1.本发明属于未爆弹探测技术领域,具体涉及未爆弹空中磁法探测系统及方法。
背景技术:
2.未爆弹的及时探测定位是保障靶场安全的重要环节之一。目前磁法探测对于铁磁性未爆弹的探测是最经济、最有效的方法。人工探测、车载探测等传统手段存在探测效率低、探测能力差、自动化程度低以及安全性和准确性不高等问题,如何快速、准确定位未爆弹,是一个亟待解决的难题。
技术实现要素:
3.本发明的目的在于:针对未爆弹的搜索、识别和定位需求,提出一种未爆弹空中磁法探测系统及方法,通过无人机平台搭载磁探测载荷,采取远程无人作业方式从根本上解决探测效率和人员安全问题,实现未爆弹的安全高效探测,提高靶场未爆弹探测效率。
4.本发明包括如下技术方案:
5.第一方面,一种未爆弹空中磁法探测系统,包括:无人机平台、磁探测载荷和地面数据处理终端;
6.磁探测载荷吊装在无人机平台下,地面数据处理终端具备无人机航迹规划功能和数据处理功能;
7.无人机平台用于获得飞行的高度数据,差分rtk定位数据和姿态数据并传输至地面数据处理终端;
8.磁探测载荷用于获得多通道磁探测数据并传输至地面数据处理终端;
9.地面数据处理终端接收所述高度数据,差分rtk定位数据、姿态数据和多通道磁探测数据,用于获得总场磁图和梯度张量图,根据总场磁图判断未爆弹的有无,根据梯度张量图输出未爆弹的位置及深度信息;同时,地面数据处理终端用于规划无人机航迹并将航迹上传至无人机平台。
10.可选地,无人机平台为低磁特性多旋翼无人机,机身采用无磁结构,具备高频磁干扰的屏蔽结构。
11.可选地,无人机平台、磁探测载荷之间的垂直距离不大于无人机平台的最大轴距、且不小于无人机平台最大轴距的1/2。
12.可选地,无人机平台包括:飞行控制系统、姿态控制单元、对地测距雷达和差分rtk模块;
13.对地测距雷达用于获得飞行的高度数据;
14.差分rtk模块用于获得差分rtk定位数据;
15.姿态控制单元用于获得飞行的姿态数据。
16.飞行控制系统根据对地测距雷达获得的高度数据和差分rtk模块获得的差分rtk定位数据进行高度控制,实现增稳模式。
17.可选地,增稳模式下,无人机平台飞行高度误差不大于飞行高度的10%。
18.可选地,磁探测载荷为由多个三轴矢量磁传感器组成的阵列,三轴矢量磁传感器的三个测量轴两两正交,实现对磁场三分量的测量,三轴矢量磁传感器安装在无磁材料的结构件上构成阵列;
19.磁探测载荷获取的磁探测数据包括磁场总场信息和梯度矢量磁信息。
20.可选地,磁探测载荷三轴矢量磁传感器的单传感器正交度误差小于0.1
°
;磁探测载荷不同三轴矢量磁传感器的三个测量轴方向的一致性误差小于0.1
°
。
21.可选地,地面数据处理终端包括:无人机航迹规划软件、磁干扰补偿软件、磁信号分析与识别软件;
22.无人机航迹规划软件规划无人机航迹,生成“弓”字形往复直线航迹,航迹编历目标区域范围;
23.磁干扰补偿软件根据所述姿态数据,对多通道磁探测数据进行补偿处理,并向磁信号分析与识别软件输出补偿后的数据,使补偿后数据中的磁干扰降低至1nt以下;
24.磁信号分析与识别软件接收磁干扰补偿软件传输的补偿后的数据,对补偿后数据进行处理,同时,根据所述高度数据,差分rtk定位数据和姿态数据,采用总场磁图法和梯度张量法进行未爆弹的识别和反演定位,获得未爆弹的有无情况、位置及深度信息。
