1.本发明属于二维离散数据平滑领域,具体涉及一种基于快速傅里叶变换的二维离散数据平滑方法。
背景技术:
2.在工程实践中,往往受测试条件的影响,只能获取少量的测试数据,如何根据少量测试数据获得更加平滑的结果具有重要的实际意义。
3.目前已有学者提出采用插值方法平滑离散采样数据,如拉格朗日拟合法,分段三次埃米尔特拟合法,最小二乘法,三次样条曲线法等。这些曲线平滑的方法各有其优点,同时它们也都存在一定的局限性,只能在特定的条件下才能使用,不具有普适性,但是它们都极大的提高了曲线的光滑性与精确性。三次样条函数计算较简单,能通过所有采样点,且有二阶连续导数,是较理想的插值工具。武婕等人在“基于三次样条插值的算数傅里叶谐波分析法”中,对三次样条插值法进行了改进,解决了动态曲线的三次样条插值问题,使得测得的离散点可以形成一条平滑的曲线。
4.卜兆林在“关于fft补零充位问题的进一步讨论”中,对一维傅里叶变换补零问题进行了探讨,然其重点为对一维测试数据进行补零,进而获得频谱值。钱辉等为了提高图像处理的运算速度,提出了一种结合频谱移位的二维傅里叶变换的fpga实现方法,通过改变二维傅里叶变换的列变换起始位置,从矩阵的中间列开始进行列变换,使得二维傅里叶变换频谱的零频从矩阵的四个顶角移到中间位置,从而实现在完成二维傅里叶变换的同时完成一半的频谱移位,但其频谱移位是简单进行行、列变换,并未改变频谱幅值。
技术实现要素:
5.本发明针对现有技术中的不足,提供一种基于快速傅里叶变换的二维离散数据平滑方法,旨在解决二维离散数据的快速平滑问题,采用的技术方案如下:
6.一种基于快速傅里叶变换的二维离散数据平滑方法,包括以下步骤:
7.步骤1:将待平滑的二维离散数据通过二维傅里叶变换由空间域变换到波数域,以得到原数据角谱;
8.步骤2:以补零的方式对步骤1中得到的原数据角谱进行扩展,得到扩展角谱;
9.步骤3:将步骤2中得到的扩展角谱通过二维傅里叶逆变换由波数域变换到空间域,以得到平滑后的二维离散数据。
10.进一步地,步骤1中原数据的角谱根据以下公式计算获取:
[0011][0012]
其中,p(m
x
δx,m
y
δy)为待平滑的二维离散数据坐标(m
x
δx,m
y
δy)处的数值,δx、δy分别为空间域坐标x方向、y方向上的空间采样间隔,m
x
=0,1,2,
…
,n
x
‑
1,m
y
=0,1,2,
…
,n
y
‑
1,n
x
、n
y
分别为空间域和波数域坐标x方向、y方向上的离散数据点个数,p(n
x
δk
x
,
n
y
δk
y
)为原数据角谱坐标(n
x
δk
x
,n
y
δk
y
)处的数值,n
x
=0,1,2,
…
,n
x
‑
1,n
y
=0,1,2,
…
,n
y
‑
1,δk
x
与δk
y
分别为波数域坐标k
x
方向、k
y
方向上的波数域间隔,且δk
x
=2π/(m
x
δx),δk
y
=2π/(m
y
δy),k
x
=n
x
δk
x
,k
y
=n
y
δk
y
,j为虚数单位。
[0013]
进一步地,步骤2中,原数据角谱在波数域坐标k
x
方向、k
y
方向上的数据点个数分别为n
x
、n
y
,扩展角谱在波数域坐标k
x
方向、k
y
方向上的数据点个数分别为2n
x
、2n
y
,且原数据角谱与扩展角谱之间的关系为:
[0014][0015][0016][0017][0018]
其中,p(
·
,
·
)与p
′
(
·
,
·
)分别表示原数据角谱、扩展角谱相应坐标处的数据值,对于扩展角谱,除以上公式给定的坐标处的数据值外,其余坐标处的数据值均为零。
[0019]
进一步地,步骤3中,平滑后的二维离散数据根据以下公式计算获取:
[0020]
[0021]
其中,p
′
(m
x
′
δx
′
,m
y
′
δy
′
)为平滑后的二维离散数据坐标(m
x
′
δx
′
,m
y
′
δy
′
)处的数值,m
x
′
