1.本发明属于雷达探测与成像技术领域,具体适用于分布式雷达相参融合成像。
背景技术:
2.分布式雷达发射站与接收站的空间分集,可以在短时间内高分辨率相参融合成像,为机载及弹载等平台的全天时、全天候探测提供技术手段,与传统单基合成孔径雷达和双基合成孔径雷达相比,具备灵活的空间几何构型与成像视角优势,且能够大幅缩短雷达高分辨成像所需的合成孔径时间。但是在分布式类型系统中,由于接收站间相对于目标的视角的不连续性,会引起分布式雷达获得间断的空间谱,将导致重建出的目标点扩散函数呈现出分裂的主瓣和高的旁瓣,严重降低分布式雷达的成像质量。
3.为了实现分布式雷达系统多站测量数据的相参数据融合,在文献“krishnan,v.,j.swoboda,can evren yarman,and birsen yazici."multistatic synthetic aperture radar image formation."ieee transactions on image processing 19,no.5(2009):1290
‑
1306”中,提出了一种快速后向投影的分布式雷达成像方法,该方法通过各平台的空间几何位置,采用后向相参投影实现回波的聚焦,但在分布式雷达获取的空间谱间断时,目标主瓣将无法实现聚焦;在文献“li,zhixi,scott papson,and ram m.narayanan."data
‑
level fusion of multilook inverse synthetic aperture radar images."ieee transactions on geoscience and remote sensing 46,no.5(2008):1394
‑
1406”中,提出了一种基于矩阵傅里叶变换的分布式雷达数据相参融合方法,但该方法仍无法解决在空间谱数据间断时的主瓣分裂问题。
技术实现要素:
4.为解决现有技术存在的上述问题,本发明提出了一种分布式雷达空间谱相参融合成像方法。
5.本发明的具体技术方案为:一种分布式雷达空间谱相参融合成像方法,具体包括如下步骤:
6.步骤一:分布式雷达回波信号模型建立,
7.发射机位置的极坐标为主接收机的欧式坐标为(x1,y1,h1),主接收机与从接收机的坐标差为(δx,δy,δz);主接收机飞向参考目标o,速度为其中,v分别表示速度方向和大小,设参考目标o位于坐标原点(0,0,0),观测目标p位于(x,y,0).发射机辐射宽带信号观测目标点p,其回波数据与参考目标o的回波数据进行匹配滤波,得到目标p回波的距离频率域表达式:
[0008][0009]
其中,f
t
表示距离频率,τ表示慢时间变量,a表示回波幅度,t
a
表示合成孔径时间,
k
r
表示调频率,t
r
表示发射信号时宽,c表示光速,f
c
表示载波频率,r'
op
(τ)表示目标o与目标p的距离历史差,表示为:
[0010][0011]
其中,r
p1
与r
o1
分别表示目标p与目标o的距离历史和,r
tp
(τ)和r
rp
(τ)分别表示发射机和主接收机相对于目标p之间随时间τ的距离变化,r
t
(τ)和r1(τ)分别表示发射机和主接收机相对于目标o之间随时间τ的距离变化,θ
t
分别表示发射机的俯仰角和方位角,θ
r1
分别表示主接收机的俯仰角和方位角;
[0012]
对于发射机与主接收机构成的雷达系统,其x和y方向的空间频率表示为:
[0013][0014]
其中,k
f
=2π(f
c
f
t
)/c表示发射信号的空间频率;
[0015]
将式(1)中的回波信号通过式(3)进行变量代换,得到主接收机的回波信号的空间谱表达式:
[0016]
s1(k
x1
,k
y1
)=a
·
exp[j(xk
x1
yk
y1
)]
ꢀꢀꢀ
(4)
[0017]
根据从接收机的俯仰角和方位角θ
r1
,通过式(1)
‑
(3)得到从接收机的回波信号的空间谱表达式:
[0018]
s2(k
x2
,k
y2
)=a
·
exp[j(xk
x2
yk
y2
)]
ꢀꢀꢀ
(5)
[0019]
投影所得到的空间谱分布,该区域的范围可以定义为:
[0020][0021]
其中,k
x
和k
y
表示x和y方向的空间频率向量,[k
xmin
,k
xmax
]和[k
ymin
,k