25.第二方面,一种应用如第一方面所述统进行未爆弹空中磁法探测的方法,包括以下步骤:
26.在未爆弹的安全距离外进行装备展开,将磁探测载荷安装于无人机平台下方;
27.地面数据处理终端规划无人机航迹并将航迹上传至无人机平台;
28.无人机平台搭载磁探测载荷按照无人机航迹进行自动飞行探测,同时,将无人机平台的差分rtk定位数据和姿态数据与磁探测载荷的多通道磁探测数据组帧实时回传至地面数据处理终端;
29.地面数据处理终端实时接收并存储组帧数据;
30.地面数据处理终端对组帧数据进行磁补偿处理、数据筛选处理和区域插值处理,然后进行磁信号分析和识别处理,获得总场磁图和梯度张量图,根据总场磁图判断未爆弹的有无,根据梯度张量图输出未爆弹的位置及深度信息。
31.所述无人机航迹,具体为:
32.在抵近探测区域上方前,控制无人机平台前往探测区域;飞行速度大于或等于5m/s;
33.在抵达探测区域上方后,无人机平台的飞行高度降低至离地高度1~2米,飞行速度小于或等于3m/s,同时,对探测区域进行“弓”字形往复探测;
34.在完成探测区域的探测后,无人机提高飞行高度,返回降落至出发点。
35.本发明与现有技术相比具有如下优点:
36.1)本发明描述了一种未爆弹空中磁法探测系统及方法,通过无人机平台搭载磁探测载荷远程无人自主探测未爆弹,探测效率高,保障人员安全。
37.2)本发明未爆弹空中磁法探测系统在探测过程中实时组帧数据,磁探测数据与rtk定位数据和无人机姿态数据实时匹配,可降低数据匹配误差,未爆弹定位结果更准确。
38.3)本发明未爆弹空中磁法探测系统采用快拆高脚架结构,使磁探测载荷远离无人
机平台,同时对无人机平台进行磁屏蔽结构及低磁设计,有效降低无人机平台的干扰。
39.4)本发明未爆弹空中磁法探测方法采用总场磁图法和梯度张量法,对磁探测数据进行多维度处理,充分利用探测信息,识别结果准确度更高。
附图说明
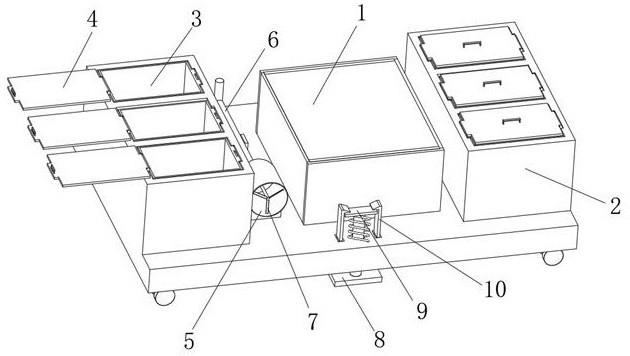
40.图1为本发明系统构成示意图;
41.图2为本发明航迹规划图;
42.图3为本发明探测结果图。
具体实施方式
43.本发明针对目前未爆弹探测的局限性,提出一种未爆弹空中磁法探测系统及方法,由无人机平台、磁探测载荷和地面数据处理终端组成,根据下达任务指令,对目标区域进行快速搜索探测,实现任务范围内未爆弹的快速识别定位。
44.本发明一种未爆弹空中磁法探测系统,包括:无人机平台、磁探测载荷和地面数据处理终端。
45.磁探测载荷与无人机平台采用上下分布的结构形式,磁探测载荷吊装在无人机平台下,结构采用快拆刚性高脚架,使磁探测载荷远离无人机平台。地面数据处理终端具备无人机航迹规划功能和数据处理功能;
46.无人机平台、磁探测载荷之间的垂直距离不大于无人机平台的最大轴距、不小于无人机平台最大轴距的1/2。
47.无人机平台为低磁特性多旋翼无人机,机身采用碳纤维、塑料等无磁结构,具备电机等高频磁干扰的屏蔽结构。
48.无人机平台具备增稳模式,无人机平台包括:飞行控制系统、姿态控制单元、对地测距雷达和差分rtk模块;
49.对地测距雷达用于获得飞行的高度数据,高度定义为高脚架底端距离地面的距离;
50.差分rtk模块用于获得差分rtk定位数据;
51.姿态控制单元用于获得飞行的姿态数据。
