1.本发明涉及一种传递窗,特别涉及一种物品传递通道。
背景技术:
2.传递窗,以方便实验所需要的物品通过传递窗进入工作室,从而确保实验操作过程不会污染实验室环境。生物实验室和动物饲养室,不同隔离区域之间传递物品时,需要通过传递窗进行物品的传递。现阶段,传统的单门电动升降传递窗传递物品,单门操作,无法对污物和净物进行区分,污染区域的带有病菌的空气会进入洁净区域,造成空气质量不合格,影响消毒物品的质量,容易造成物品的二次污染。而且现有技术的上开门双门电动升降传递窗,在进行操作时,很容易夹伤工作人员或夹坏物品,存在安全隐患。传递窗是一种洁净室的辅助设备,主要用于洁净区与洁净区之间、洁净区与非洁净区之间小件物品的传递,以减少洁净室的开门次数,把对洁净室的污染降低到最低程度。随着科技的发展,传递窗被广泛应用于电子、光学、生物制药及食品等需要空气净化的场所。现有的传递窗主要采用左右平移式门体、合页式门体或快速卷帘门式门体。而这些传递窗多少存在一些问题:传递窗的结构对安装空间有要求,门体开关不方便,价格昂贵、成本高。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种物品传递通道,能够保证两区域之间的密封性,避免交叉感染。
4.为了实现上述目的,本发明采用以下技术方案:
5.一种物品传递通道,所述物品传递通道设置于墙体内;所述墙体的两侧设有与所述物品传递通道连通的传递口,所述传递口上设有伸缩门;所述物品传递通道包括传递腔体及连接在所述传递腔体两端的弹性连接部,所述弹性连接部可与相对应的所述伸缩门密封连接。
6.所述弹性连接部包括伸缩管、导向机构、动密封板、电磁铁及固定密封板,其中伸缩管的两端分别与动密封板和固定密封板连接,所述固定密封板与传递腔体连接;所述电磁铁嵌设于所述动密封板上,所述导向机构设置于所述传递腔体上,并且与所述动密封板连接;所述电磁铁通电后可与所述伸缩门吸合,从而使动密封板与所述伸缩门密封连接。
7.所述导向机构包括伸缩杆、伸缩支座及复位弹簧,其中伸缩支座设置于所述传递腔体上,所述伸缩杆与所述伸缩支座滑动连接,并且所述伸缩杆的一端与所述动密封板连接,另一端设有限位凸台;所述复位弹簧套设于所述伸缩杆的另一端,并且两端分别与所述限位凸台和所述伸缩支座抵接。
8.所述伸缩门包括门框、封闭门及电动伸缩杆,其中门框设置于所述传递口上,所述门框的两侧设有滑道;所述封闭门的两侧通过滑轮与所述滑道滑动连接;所述电动伸缩杆设置于所述传递腔体的下方,并且输出端与所述封闭门连接,所述电动伸缩杆用于驱动所述封闭门沿所述滑道上下移动。
9.所述墙体内设有容纳腔,所述电动伸缩杆设置于所述容纳腔内。
10.所述墙体的两侧为具有压差的密封环境,两个所述伸缩门上分别设有单向阀,所述单向阀用于平衡所述传递腔体与所述墙体两侧密封环境的压差。
11.在所述弹性连接部与所述伸缩门解除密封连接时,所述单向阀在伸缩门两侧存在的压差作用下开启。
12.所述传递腔体内设有紫外线杀菌灯和照明灯。
13.所述传递腔体内设有用于定位笼具的定位机构和笼具在位传感器;所述定位机构包括笼具长度定位块和笼具宽度定位块,其中笼具宽度定位块设置于笼具长度定位块的两侧。
14.所述伸缩门上设有透明观察玻璃。
15.本发明的优点及有益效果是:
16.本发明能够保证两区域之间的密封性,避免交叉感染且带有双重保护装置,操作更安全。
17.本发明结构简单合理、操作方便、成本低。
18.本发明按键式操作,电动升降,传递快捷,效率高,适合机器人自动取放;符合人机工程学,有信息追溯系统,便于大数据、可视化、云计算;
19.本发明能用于不同洁净区,含有压差情况使用;操作简单便于人机互动,模块化便于维护和保养。
