1.本发明涉及一种对含误差数据进行处理的方法,具体涉及一种对三轴磁传感器的旋转体误差补偿及实验方法。
背景技术:
2.现在的智能导航、飞行体的制导控制等项目越来越多利用地磁来实现姿态测量、获取旋转体姿态信息。地磁场属于弱磁场,磁传感器极易受到外部磁场的干扰,且磁传感器本身也存在着工艺、安装等误差。为了得到可靠的,高精度的导航信息,必须对磁传感器进行有效的误差标定与补偿。椭球拟合标定方法和最小二乘法因其简单、易实现的特点可在实际工程中应用。
技术实现要素:
3.本发明的目的在于提供一种对三轴磁传感器的旋转体误差补偿及实验方法,基于工程应用的角度,能够实现消除安装环境及制造工艺对磁传感器的干扰,降低测量误差。
4.实现本发明目的的技术方案为:一种对三轴磁传感器的旋转体误差补偿及实验方法,根据旋转体实际所处环境分析误差来源以及建立包含温度与环境影响的误差模型;采用椭球拟合对旋转体环境误差进行补偿;采用无磁转台以及平面旋转采点的方法对实际地磁传感器进行补偿验证。
5.进一步的,采用两个两轴的传感器正交放置来采集三轴地磁数据,磁传感器的误差主要来源自四个方面:旋转体环境误差、不正交误差、灵敏度误差、零漂误差。
6.进一步的,误差模型表现为:
[0007][0008]
[h
x
(t) h
y
(t) h
z
(t)]
t
是三轴地磁理论输出值,是有环境干扰下并受传感器自身影响的地磁输出值;旋转体系数矩阵,考虑了传感器的灵敏度误差与安装误差,g=[g
x0
,g
y0
,g
z0
]
t
为旋转体偏置矩阵,体现的是零位误差。
[0009]
进一步的,在考虑温度情况下的误差模型为:
是在温度t下的三轴地磁实际输出值,c和b矩阵分别是温度误差的温漂比例系数矩阵和传感器的温度零偏系数矩阵。
[0010]
进一步的,采用二次多项式拟合对温度影响进行补偿,采用基于最小二乘法的椭球拟合对旋转体环境和传感器自身误差进行补偿。
[0011]
进一步的,将三轴磁传感器的理论输出值由于制造误差的存在,原本构成的球面畸变成原点平移的椭球面。而地球磁场在短时间内可视为一个恒定磁场,因此地磁场强度h可视为一常量,从而有h
t
h=(h
′‑
g)
t
m(h
′‑
g),其中m=a
t
a,h
t
h为常数,a为旋转体系数矩阵,g是旋转体偏置矩阵,
[0012]
进一步的,采集数据时,将三脚架中心点对准初始设定的地磁测量原点,无磁转台水平放置在三脚架上,调整三脚架每个脚的伸缩程度保证旋转体支撑平面平行于水平面,三脚架和转动平台均由无磁材料制成。用四个滚珠轴承支撑旋转体,将装有三轴磁强计的组件安装在头部,外接数据线与采集设备连接。转台和旋转装置可以分别模拟组件的俯仰、偏航和滚转方向的角度变化。
[0013]
进一步的,采集地磁数据时,无磁转台在水平面内从磁北方向开始顺时针均匀转动8个45
°
度,在每个角度上分别顺、逆时针转动旋转体一分钟。验证标定方法时,上位机将计算得出的旋转体补偿系数发送给旋转体,旋转体经过嵌入式计算机解算后输出实时采集的补偿后的三轴地磁值,上位机进行采集后验证补偿后地磁值的正确性。
[0014]
与现有技术相比,本发明的有益效果为:本发明对三轴磁传感器在工程实际中产生的误差进行分析建模,采用椭球拟合方法对三轴磁传感器的输出误差进行补偿,并提出了一种标准的旋转体标定环境及方法,快速、有效的解决了在外界环境干扰与自身误差影响下地磁数据发散的问题,最大程度上保障了旋转体上地磁数据的准确性和可靠性。
附图说明
[0015]
图1为本发明的示意流程图。
[0016]
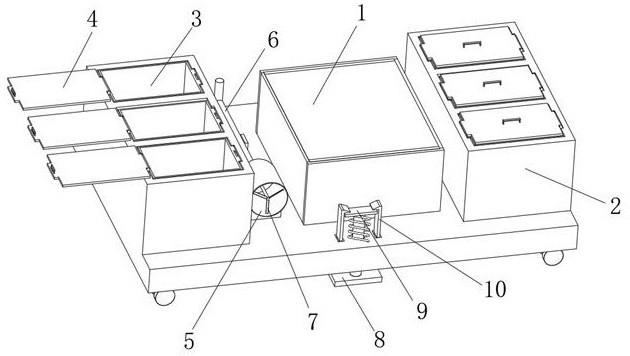
图2为本发明的旋转体标定环境示意图。
[0017]
图3为本发明三轴磁传感器实际输出地磁值三维图。
[0018]
图4为本发明预处理后三轴地磁值三维散点图。
[0019]
图5为本发明椭球拟合补偿方法流程图。
[0020]
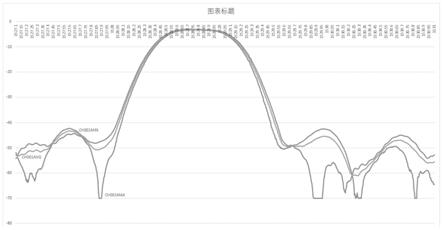
图6为本发明误差补偿后旋转体指北三轴地磁值。
[0021]
图7为本发明误差补偿后旋转体指东三轴地磁值。
[0022]
图8为本发明误差补偿后三轴地磁值三维散点图。
