1.本发明涉及撬装加油站技术领域,尤其涉及一种撬装加油站点的管理方法及系统。
背景技术:
2.橇装加油站也叫橇装式加油装置,是集储油罐、加油机、视频监控为一体的地面可移动加油站。由于其具有可移动性和无人值守的特点,因此多应用于码头和物流园,供物流园和码头的车队统一使用。
3.由于撬装加油站为无人值守加油站点,因此多安装有摄像监测装置,用于检测有无存在人为破坏撬装加油站的行为,由于现有的摄像监测装置大多是对撬装加油站整体环境进行检测,即:摄像监测装置检测的主体环境较为宽泛,只能根据监测视频中的人体活动大致判断有无出现人为损坏撬装加油站的现象。而针对加油过程中因加油人员的误操作导致的加油机故障却没有办法进行监测。
技术实现要素:
4.本发明的目的在于提供一种撬装加油站点的管理方法及系统,通过对加油人员的加油操作进行识别判断,并将存在异常行为的视频进行及时反馈,工作人员通过观看异常视频可以获取加油人员的操作过程,并判断该过程是否会导致加油机故障或导致哪种故障,从而针对故障进行针对性的维修,避免因不知道加油机是哪种故障而反复维修或反复更换维修人员的现象。
5.本发明通过下述技术方案实现:
6.一种撬装加油站点的管理方法,包括以下步骤:
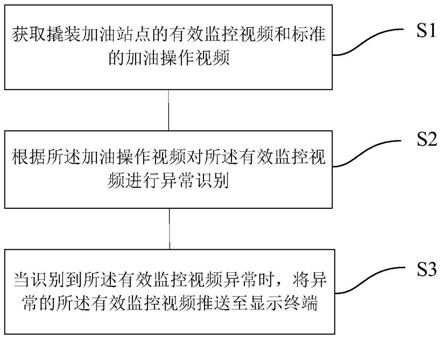
7.s1:获取撬装加油站点的有效监控视频和标准的加油操作视频;所述有效监控视频为:有外来事物存在于所述撬装加油站点的监控视频;
8.s2:根据所述加油操作视频对所述有效监控视频进行异常识别;
9.s3:当识别到所述有效监控视频异常时,将异常的所述有效监控视频推送至显示终端。
10.由于撬装加油站为无人值守加油站点,因此多安装有摄像监测装置,用于检测有无存在人为破坏撬装加油站的行为,由于现有的摄像监测装置大多是对撬装加油站整体环境进行检测,即:摄像监测装置检测的主体环境较为宽泛,只能根据监测视频中的人体活动大致判断有无出现人为损坏撬装加油站的现象。而针对加油过程中因加油人员的误操作导致的加油机故障却没有办法进行监测。基于此,在本方案中,通过获取撬装加油站有效的监控视频并与标准的加油操作视频进行对比识别,可以识别出在撬装加油站存在异常行为(加油操作不正确)的视频,并将存在异常行为的视频推送至显示终端供工作人员观看。相比于现有的技术方案,本技术的技术方案可以对加油人员的加油操作进行识别判断,并将存在异常行为的视频进行及时反馈,工作人员通过观看异常视频可以获取加油人员的操作
过程,并判断该过程是否会导致加油机故障或导致哪种故障,从而针对故障进行针对性的维修,避免因不知道加油机是哪种故障而反复维修或反复更换维修人员的现象。
11.优选地,所述s1包括以下子步骤:
12.s11:读取所述撬装加油站点完整的监控视频;
13.s12:从所述监控视频的监控起点开始,每间隔时间周期t获取所述监控视频对应的图像,并对所述图像进行灰度处理,得到灰度直方图;
14.s13:以阈值t为分界点,将所述灰度直方图分割为第一部分和第二部分;
15.s14:计算所述第一部分的面积与所述第二部分的面积的差值;
16.d=|s1‑
s2|;
17.其中,d表示差值,s1表示第一部分的面积,s2表示第二部分的面积;
18.s15:当检测到所述差值大于或小于阈值差值时,将所述图像对应的监控视频标记为有效监控视频。
19.优选地,所述s2包括以下子步骤:
20.s21:获取第一视频帧和第二视频帧;所述第一视频帧为所述有效监控视频的视频帧,所述第二视频帧为所述加油操作视频的视频帧;
21.s22:提取所述第一视频帧的特征点和特征点总数,以及所述第二视频帧的特征点和特征点总数;
22.s23:将第i个所述第一视频帧的特征点依次与所有的所述第二视频帧的特征点进行匹配,以得到第i个所述第一视频帧分别与第y个所述第二视频帧相匹配的特征点数;i=1、2、3
…
;y=1、2、3
…
;
23.s24:当第i个所述第一视频帧与第y个所述第二视频帧存在相匹配的特征点时,根据第i个所述第一视频帧的特征点总数、第y个所述第二视频帧的特征点总数以及相匹配的特征点总数计算第i个所述第一视频帧与第y个所述第二视频帧的相似度;
24.s25:重复步骤s21
‑
s24,直至所有的所述第一视频帧均与所有的所述第二视频帧进行相似度识别;
25.s26:获取相似度均值,当所述相似度均值小于预设相似度时,将所述有效监控视频标记为异常。