=0,1,2,
…
,2n
x
‑
1,m
y
′
=0,1,2,
…
,2n
y
‑
1,δx
′
=δx/2,δy
′
=δy/2,n
x
′
=m
x
′
,n
y
′
=m
y
′
,n
x
′
=2n
x
,n
y
′
=2n
y
。
[0022]
本发明通过快速傅里叶变换将二维离散数据由空间域变换到波数域,并在波数域中进行补零扩展,最后逆变换回空间域,实现了二维离散数据的快速平滑。
附图说明
[0023]
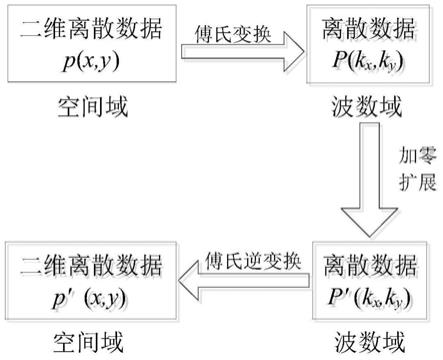
图1为本发明方法的流程示意图。
[0024]
图2为本发明实施例中待平滑的二维离散数据。
[0025]
图3为本发明实施例中待平滑的二维离散数据的一次平滑结果图。
[0026]
图4为本发明实施例中待平滑的二维离散数据的二次平滑结果图。
具体实施方式
[0027]
现在结合附图对本发明作进一步详细的说明。
[0028]
参见图1,本发明首先将待平滑的二维离散数据通过二维傅里叶变换由空间域变换到波数域,以得到原数据角谱。本实施例中待平滑的二维离散数据如图2所示,此离散数据是随机生成的数据。空间域x、y方向上的数据点个数均为16,空间采样间隔均为0.1,图中标注了四个特定点的数值,以便与平滑后的结果进行对比。具体的变换公式为
[0029][0030]
其中,p(m
x
δx,m
y
δy)为待平滑的二维离散数据坐标(m
x
δx,m
y
δy)处的数值,δx、δy分别为空间域坐标x方向、y方向上的空间采样间隔,m
x
=0,1,2,
…
,n
x
‑
1,m
y
=0,1,2,
…
,n
y
‑
1,n
x
、n
y
分别为空间域和波数域坐标x方向、y方向上的离散数据点个数,p(n
x
δk
x
,n
y
δk
y
)为原数据角谱坐标(n
x
δk
x
,n
y
δk
y
)处的数值,n
x
=m
x
,n
y
=m
y
,δk
x
与δk
y
分别为波数域坐标k
x
方向、k
y
方向上的波数域间隔,且δk
x
=2π/(m
x
δx),δk
y
=2π/(m
y
δy),k
x
=n
x
δk
x
,k
y
=n
y
δk
y
,j为虚数单位。
[0031]
然后,以补零的方式对原数据角谱进行扩展,得到扩展角谱。原数据角谱在波数域坐标k
x
方向、k
y
方向上的数据点个数分别为n
x
、n
y
,扩展角谱在波数域坐标k
x
方向、k
y
方向上的数据点个数分别为2n
x
、2n
y
,且原数据角谱与扩展角谱之间的关系为:
[0032]
[0033][0034][0035][0036]
其中,p(
·
,
·
)与p
′
(
·
,
·
)分别表示原数据角谱、扩展角谱相应坐标处的数据值,对于扩展角谱,除以上公式给定的坐标处的数据值外,其余坐标处的数据值均为零。
[0037]
最后,将扩展角谱通过二维傅里叶逆变换由波数域变换到空间域,以得到平滑后的二维离散数据,具体的变换公式为
[0038][0039]
其中,p
′
(m
x
′
δx
′
,m
y
′
δy
′
)为平滑后的二维离散数据坐标(m
x
′
δx
′
,m
y
′
δy
′
)处的数值,m
x
′
=0,1,2,
…
,2n
x
‑
1,m
y
′
=0,1,2,
…
,2n
y
‑
1,δx
′
=δx/2,δy
′
=δy/2,n
x
′
=m
x
′
,n
y
′
=m
y
′
,n
x
′
=2n
x
,n
y
′
=2n
y
。
[0040]
图3是利用本发明的方法对已知二维离散数据进行第一次平滑后的结果,通过与图2中四个特定点的数值对比,可以发现:平滑后原数据点处的数值保持不变。图4是对已知二维数据进行第二次平滑后的结果,可知二次平滑后原数据点处的数值依然保持不变。
[0041]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。