20.本发明含有生物附件,如紫外线灭菌灯,便于生物医疗行业。
附图说明
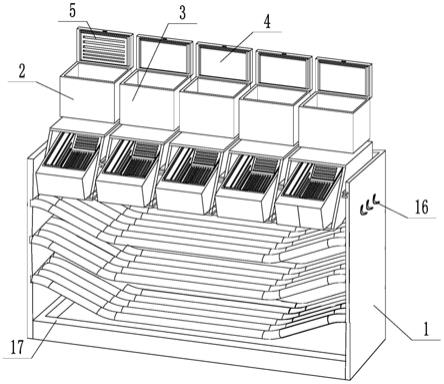
21.图1为本发明物品传递通道的轴测图;
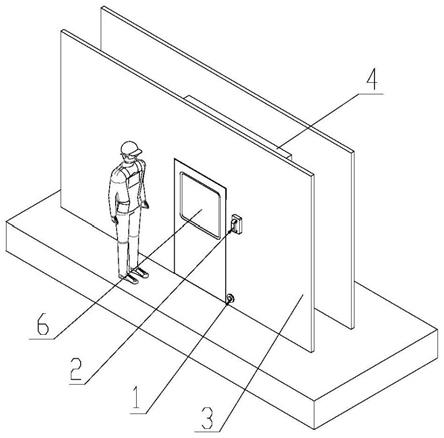
22.图2为本发明物品传递通道的主视图;
23.图3为图2的a-a剖视图;
24.图4为图3中ⅰ处放大图;
25.图5为图4中ⅱ处放大图;
26.图6为图2中d-d剖视图;
27.图7为图2中e-e剖视图;
28.图8为图7中ⅲ处放大图;
29.图9为图2的俯视图;
30.图10为图9的c-c剖视图;
31.图11为本发明中舱体内部定位结构示意图;
32.图12为本发明中伸缩门上单向阀的结构示意图。
33.图中:1为脚踢开关,2为对讲机,3为墙体,4为传递腔体,5为伸缩波纹管,6为伸缩门,7为透明观察玻璃,8为门框,9为触碰传感器,10为紫外线杀菌灯,11为照明灯,12为电动伸缩杆,13为滑轮,14为滑道,15为实验侧单向阀,16为电缆真空密封穿墙插头,17为饲养侧单向阀,18为笼具, 19为笼具长度定位块,20为笼具在位传感器,21为笼具宽度定位块,23为动密封板,24为电磁铁,26为固定密封板,27为伸缩杆,28为伸缩支座, 29为复位弹簧,30为密封球,31为单向弹簧,32为连通通道。
具体实施方式
34.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
35.如图1-4所示,本发明提供的一种物品传递通道,物品传递通道设置于墙体3内;墙体3的两侧设有与物品传递通道连通的传递口,传递口上设有伸缩门6;物品传递通道包括传递腔体4及连接在传递腔体4两端的弹性连接部,弹性连接部可与相对应的伸缩门6密封连接。
36.如图7-8所示,本发明的实施例中,弹性连接部包括伸缩管、导向机构、动密封板23、电磁铁24及固定密封板26,其中伸缩管的两端分别与动密封板23和固定密封板26连接,固定密封板26与传递腔体4连接;电磁铁24 嵌设于动密封板23上,导向机构设置于传递腔体4上,并且与动密封板23 连接;电磁铁24通电后可与伸缩门6吸合,从而使动密封板23与伸缩门6 密封连接。
37.具体地,导向机构包括伸缩杆27、伸缩支座28及复位弹簧29,其中伸缩支座28设置于传递腔体4的内表面,伸缩杆27与伸缩支座28滑动连接,并且伸缩杆27的一端与动密封板23连接,另一端设有限位凸台;复位弹簧 29套设于伸缩杆27的另一端,并且两端分别与限位凸台和伸缩支座28抵接。
38.本发明的实施例中,伸缩管可采用伸缩波纹管5或柔性风琴结构管。
39.如图4、图9-10所示,伸缩门6包括门框8、封闭门及电动伸缩杆12,其中门框8设置于传递口上,门框8的两侧设有滑道14;封闭门的两侧通过滑轮13与滑道14滑动连接;电动伸缩杆12设置于传递腔体4的下方,并且输出端与封闭门连接,电动伸缩杆12用于驱动封闭门沿滑道14上下移动。
40.进一步地,伸缩门6上设有透明观察玻璃7。墙体3内设有容纳腔,电动伸缩杆12设置于容纳腔内。
41.如图6所示,墙体3的两侧为具有压差的密封环境,两个伸缩门6上分别设有单向阀,在弹性连接部与伸缩门6解除密封连接时,单向阀在伸缩门6 两侧压差的作用下开启,单向阀用于平衡传递腔体4与墙体3的两侧密封环境的压差,使伸缩管在电磁铁24失电的情况下能快速缩回复位,进而加快开门节拍。