[0023]
图中:1、hmc1052磁强计,2、 5v稳压直流电源,3、stm32f7处理器,4、旋转体对外通信接口fgg.0b,5、moxa卡串口线。
具体实施方式
[0024]
本发明针对在工程应用中三轴磁传感器进行标定时操作不便、标定困难等问题,在考虑了温度对磁传感器影响的前提下,公开了一种简单有效的去除误差的标定方法。该方法分析了磁传感器的误差来源,建立了包含安装位置、载体环境等影响因素的误差模型,采用最小二乘法原理对磁传感器的输出进行了椭球拟合补偿以及补偿实验方式,有效的解决了环境磁场以及安装位置对传感器输出的影响,可以实现在磁环境干扰下对三轴磁传感器的旋转体误差标定。
[0025]
如图1所示,一种三轴磁传感器的旋转体误差补偿及实验方法,实现步骤包括:采集数据、数据预处理、平滑滤波、椭球拟合补偿、数据仿真验证。
[0026]
采集数据是将组件水平固定放置,保证在旋转体旋转和转动过程中磁传感器相对旋转体保持静止状态。旋转体平台在同一温度前提下,平稳水平转动一周360
°
,并对多个角度进行旋转体旋转采集地磁数据;
[0027]
数据预处理是将采集到的实际地磁值按不同角度进行分类,并进行去跳点处理;
[0028]
滤波是对各个角度的地磁数据进行平滑处理,根据椭球所需筛选出合理的数据;
[0029]
椭球拟合补偿模是对筛选过后的地磁值根据椭球公式进行拟合近似,利用最小二乘法原理计算出椭球系数与偏置系数,最终将计算得出的补偿系数保存记录到本地;
[0030]
数据仿真是根据椭球拟合补偿模块计算出的补偿系数与误差补偿模型,带入地磁传感器输出的原始值计算仿真,验证椭球补偿算法的正确性。
[0031]
进一步的,组件旋转体标定环境包括稳压直流电源、moxa串口线缆、某型号旋转体、无磁三脚架、无磁转台,如图2所示。旋转体标定方法是将包含三轴磁传感器的组件安装在旋转体头部,外接数据线与采集设备连接,转动无磁转台,在同一平面内采集不同角度下的椭球地磁值。
[0032]
进一步的,所述三轴磁传感器由两个两轴磁传感器正交放置构成;磁传感器型号为hmc1052。
[0033]
进一步的,滤波模块采用10阶滑动滤波。
[0034]
进一步的,椭球拟合补偿模块采用的椭球公式为:
[0035]
f(x,y,z)=x2 by2 cz2 2fxy 2gxz 2hyz 2px 2qy 2rz d=0
[0036]
令ξ=[b,c,f,g,h,p,q,r,d]
t
,其中b,c表示待求椭球的曲面的平方项系数,f,g,h表示二次项系数,p,q,r表示一次项系数,d为常数值;
[0037]
h
k
=[x
k
,y
k
,z
k
]
t
,k=1,2,...,n,表示k组三轴磁传感器实际输出值;
[0038]
为n次测量的x轴地磁值,ε=[ε1…
ε
n
]
t
为量测数据到所述椭球曲面对应点的代数距离,结合椭球公式有ε=x2 dξ,其中d为满足椭球方程的观测变量组成的n
×
9维的量测矩阵:
[0039][0040]
所述椭球拟合补偿模块求解最优椭球参数即求解使ε值的平方和最小的椭球系数,用表示最小的ε值,根据最小二乘规则有:
[0041][0042]
所述椭球拟合补偿模块改写椭球公式为:
[0043]
h
t
eh 2f
t
h g=0
[0044]
式中将椭球参数分别写为:f=[p,q,r]
t
,g=d。
[0045]
可将椭球方程改成:
[0046]
(h
‑
h0)
t
k(h
‑
h0)=1
[0047]
式中偏置矩阵h0=
‑
e
‑1f,对比误差模型,有:m=k(h
t
h)
[0048]
将矩阵m进行奇异值分解,得到m=a2u∑u
t
[0049]
式中a∈r,∑=λ(λ1,λ2,λ3)为特征值λ1,λ2,λ3构成的对角阵,u为特征向量矩阵。则标定系数矩阵a=u∑u
t
。
[0050]
所述椭球拟合补偿模块最终标定方程为:
[0051][0052]
式中h为地磁理论值,为温度t下的磁传感器实际输出值,c(t)是温度系数矩阵,b(t)是温漂矩阵,a是旋转体系数矩阵,g旋转体偏置矩阵。
[0053]
一种对三轴磁传感器的旋转体误差补偿与实验方法具体为:
[0054]
