升衍射光学元件100的适用范围。
79.为更好地描述技术方案,本发明提供以下的实验数据,下述实验数据仅为本发明的部分优选实施例,不应理解为对于本发明技术方案的限制。
80.请参阅表1,本发明提供了t1
‑
t12共12个不同角度的第一衍射角β1、第二衍射角β
2、第三衍射角α的组合的实施例。其中,表中h指在h方向的第一衍射角β1与第二衍射角β2(β1与β2相等,故都用h表示),共选取了三组不同的角度,分别为10
°
、15
°
、20
°
;v表示在v方向的第三衍射角α,共选取了五组不同的角度,分别为16.5
°
、19.5
°
、22.5
°
、25.5
°
、28.5
°
。
81.表1
[0082][0083]
请参阅表2,各实施例中微结构20的尺寸特征由表2给出,表2中尺寸的数值单位均为nm,la
‑
vp分别为上述的各个尺寸。表2中微结构20的尺寸特征均满足上述各条件式。
[0084]
表2
[0085][0086][0087]
请参阅表3,表3为表2中t1
‑
t12实施例中一些参数的比值,表3中所有数据均进行了四舍五入并保留两位小数的处理。表3中微结构20的各尺寸之间的比值均满足上述各条件式。经过多次实验发现,各实施例中的衍射光学元件100具备良好的光学性能,且具有较高的衍射效率与检测精度。
[0088]
表3
[0089]
实施例lc/lalf/lbla/hplb/vplc/hplf/vple/vpld/vpt10.430.500.940.870.400.430.310.46t20.430.470.950.880.410.410.280.41t30.430.490.940.880.410.430.330.45t40.450.490.950.880.430.430.290.42t50.470.490.970.860.450.420.270.41
t60.440.460.960.890.420.410.270.43t70.440.470.960.880.420.410.270.43t80.430.480.950.870.410.420.310.45t90.440.470.950.880.420.410.300.40t100.450.490.950.870.430.420.310.44t110.430.460.950.870.410.400.300.41t120.430.490.940.870.410.420.310.44max0.470.500.970.890.450.430.330.46min0.430.460.940.860.400.400.270.40average0.440.480.950.870.420.420.300.43
[0090]
请参阅图9,图9中示出了t1
‑
t12的各实施例对应的微结构20的形状,各实施例的参数所得到的微结构20均具有较高的光学性能,具有较高的衍射效率与检测精度。
[0091]
当需要60
°
*45
°
的fov时,可以采用第七实施例t7,t7在长度方向h的第一衍射角β1与第二衍射角β2相等,都为15
°
,t7在宽度方向v的第三衍射角α为22.5
°
,即t7在长度方向h的张角为2(β1 β2)=4β1=60
°
,在宽度方向v的张角为2α=45
°
,也即可实现60
°
*45
°
。对应表2与表3中的参数可以相应制得所需的60
°
*45
°
的衍射光学元件100。其他实施例与t7类似,此处就不再一一赘述。
[0092]
通过调整微结构20的尺寸特征,能够调节衍射光学元件100的衍射角,从而满足不同场景或电子设备的投射需求。
[0093]
请参阅图10,本发明还示出了一些实施例中的投射模组210与电子设备200。在一些实施例中,衍射光学元件100与光源211组装形成投射模组210,并应用于电子设备200中,电子设备200还包括接收模组220。
[0094]
具体地,电子设备200可以采用散斑结构光或dtof等任意适用需借助点阵投射获取深度信息的技术。光源211能够发射红外或者近红外光束,例如光源211可以发射940nm
±
50nm的红外光束,由于红外光束或者近红外光束的波长相对可见光更长,而波长长的光束的衍射效果会更好,所以红外或者近红外光束的衍射效果相对更好,有利于提高衍射效率与检测精度。
[0095]
衍射光学元件100位于光源211的出光侧,衍射光学元件100能够将光源211出射的单光束分束为3*4的多光束,并投射到待测物体230上。投射模组210投射到待测物体230上的光束经待测物体230反射后被接收模组220接收。其中,接收模组220可配置有图像传感器。接收模组220能够根据投射模组210投射的光束信号以及经待测物体230反射的光束信号,获取待测物体230的深度信息,从而实现三维检测功能。
[0096]
可以理解的,通过衍射光学元件100后形成的光斑的能量越高,即亮度越高,成像越清晰,则在进行深度检测时检测设备接收到的反射光线能量越高,也即反射光线所能携带的深度信息更丰富,从而所能检测到的深度信息更准确,检测精度越高。
[0097]
在电子设备200中采用上述具有衍射光学元件100的投射模组210,衍射光学元件100能够将单光束分束为3*4的多束光并具备良好的光学性能,有利于提升电子设备200的检测精度。
[0098]
电子设备200可以是手机、平板电脑或者智能穿戴设备等,本发明对于电子设备
200的具体类型不做限制。
[0099]
以上所揭露的仅为本发明一种较佳实施方式而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施方式的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。