ymax
]分别表示k
x
和k
y
在x和y方向的取值范围,f
t
∈b,b是系统带宽,τ∈t
a
;
[0022]
根据主接收机和从接收机的飞行路径及系统参数,将回波数据相干地投影到空间谱得到:
[0023][0024]
进而得到重建的点散布函数:
[0025][0026]
其中,σ(x,y)为目标散射系数,ω为空间谱的分布范围;
[0027]
步骤二:广义带宽合成方向选取;
[0028]
首先,空间谱沿任意方向φ
i
的外切矩型面积为:
[0029]
s
r
(φ
i
)=b
ρf
(φ
i
)
·
b
ρf
(φ
i
π/2)
ꢀꢀ
(9)
[0030]
其中,b
ρf
(φ
i
)和b
ρf
(φ
i
π/2)分别代表空间谱在φ
i
及其正交方向上的带宽投影;
[0031]
然后,定义空间谱分布在φ
i
方向的填充因子为:
[0032][0033]
其中,s
ω
代表空间谱分布面积。
[0034]
最后,求解最大填充率方向:
[0035][0036]
其中,i表示通过复radon变换的投影片段数量,即为广义带宽合成方向,其对应的单位向量为:
[0037][0038]
的正交方向对应的单位向量为:
[0039][0040]
步骤三:二维空间谱数据的投影校正;
[0041]
将式(6)的空间谱向量k
x
和k
y
进行变换:
[0042][0043]
其中,a
rot
为旋转矩阵:
[0044][0045]
对距离频率域的回波数据进行sinc插值来校正投影:
[0046][0047]
其中,表示二维傅里叶变换,s(t,f
τ
)表示匹配滤波后的距离时间
‑
方位频率域回波,回波s(t,f
τ
)的大小为n
r
×
n
c
,n
r
为距离向长度,n
c
为方位向长度;经上式插值后大小为m
×
l。在处的空间谱,其投影后的坐标为:
[0048][0049]
其中,m=1,2,
…
,m,l=1,2,
…
,l,k
′
x
(e)和分别表示在处沿和方向的空间谱采样坐标,δk
′
x
和δk
′
y
分别表示沿和方向的空间谱采样间隔,(k
′
xc
,k
′
c
)代表空间谱分布的中心坐标;
[0050]
步骤四:基于广义矩阵束的空间谱外推补偿;
[0051]
将k
x
′
方向的主接收机和从接收机回波数据进行归一化:
[0052][0053]
其中,l1=1,2,
…
,l1,l2=1,2,
…
,l2,且l=l1 l
δ
l2,l
δ
是间隙数据的数量,u表示沿广义带宽合成方向的全极点模型的极点个数,a
u1
和a
u2
表示信号幅度,x
′
u
表示目标在广义带宽合成方向上的位置,k
′
x
(l1)和k
′
x
(l2)分别表示主接收机和从接收机经过步骤三投影校正后的空间谱,k
′
δx
表示间隙信号之间的相位差,n1(l1)和n2(l2)表示接收机观测到的加性噪声。
[0054]
通过式(18),得出全极点信号模型表示为:
[0055][0056]
其中,l=1,2,
…
,l,a
u
表示信号幅度,n(l)表示接收机观测到的加性噪声,;
[0057]
由s
′1(l1)和s
′2(l2)分别生成hankel矩阵h1和h2,得到如下方程:
[0058]
h1‑
λh2=0
ꢀꢀ
(20)
[0059]
其中,λ为广义特征值;
[0060]
求解方程(20),得到对y(l)极点k
′
x
(l)的估计;
[0061]
由估计的u阶极点组成范德蒙矩阵z1,得到如下方程:
[0062][0063]
其中,y=(y(1),
…
,y(l1))
t
表示主接收机回波数据,求解方程可以得到y(l)幅度a
u
的估计,根据估计的极点k
′
x
(l)和幅度a
u
,得到(19)中信号模型y(l)的全极点表示形式,通过该模型外推出分布式雷达的缺失空间谱,与已有的空间谱融合,获得补全后的完整空间谱;
[0064]
步骤五:目标重建与几何校正;
[0065]
根据步骤四中外推得到的完整空间谱,目标散射系数可以表示为:
[0066][0067]
其中,ω
′
表示完整的空间谱分布区域;
[0068]
经过下式的几何校正得到x
‑
y平面上的成像结果:
[0069][0070]
其中,(x,y)和(x
′
,y
′
)分别表示目标在x
‑
y和x
′‑
y
′
平面上的位置坐标,为步骤三式(13)中旋转矩阵的逆。