52.无人机平台的飞行控制系统根据对地测距雷达获得的高度数据和差分rtk模块获得的差分rtk定位数据对无人机平台进行高度控制,实现增稳模式,增稳模式下无人机平台飞行高度误差不大于飞行高度的10%,可搭载磁探测载荷进行低空仿地飞行(飞行高度1~2米)。
53.磁探测载荷为由多个三轴矢量磁传感器组成的阵列,三轴矢量磁传感器的三个测量轴两两正交,实现对磁场三分量的测量,三轴矢量磁传感器安装在碳纤维杆、高强度塑料等无磁高强度轻重量结构件上构成阵列,阵列结构稳定不易变形。磁探测载荷能够同步采集多通道磁探测数据,磁探测数据包括磁场总场信息和梯度矢量磁信息。为方便获取梯度矢量磁信息,磁探测载荷上各个三轴矢量磁传感器的三个测量轴方向一致。
54.需要对磁探测载荷三轴矢量磁传感器的正交度进行校正,校正以后单传感器正交度误差小于0.1
°
;磁探测载荷校正各个三轴矢量磁传感器的三个测量轴方向的一致性,校
正后不同三轴矢量磁传感器的三个测量轴方向的一致性误差小于0.1
°
。
55.进行未爆弹探测作业时,将无人机平台的差分rtk定位数据、姿态数据、高度数据与磁探测载荷的多通道磁探测数据同步组帧输出组帧数据,经过数传回传至地面数据处理终端。
56.地面数据处理终端包括:无人机航迹规划软件、磁干扰补偿软件、磁信号分析与识别软件;
57.无人机航迹规划软件规划无人机航迹,生成“弓”字形往复直线航迹,航迹编历目标区域范围;
58.磁干扰补偿软件根据组帧数据中的无人机姿态数据,对多通道磁探测数据进行补偿处理,并向磁信号分析与识别软件输出补偿后数据,使补偿后数据中的磁干扰降低至1nt以下;
59.磁信号分析与识别软件处理补偿后数据,采用总场磁图法和梯度张量法进行未爆弹的识别和反演定位,获得未爆弹的有无情况、位置及深度信息。
60.快拆刚性高脚架上端与无人机连接,下端与磁探测载荷连接,连接处采用快拆机构,可快速拆卸,同时具备锁死结构,锁死后无人机平台与磁探测载荷形成刚性连接体,高脚架采用线着地方式,增大无人机着地面积,提高无人机起降稳定性。
61.一种未爆弹空中磁法探测方法,包括以下步骤:
62.在未爆弹的安全距离外进行装备展开,磁探测载荷安装于无人机平台下方;
63.地面数据处理终端规划无人机航迹并将航迹上传至无人机平台;
64.无人机平台搭载磁探测载荷按照规划航迹进行自动飞行探测,并将无人机平台的差分rtk定位数据和姿态数据与磁探测载荷的多通道磁探测数据组帧实时回传至地面数据处理终端;
65.地面数据处理终端实时接收并存储组帧数据;
66.在无人机平台返航后,地面数据处理终端对组帧数据进行磁补偿处理、数据筛选处理和区域插值处理,然后进行磁信号分析和识别处理,获得总场磁图和梯度张量图,根据总场磁图判断未爆弹的有无,根据梯度张量图输出未爆弹的位置及深度等信息;
67.经过综合分析,最终输出本次未爆弹探测的结果。
68.无人机航迹为以≥5m/s的速度、高度超过前往探测区域路径上障碍物高度、快速高飞抵近探测区域上方,降低飞行高度至离地高度1~2米,然后贴地慢飞以≤3m/s的速度对探测区域进行“弓”字形往复详细探测,探测结束后无人机提高高度,快速高飞返回降落。
69.所述数据筛选处理,具体为:根据组帧数据中的无人机姿态数据,将无人机做大机动时的数据截取删除,不参与磁信号分析与识别。