26.优选地,所述相似度由下式获取:
[0027][0028]
其中,r表示相似度,n表示相匹配的特征点总数,n1表示所述第一视频帧的特征点总数,n2表示所述第二视频帧的特征点总数。
[0029]
一种撬装加油站点的管理系统,包括获取模块、识别模块以及推送模块;
[0030]
所述获取模块,用于获取撬装加油站点的有效监控视频和标准的加油操作视频;所述有效监控视频为:有外来事物存在于所述撬装加油站点的监控视频;
[0031]
所述识别模块,用于根据所述加油操作视频对所述有效监控视频进行异常识别;
[0032]
所述推送模块,用于当所述识别模块识别到异常的所述有效监控视频时,将异常的所述有效监控视频推送至显示终端。
[0033]
优选地,所述获取模块包括读取单元、处理单元、分割单元、计算单元以及标记单
元:
[0034]
所述读取单元,用于读取所述撬装加油站点完整的监控视频;
[0035]
所述处理单元,用于从所述监控视频的监控起点开始,每间隔时间周期t获取所述监控视频对应的图像,并对所述图像进行灰度处理,得到灰度直方图;
[0036]
所述分割单元,用于以阈值t为分界点,将所述灰度直方图分割为第一部分和第二部分;
[0037]
所述计算单元,用于计算所述第一部分的面积与所述第二部分的面积的差值;
[0038]
d=|s1‑
s2|;
[0039]
其中,d表示差值,s1表示第一部分的面积,s2表示第二部分的面积;
[0040]
所述标记单元,用于当检测到所述差值大于或小于阈值差值时,将所述图像对应的监控视频标记为有效监控视频。
[0041]
优选地,所述识别模块包括获取单元、提取单元、匹配单元、第一计算单元以及第二计算单元;
[0042]
所述获取单元,用于获取第一视频帧和第二视频帧;所述第一视频帧为所述有效监控视频的视频帧,所述第二视频帧为所述加油操作视频的视频帧;
[0043]
所述提取单元,用于提取所述第一视频帧的特征点和特征点总数,以及所述第二视频帧的特征点和特征点总数;
[0044]
所述匹配单元,用于将第i个所述第一视频帧的特征点依次与所有的所述第二视频帧的特征点进行匹配,以得到第i个所述第一视频帧分别与第y个所述第二视频帧相匹配的特征点数;i=1、2、3
…
;y=1、2、3
…
;
[0045]
所述第一计算单元,用于当第i个所述第一视频帧与第y个所述第二视频帧存在相匹配的特征点时,根据第i个所述第一视频帧的特征点总数、第y个所述第二视频帧的特征点总数以及相匹配的特征点总数计算第i个所述第一视频帧与第y个所述第二视频帧的相似度;
[0046]
所述第二计算单元,用于当所有的所述第一视频帧均与所有的所述第二视频帧进行相似度识别后,计算相似度均值,当所述相似度均值小于预设相似度时,将所述有效监控视频标记为异常。
[0047]
优选地,所述相似度由下式获取:
[0048][0049]
其中,r表示相似度,n表示相匹配的特征点总数,n1表示所述第一视频帧的特征点总数,n2表示所述第二视频帧的特征点总数。
[0050]
本发明与现有技术相比,具有如下的优点和有益效果:
[0051]
1、通过对加油人员的加油操作进行识别判断,并将存在异常行为的视频进行及时反馈,工作人员通过观看异常视频可以获取加油人员的操作过程,并判断该过程是否会导致加油机故障或导致哪种故障,从而针对故障进行针对性的维修,避免因不知道加油机是哪种故障而反复维修或反复更换维修人员的现象;
[0052]
2、通过对监控装置获取的监控视频进行筛选,从大量的监控视频中筛选出有人员在撬装加油站的监控视频,过滤掉无外来事物存在于撬装加油站点的监控视频,从而减少
对监控视频的异常识别处理过程。
附图说明
[0053]
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:
[0054]
图1为本发明的流程示意图。
具体实施方式
[0055]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
[0056]
实施例1
[0057]
本实施例提供了一种撬装加油站点的管理方法,如图1所示,包括以下步骤:
[0058]
s1:获取撬装加油站点的有效监控视频和标准的加油操作视频;有效监控视频为:有外来事物存在于撬装加油站点的监控视频;
[0059]