[0071]
本发明的有益效果:本发明的空间谱相参融合成像方法首先建立分布式雷达的几何构型,分析了分布式雷达回波相参信号模型;其次,根据回波空间谱分布形状选取了带宽合成方向,完成了空间谱的旋转与数据投影校正;接着,采用广义矩阵束数据外推方法对缺失空间谱进行数据的相参内插,实现了移不变模式下分布式雷达分裂空间谱的补偿;最后,
采用二维傅里叶变换,实现了空间谱域到目标空间域的映射,并通过几何校正得到高分辨成像结果。本发明的成像方法通过矩阵束方法对雷达回波的空间谱进行数据补偿,获得完整的空间谱,再对空间谱进行傅里叶变换得到目标的点散布函数,完成对目标的重建。在空间谱分布不连续采样的情况下,仍能够有效地重建出高分辨率相参融合成像结果,实现了对目标的高分辨成像,解决了移不变模式下分布式雷达分裂空间谱的融合成像问题。
附图说明
[0072]
图1为本发明所述方法流程图;
[0073]
图2为本发明分布式雷达成像系统几何模型示意图;
[0074]
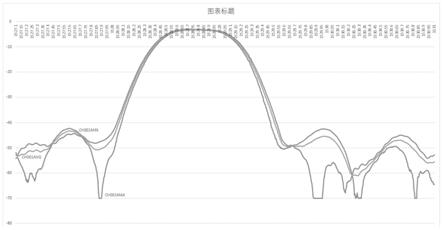
图3不连续空间谱补偿前后对比示意图。
[0075]
图4不同方法融合成像处理结果对比示意图。
具体实施方式
[0076]
本发明中的步骤、结果在matlab仿真平台上进行了验证,以下给出本发明方法的具体实施步骤。
[0077]
步骤一:分布式雷达回波信号模型建立
[0078]
本实施方案所采用的系统参数如表1所示,分布式雷达成像系统几何模型示意图如图2所示。
[0079]
表1
[0080]
参数数值发射机t位置(514km,0,11.2
°
)主接收机r1位置(0,
‑
10,2)km从接收机r2相对位置(30,0,300)m载频频率f
c
15ghz信号带宽b100mhz采样频率f
s
150mhz脉冲重复频率prf500hz平台速度大小v100m/s合成孔径时间t
a
8s全极点模型阶数u5
[0081]
本雷达系统共包含一个发射机和两个接收机。接收机1为主接收机,接收机2为从接收机。发射机位置的极坐标为主接收机的欧式坐标为(x1,y1,h1);从接收机与主接收机的坐标差为(δx,δy,δz);主接收机飞向参考目标o,速度为其中v分别表示速度方向和大小。设参考目标o位于坐标原点(0,0,0),观测目标p位于(x,y,0).发射机辐射宽带信号观测目标点p,其回波数据与参考目标o的回波数据进行匹配滤波,可得到目标点p处回波的距离频率域表达式为:
[0082]
[0083]
其中,f
t
表示距离频率,τ表示慢时间,a表示回波幅度,t
a
表示合成孔径时间,k
r
表示调频率,t
r
表示发射信号时宽,c表示光速,f
c
表示载波频率。o与p的距离历史差r'
op
(τ)可由目标p与目标o的距离历史r
p1
与r
o1
表示为:
[0084][0085]
图2中的主接收机和从接收机分别与发射机构成双基前视合成孔径雷达系统。主接收机与发射机构成的双基合成孔径雷达系统的空间频率可表示为:
[0086][0087]
其中,k
f
=2π(f
c
f
t
)/c表示发射信号的空间频率。通过坐标投影得到回波的空间谱表示:
[0088]
s1(k
x1
,k
y1
)=a
·
exp[j(xk
x1
yk
y1
)]
ꢀꢀ
(27)
[0089]
回波空间谱的空间谱分布取值范围为:
[0090][0091]
其中,k
x
和k
y
表示x和y方向的空间频率向量,f
t
∈b,b是系统带宽,τ∈t
a
。对主接收机和从接收机的回波进行相干投影,得到多基前视合成孔径雷达的空间谱为:
[0092][0093]
由此得到重建的点散布函数:
[0094][0095]
其中,σ(x,y)为目标散射系数,ω为空间谱的分布范围。
[0096]
步骤二:广义带宽合成方向选取
[0097]
根据步骤一式(29)中获得的一发两收分布式雷达空间谱分布结果,需要求出广义带宽合成方向φ,以便后续进行空间谱数据外推。首先空间谱沿φ
i
方向的外切矩型面积为:
[0098]
s
r
(φ
i
)=b
ρf
(φ
i
)
·
b
ρf
(φ
i
π/2)
ꢀꢀꢀꢀꢀꢀ
(31)
[0099]
式中b
ρf
(φ
i
)和b
ρf
(φ
i
π/2)分别代表空间谱在φ
i
及其垂直方向上的带宽投影。
[0100]