70.如图1所示,无人机平台是搭载探测设备的平台,实施例选用六旋翼电动无人机作为搭载探测设备的平台,六旋翼电动无人机具备航线规划与自主飞行能力,按照地面数据处理终端规划航迹进行远程无人自主作业;六旋翼电动无人机具备增稳模式,增稳模式启动对地测距雷达和rtk融合定位,增稳模式下飞行高度误差≤0.2m,可搭载探测载荷进行低空仿地飞行(飞行高度1~2米)。
71.对地测距雷达采用毫米波雷达,通过天线发射面向地面发射电磁波信号,发射信号被地面反射后由天线接收面接收,根据发射信号和接收信号的时间差,可以实时计算出
无人机的对地飞行高度,测距范围为0.1~50米,典型测距精度
±
0.02米。
72.仿地飞行时,对地测距雷达受俯仰角的测量影响较大,需校正俯仰角对高度测量影响,当无人机存在一个俯仰角γ(正值表示抬头)的时候,雷达检测的距离转换成垂直高度,通过三角函数关系,即h=s
×
cos(α γ),其中α是安装角,可实现测量高度校正。
73.无人机搭载rtk定位系统采用hns628高精度定位定向板卡进行设备定制集成,天线采用hwa
‑
pt
‑
a300无人机天线,该天线重量轻,体积小,适用于无人机安装,水平定位误差为1cm,垂直定位误差为2cm。
74.以对地测距雷达的高度数据和rtk定位数据为基准对无人机进行高度控制,确保在飞行过程中的对地高度保持不变,以此实现仿地飞行功能。
75.实施例中磁探测载荷采用磁传感器阵列,由四个三轴矢量磁通门传感器组成,四个磁通门传感器通过碳纤维杆、高强度塑料结构件组成平面四边形阵列,保证结构强度,减少磁干扰和重量。既可探测范围空间内的梯度矢量磁信息,又可通过计算得出磁场总场分布。为方便获取梯度矢量磁信息,磁探测载荷上各个三轴矢量磁传感器的三个测量轴方向一致。
76.为了实现对磁场三分量的测量,三轴磁通门传感器内部由三个磁探头组成一个正交的测量坐标系。但是由于受到加工工艺和安装水平的限制,三个磁探头构成的测量坐标系一定存在误差,组成测量坐标系的三个磁探头不可能完全正交。在标准磁场试验室中对上述误差进行校准,校准后校正以后单传感器正交度误差小于0.1
°
。磁探测载荷校正各个三轴矢量磁传感器的三个测量轴方向的一致性,校正后各个三轴矢量磁传感器的三个测量轴方向的一致性误差小于0.1
°
。
77.实施例中无人机平台与磁探测载荷连接结构采用4根“t”型碳纤维杆,长杆上端与无人机机臂连接,下端与磁探测载荷的碳纤维横杆连接,连接处采用快拆机构,可快速拆卸,同时具备锁死结构,锁死后无人机平台与磁探测载荷形成刚性连接体,无人机平台在上,磁探测载荷在下,呈上下平行分布,无人机机身距磁探测载荷的距离为80cm。“t”型碳纤维杆的短杆着地,增大无人机着地面积,提高无人机升降稳定性。
78.应用无人机干扰磁场抑制及补偿技术,具体方法如下:
79.将磁通门传感器处的无人机产生的磁干扰建模为
[0080][0081]
其中,u
i
(t)是地磁场在无人机载体坐标系中的方向余弦,是u
i
(t)对时间的导数,p
i
,a
ij
和b
ij
分别为恒定磁干扰、感应磁干扰和涡流磁干扰的补偿系数。
[0082]
构建磁屏蔽结构补偿无人机机载电气设备动态电流产生的磁干扰,然后利用前馈算法求解磁干扰模型中的相关系数。磁补偿的取值、补偿和检查飞行,要求在天气好、风速小(<5m/s)、能见度好、静磁日进行,并同时进行磁日变观测,做日变校正。