监控装置在对撬装加油站进行监控时,其获取的是很长一段时间内的监控视频,在这一段时间内存在外来车辆进行加油的情况,也存在无外来车辆或外来人员到撬装加油站的情况,因此,为了减少对监控视频的异常识别处理过程,本实施例对监控装置获取的监控视频进行了筛选,从大量的监控视频中筛选出有人员在撬装加油站的监控视频,过滤掉无外来事物存在于撬装加油站点的监控视频。具体地,包括以下步骤:
[0060]
s11:读取撬装加油站点完整的监控视频;
[0061]
s12:从监控视频的监控起点开始,每间隔时间周期t获取监控视频对应的图像,并对图像进行灰度处理,得到灰度直方图;
[0062]
s13:以阈值t为分界点,将灰度直方图分割为第一部分和第二部分;
[0063]
其中,阈值t由无外来事物存在于撬装加油站点的监控视频进行获取,具体地,包括:
[0064]
获取无外来事物存在于撬装加油站点的监控视频对应的图片a;
[0065]
对图片a进行灰度处理,从而获取图片a的灰度直方图a,进而获取图片a的二值化阈值,将图片a的二值化阈值作为阈值t;
[0066]
其中,值得说明的是,阈值t可以随着时间更新,随着时间更新的方式可以以历史数据为依据,用对应时刻的历史阈值作为当前时刻的阈值,也可以是通过构建模型进行预测等。
[0067]
s14:计算第一部分的面积与第二部分的面积的差值;
[0068]
d=|s1‑
s2|;
[0069]
s1=n∑
i≤t
v
i
;
[0070]
s2=n∑
i>t
v
i
;
[0071]
其中,d表示差值,s1表示第一部分的面积,s2表示第二部分的面积,n为图像的像素总数,v
i
是图像灰度级为i的像素出现的概率;
[0072]
s15:当检测到差值大于或小于阈值差值时,将图像对应的监控视频标记为有效监
控视频。
[0073]
其中,阈值差值为灰度直方图a以阈值t为分界点划分成两部分的面积的差值。
[0074]
一幅图像对应唯一的灰度直方图,不同的图像可对应相同的灰度直方图。因此,当撬装加油站不存在外来事物时,每间隔时间周期t获取的监控视频对应的图像的灰度直方图应当一致,当有外来事物出现在摄像装置的摄像范围时,此时的灰度直方图会存在变化;且由于灰度直方图反映的是一幅图像中各灰度级像素出现的频率之间的关系,因此当外来事物出现在撬装加油站点时,由于灰度级和像素众多,灰度直方图的变化效果不明显,基于此,在本方案中,以阈值t为分界点将灰度直方图分成两部分,当外来事物出现在撬装加油站点时,两部分的面积会存在变化,因此,在本方案中,通过求取两部分的差值来反应灰度直方图的变化,进而能够准确的判断有无人员进入到撬装加油站。
[0075]
s2:根据加油操作视频对有效监控视频进行异常识别;
[0076]
具体地,包括以下步骤:
[0077]
s21:获取第一视频帧和第二视频帧;第一视频帧为有效监控视频的视频帧,第二视频帧为加油操作视频的视频帧;
[0078]
s22:提取第一视频帧的特征点和特征点总数,以及第二视频帧的特征点和特征点总数;
[0079]
s23:将第i个第一视频帧的特征点依次与所有的第二视频帧的特征点进行匹配,以得到第i个第一视频帧分别与第y个第二视频帧相匹配的特征点数;i=1、2、3
…
;y=1、2、3
…
;
[0080]
s24:当第i个第一视频帧与第y个第二视频帧存在相匹配的特征点时,根据第i个第一视频帧的特征点总数、第y个第二视频帧的特征点总数以及相匹配的特征点总数计算第i个第一视频帧与第y个第二视频帧的相似度;
[0081]
s25:重复步骤s21
‑
s24,直至所有的第一视频帧均与所有的第二视频帧进行相似度识别;
[0082]
s26:获取相似度均值,当相似度均值小于预设相似度时,将有效监控视频标记为异常;其中,相似度由下式获取:
[0083][0084]
其中,r表示相似度,n表示相匹配的特征点总数,n1表示所述第一视频帧的特征点总数,n2表示所述第二视频帧的特征点总数。
[0085]
s3:当识别到有效监控视频异常时,将异常的有效监控视频推送至显示终端。
[0086]