旋转体标定环境配置好,将无磁转台水平指北放置;
[0055]
无磁转台顺时针每转动45
°
固定一次,在水平面内共转动8个角度,固定每个角度下的转台并将旋转体顺时针转动旋转体至少三周后逆时针转动至少三周,采集地磁数据;
[0056]
按转台角度分别读取地磁值并选择在旋转体旋转后半段时采集的数据,使采集的地磁值满足椭球标准;
[0057]
初始化滑动滤波系数为10;
[0058]
构建量测数据矩阵d,根据椭球拟合公式计算出椭球矩阵e、f、g与偏置矩阵h0;
[0059]
初始化当地地磁场强度,根据奇异值分解求得特征值λ和特征向量矩阵u,从而求得标定系数矩阵a与偏置矩阵h0;
[0060]
根据最终标定方程用标定系数矩阵a与偏置矩阵h0计算标定后的三轴地磁值。
[0061]
下面结合说明书附图对本发明一种三轴磁传感器的旋转体误差补偿及实验方法作进一步详细说明。
[0062]
实施例
[0063]
如图2所示,一种三轴磁传感器的旋转体误差补偿实验方法为:将组件旋转体水平指北放置于无磁转台上,转台顺时针每转动45
°
角为一个测量点,在每个测量点上沿旋转体
x轴匀速转动旋转体,分别正反转动3圈以上,使地磁原始值的斜置轴y与纵轴z的地磁值均满足平滑的正弦波形,相位相差
[0064]
嵌入式处理器采用stm32f7芯片,误差补偿实验之前上位机给处理器stm32f7初始化当地地磁值、温度系数矩阵c、温度零偏矩阵b;
[0065]
实验时 5v直流稳压电源给组件供电,旋转体尾部通过9针的fgg.0b雷莫接口与moxa uport1150串口线缆连接,实时将三轴磁传感器原始输出值通过串口发送给上位机;
[0066]
上位机通过椭球拟合补偿将最终的标定系数通过串口与fgg.0b雷莫接口发送给stm32f7,stm32f7根据误差模型将地磁原始值与标定系数带入最终标定方程计算,得到误差补偿后的地磁数据,并将该值通过串口传送给上位机监控整个传输过程采用ieee754协议;
[0067]
上位机接收到数据后,首先对各个角度进行分类,形成8个通道数据,并根据传输协议取出三轴地磁原始值,如图3所示,三轴地磁原始值在空间上表现为一个完整椭球的各个椭圆横截面,最大的椭圆在旋转体指东和指西时获得;
[0068]
基于上述装置及实验方法,一种对三轴磁传感器的旋转体误差补偿方法采用滤波与基于最小二乘法的椭球拟合的形式。
[0069]
在获得原始地磁数据后,对各通道地磁值进行去跳点处理,排除人工转动旋转体时可能出现的旋转体滑动对量测地磁值的阶跃影响。采用10阶的滑动滤波进一步减小旋转体转动时人工与外界对旋转体产生的微小扰动和滑动。滤波后的数据选择旋转体旋转的后半段来确保拟合的地磁数据可以稳定的构成平滑椭球的一部分,可以进一步减小标定误差,如图4所示,地磁在经过滤波和筛选后,分散点呈现清晰的椭球分布;
[0070]
图5为整个误差补偿算法的流程图。误差模型中的c矩阵,在保持标定过程中旋转体温度变化很小的情况下设置为单位阵,偏置矩阵b仅与旋转体环境及安装误差相关,与温度无关。椭球方程中旋转轴x的二次项系数设置为1;因为短时间内的地磁场可视为一常数,所以通过球谐计算设置地磁场强度为48375nt。将滤波与预处理后的各通道地磁值拼接成x、y、z坐标矩阵组成椭球截面,带入计算,由最小二乘原理解的椭球系数矩阵e、f;
[0071]
将矩阵m进行奇异值分解,得到m的特征值λ与特征向量u,带入标定方程求解出误差补偿系数a矩阵与偏置矩阵h0。
[0072]
旋转体在指北和指东两个角度下误差补偿后的地磁数据如图6、图7所示,可以看出在经过误差补偿后的地磁值峰峰值与零点偏置值十分接近,具体计算方法为:
[0073]
将误差补偿系数矩阵a通过串口线发送至嵌入式计算器stm32f7,arm芯片将椭球拟合得到的a、h0矩阵与初始化时的c、b矩阵带入标定方程计算得出当前补偿后的地磁值h。
[0074]
补偿后地磁数据通过串口线发送到上位机进行监控,数据三维散点图如图8所示,每个位置上的三轴地磁数据呈现出较为标准的圆形,地磁补偿效果较好。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。