[0083]
地面数据处理终端包含无人机航迹规划软件、磁干扰补偿软件、磁信号分析与识别软件。无人机航迹规划软件规划无人机航迹,生成“弓”字形往复直线航迹,航迹编历目标区域范围,如图2所示。磁干扰补偿软件根据组帧数据中的无人机姿态数据补偿磁探测数据,输出补偿后数据,使补偿后数据中的磁干扰降低至1nt以下。磁信号分析与识别软件处
理补偿后数据,采用总场磁图法和梯度张量法进行未爆弹的识别和反演定位,获得未爆弹的有无、位置及深度等信息。
[0084]
在收到探测区域坐标后,在无人机航迹规划软件上进行航迹规划,无人机搭载磁探测载荷按照航迹自主探测。由于未爆弹具有危险性,在距离探测区域300米处展开设备,设置无人机的起飞降落点,设置直线航迹,快速前往探测区域,高度应该设置超过路径中的最高障碍物。到达探测区域后,降低飞行高度,开展直线往复探测(该直线可与正北方向呈任意夹角进行探测),为不遗漏未爆弹,航迹的疏密程度可根据未爆弹的磁特性具体选择,航迹应编历整个探测区域(典型遍历路径为沿南北向直线往复探测,若需补充探测,再沿着东西向直线往复补充探测),探测速度设置较慢(≤3m/s)。探测区域完成后,开始返航,返航速度可以设置较快(≥5m/s),高度应该设置超过路径中的最高障碍物。以某次探测航迹为例。前往探测区域的飞行速度设置6m/s,路径途经地表植物高约3m,高度设置为5m,探测区域内直线往复航迹的飞行速度设置为2m/s,高度为1m,航迹间距为1m,返航的飞行速度设置为6m/s,路径途经障碍建筑高约6m,高度设置为10m,飞行任务执行时间小于5分钟。
[0085]
对探测的数据进行筛选,探测数据为组帧数据,每一帧数据包括无人机的姿态数据,位置数据和多通道磁探测数据。根据无人机的姿态数据中的俯仰和横滚角度范围对数据进行筛选,当某一帧组帧数据中的俯仰和横滚的角度超过
±5°
时,则这一帧被舍弃,不再参与后期数据处理。对探测区域内的所有组帧数据进行筛选,筛选后的数据将被用来进行识别和定位未爆弹。
[0086]
磁信号分析与识别软件对筛选后的进行磁数据处理:采用总场磁图法和梯度张量法,总场磁图结果和梯度张量结果如图3所示,综合两个处理结果,得出未爆弹的位置和深度,结合卫星定位数据形成位置坐标信息,完成地下目标探测任务。
[0087]
未爆弹探测作业工作流程如下:
[0088]
1)在未爆弹的安全距离外进行装备展开,磁探测载荷安装于无人机平台下方;
[0089]
2)地面数据处理终端规划无人机航迹并将航迹上传至无人机平台;
[0090]
3)无人机平台搭载磁探测载荷按照规划航迹进行自动飞行探测,并将无人机平台的差分rtk定位数据和姿态数据与磁探测载荷的多通道磁探测数据组帧实时回传至地面数据处理终端;
[0091]
4)地面数据处理终端实时接收并存储组帧数据;
[0092]
5)在无人机平台返航后,地面数据处理终端对组帧数据进行磁补偿操作、数据筛选操作和区域插值操作,然后进行磁信号分析和识别,获得总场磁图和梯度张量图,根据总场磁图判断未爆弹的有无,根据梯度张量图输出未爆弹的位置及深度等信息;
[0093]
6)经过综合分析,最终输出本次未爆弹探测的结果。
[0094]
本发明说明书中未作详细描述的内容属于本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。