由于撬装加油站为无人值守加油站点,因此多安装有摄像监测装置,用于检测有无存在人为破坏撬装加油站的行为,由于现有的摄像监测装置大多是对撬装加油站整体环境进行检测,即:摄像监测装置检测的主体环境较为宽泛,只能根据监测视频中的人体活动大致判断有无出现人为损坏撬装加油站的现象。而针对加油过程中因加油人员的误操作导致的加油机故障却没有办法进行监测。基于此,在本方案中,通过获取撬装加油站有效的监控视频并与标准的加油操作视频进行对比识别,可以识别出在撬装加油站存在异常行为(加油操作不正确)的视频,并将存在异常行为的视频推送至显示终端供工作人员观看。相比于现有的技术方案,本技术的技术方案可以对加油人员的加油操作进行识别判断,并将
存在异常行为的视频进行及时反馈,工作人员通过观看异常视频可以获取加油人员的操作过程,并判断该过程是否会导致加油机故障或导致哪种故障,从而针对故障进行针对性的维修,避免因不知道加油机是哪种故障而反复维修或反复更换维修人员的现象。
[0087]
实施例2
[0088]
本实施例提供了一种撬装加油站点的管理系统,包括获取模块、识别模块以及推送模块;
[0089]
获取模块,用于获取撬装加油站点的有效监控视频和标准的加油操作视频;有效监控视频为:有外来事物存在于撬装加油站点的监控视频;
[0090]
识别模块,用于根据加油操作视频对有效监控视频进行异常识别;
[0091]
推送模块,用于当识别模块识别到异常的有效监控视频时,将异常的有效监控视频推送至显示终端。
[0092]
由于撬装加油站为无人值守加油站点,因此多安装有摄像监测装置,用于检测有无存在人为破坏撬装加油站的行为,由于现有的摄像监测装置大多是对撬装加油站整体环境进行检测,即:摄像监测装置检测的主体环境较为宽泛,只能根据监测视频中的人体活动大致判断有无出现人为损坏撬装加油站的现象。而针对加油过程中因加油人员的误操作导致的加油机故障却没有办法进行监测。基于此,在本方案中,通过获取撬装加油站有效的监控视频并与标准的加油操作视频进行对比识别,可以识别出在撬装加油站存在异常行为(加油操作不正确)的视频,并将存在异常行为的视频推送至显示终端供工作人员观看。相比于现有的技术方案,本技术的技术方案可以对加油人员的加油操作进行识别判断,并将存在异常行为的视频进行及时反馈,工作人员通过观看异常视频可以获取加油人员的操作过程,并判断该过程是否会导致加油机故障或导致哪种故障,从而针对故障进行针对性的维修,避免因不知道加油机是哪种故障而反复维修或反复更换维修人员的现象。
[0093]
具体地,本实施例中的获取模块包括读取单元、处理单元、分割单元、计算单元以及标记单元:
[0094]
读取单元,用于读取撬装加油站点完整的监控视频;
[0095]
处理单元,用于从监控视频的监控起点开始,每间隔时间周期t获取监控视频对应的图像,并对图像进行灰度处理,得到灰度直方图;
[0096]
分割单元,用于以阈值t为分界点,将灰度直方图分割为第一部分和第二部分;
[0097]
计算单元,用于计算第一部分的面积与第二部分的面积的差值;
[0098]
d=|s1‑
s2|;
[0099]
其中,d表示差值,s1表示第一部分的面积,s2表示第二部分的面积;
[0100]
标记单元,用于当检测到差值大于或小于阈值差值时,将图像对应的监控视频标记为有效监控视频。
[0101]
识别模块包括获取单元、提取单元、匹配单元、第一计算单元以及第二计算单元;
[0102]
获取单元,用于获取第一视频帧和第二视频帧;第一视频帧为有效监控视频的视频帧,第二视频帧为加油操作视频的视频帧;
[0103]
提取单元,用于提取第一视频帧的特征点和特征点总数,以及第二视频帧的特征点和特征点总数;
[0104]
匹配单元,用于将第i个第一视频帧的特征点依次与所有的第二视频帧的特征点
进行匹配,以得到第i个第一视频帧分别与第y个第二视频帧相匹配的特征点数;i=1、2、3
…
;y=1、2、3
…
;
[0105]
第一计算单元,用于当第i个第一视频帧与第y个第二视频帧存在相匹配的特征点时,根据第i个第一视频帧的特征点总数、第y个第二视频帧的特征点总数以及相匹配的特征点总数计算第i个第一视频帧与第y个第二视频帧的相似度;
[0106]
第二计算单元,用于当所有的第一视频帧均与所有的第二视频帧进行相似度识别后,计算相似度均值,当相似度均值小于预设相似度时,将有效监控视频标记为异常。
[0107]
其中,相似度由下式获取:
[0108][0109]
其中,r表示相似度,n表示相匹配的特征点总数,n1表示第一视频帧的特征点总数,n2表示第二视频帧的特征点总数。
[0110]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。