为了实现最小化外推的空间谱间隙,求出空间谱分布在φ
i
方向的填充因子:
[0101][0102]
式中s
ω
代表空间谱分布面积。通过下式求出最大填充率方向:
[0103]
[0104]
式中i表示通过复radon变换的投影片段数量。最大填充率方向对应的单位向量即为广义带宽合成方向:
[0105][0106]
步骤三:二维空间谱数据的投影校正
[0107]
在步骤二中,获得了分布式雷达广义空间谱分布旋转投影方向,在实现空间谱数据沿投影方向的精确映射,需要先将投影得到的空间谱数据进行坐标校正,与波数矢量对齐。
[0108]
首先,将(5)中所述空间谱向量k
x
和k
y
进行变换:
[0109][0110]
其中,a
rot
为旋转矩阵:
[0111][0112]
之后对距离频率域做sinc插值来矫正投影:
[0113][0114]
式中,表示二维傅里叶变换,s(t,f
τ
)表示距离时间域和横向距离频率域的回波匹配滤波数据。回波数据大小为n
r
×
n
c
,插值后数据大小为m
×
l。在处的空间谱,投影后的坐标为:
[0115][0116]
式中,m=1,2,
…
,m,l=1,2,
…
,l,δk
′
x
和δk
′
y
分别表示u和v方向的空间谱采样间隔,(k
′
xc
,k
′
yc
)表示空间谱分布的中心坐标。
[0117]
步骤四:基于广义矩阵束的空间谱外推补偿
[0118]
完成空间谱数据的旋转及投影坐标校正后,空间谱数据被投影至新的k
′
x
‑
k
′
y
坐标系下。将k
′
x
方向的主接收机和从接收机回波数据进行归一化:
[0119][0120]
式中,l1=1,2,
…
,l1,l2=1,2,
…
,l2,且l=l1 l
δ
l2,l
δ
是间隙数据的数量,a
u1
和a
u2
表示信号幅度,n1和n2表示接收机观测到的加性噪声,x
′
u
表示目标在广义带宽合成方向的位置,k
′
δx
表示间隙数据之间的相差。由此得到全极点信号模型为:
[0121][0122]
式中,l=1,2,
…
,l,a
u
表示信号幅度,n(l)表示接收机观测到的加性噪声。
[0123]
由s
′1(p1)和s
′2(p2)分别生成汉克尔矩阵h1和h2,得到如下方程:
[0124]
h1‑
λh2=0
ꢀꢀꢀꢀꢀꢀꢀ
(41)
[0125]
式中,λ为广义特征值。求解方程可以得到对y(p)极点k
′
x
(p)的估计。
[0126]
由估计的u阶极点组成范德蒙矩阵z1,得到如下方程:
[0127][0128]
式中,y=(y(1),
…
,y(l1))
t
表示主接收机回波数据。求解方程可以得到y(l)幅度a
u
的估计。根据估计的极点k
′
x
(l)和幅度a
u
,获得(17)中信号模型y(l)的全极点表示形式,通过该模型可外推出分布式雷达的缺失空间谱。
[0129]
步骤五:目标重建与几何校正
[0130]
根据步骤四中外推得到的完整空间谱,目标散射系数可以表示为:
[0131][0132]
式中,ω
′
表示完整的空间谱分布区域。经过几何校正得到x
‑
y平面上的成像结果:
[0133][0134]
式中,(x,y)和(x
′
,y
′
)分别表示目标在x
‑
y和x
′‑
y
′
平面上的位置坐标。
[0135]
基于上述步骤,获取的空间谱数据在完成投影校正后,空间谱数据如图3(a)所示,通过空间谱数据外推后,空间谱数据采样后的间隙可以被补偿,结果如图3(b)所示。采用传统快速后向投影算法对获取的回波进行投影聚焦时,其成像结果如图4(a)所示,可以看出在空间谱获取数据存在间隙时,其成像结果将产生主瓣分裂问题,无法实现理想聚焦。采用传统的矩阵傅里叶变换方法对空间谱数据进行成像时,其成像结果如图4(b)所示,该方法仍不能够解决空间谱间隙产生主瓣分裂问题。采用本发明方法,其成像结果如图4(c)所示,在该结果中,可以看出,目标主瓣可实现理想聚焦,分布式雷达在空间谱分裂条件下的相参融合,实现了目标的高分辨率聚焦。
[0136]
可以看出,本发明的分布式雷达空间谱相参融合成像方法,利用广义矩阵束方法对空间谱数据进行外推,可以实现空间谱间断条件下的高分辨率成像,提高了分布式雷达的成像性能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。