42.如图12所示,单向阀设置于伸缩门6上设有的连通通道32内;单向阀包括密封球30和单向弹簧31,连通通道32为阶梯孔,密封球30容置于阶梯孔内,单向弹簧31的一端与密封球30抵接,另一端与连通通道32的内壁连接,密封球30通过单向弹簧31的压力作用下封闭连通通道32。当电磁铁24 失电后动密封板23与伸缩门6脱离的瞬间,密封球30会在两侧压差的作用下克服单向弹簧31的弹力向上运动,开启连通通道32,使传递腔体4与外部环境连通平衡内外压差,从而使伸缩管快速复位。
43.进一步地,如图4所示,传递腔体4内设有紫外线杀菌灯10和照明灯11,紫外线杀菌灯10为多个且设置于传递腔体4的底部,能达到在不传递笼具18 的情况下进行内部灭菌工作。照明灯11设置于传递腔体4的顶部,便于传递腔体4内部的照明。
44.如图4-5、图11所示,本发明的实施例中,传递腔体4内设有用于定位笼具18的定位机构和笼具在位传感器20。定位机构包括笼具长度定位块19 和笼具宽度定位块21,其中笼具宽度定位块21设置于笼具长度定位块19的两侧。笼具18在笼具长度定位机构19和笼具宽
度定位机构20的导向和圆角定位于传递腔体4的内部,笼具在位传感器21能检测人工和机器人放置的笼具18是否在位。笼具18含有条形码或者二位码,能与扫码枪等数据传送采用网络技术,能进行信息追溯,便于大数据的管理、大数据分析,可视化统计分析。
45.如图3所示,本发明的实施例中,墙体3的一侧为实验室,另一侧为物饲饲养室;实验室内的压力为p0,物饲饲养室内的压力为p1,即实验室和动物饲养室之间具有一定压差,具体为10pa到20pa。传递腔体4的中部与密封墙体3静密封固定且连接,传递腔体4的内部含有紫外线杀菌灯10,外线杀菌灯10能对内部空间进行紫外线杀菌。传递腔体4的内部还含有照明灯11,照明灯11能对内部空间进行需要时间照明,传递腔体4的中部含有电缆真空密封穿墙插头16,可以在传递腔体4内部外部保证密封的情况下,进行外部和内部的融入电信号和供电。伸缩门6的外部设有触碰传感器9,可以防止误动作夹手或者传递物品。电动伸缩杆12的一端连接地面,电动伸缩杆12的另外一端连接伸缩门6,电动伸缩杆12可以控制伸缩门6在墙平面上下运动。位于实验室一侧的伸缩门6上装置有实验侧单向阀15,位于动物饲养室一侧的伸缩门6上设有饲养侧单向阀17,可在伸缩门6上下运动前,伸缩波纹管 5的一端与伸缩门6解除密封连接后在建立压差情况下,自动平衡传递腔体4 的内外部压差,即平衡传递腔体4的内部压力p2与实验室内压力p0、物饲饲养室内压力p1之间的脉动压差,使伸缩波纹管5或柔性风琴结构管顺利收缩复位。传递腔体4两侧的伸缩门6含有软件互锁,保证两侧不能同时开门。实验侧单向阀15和饲养侧单向阀17能减少传递腔体4的内部压力p2与实验室内压力p0、物饲饲养室内压力p1之间的脉动压差,能加快开门节拍。
46.传递腔体4还设有压差表和密封气密检测口,便于后期检修和维护。在墙体3位于实验室一侧的侧壁上设有脚踢开关1和对讲机2,如图1所示。
47.本发明提供的物品传递通道,具体工作流程如下:
48.1)工业机器人发送信号,请求开门;
49.2)动物饲养室侧的伸缩波纹管5内的电磁铁24解除密封吸力,伸缩波纹管5在内部复位弹簧29的弹力和伸缩杆27的作用下,伸缩波纹管5与伸缩门6解除接触密封,同时饲养侧单向阀17在压差的作用下开启,使传递腔体4和动物饲养室连通,解除压差;
50.3)动物饲养室侧的伸缩门6在电动伸缩杆12的驱动下向上运动,从而开启伸缩门6,让传递腔体4与动物饲养室连通;
51.4)动物饲养室内的机器人将笼具18从动物饲养室的笼架或者缓存,逐个的转运至传递腔体4内部机械定位上,并同时确认笼具18到位信号;
52.5)伸缩门6在电动伸缩杆12的驱动下向下运动,进行复位,让传递腔体4与动物饲养室机械封闭;
53.6)动物饲养室侧的伸缩波纹管5内的电磁铁24产生密封吸力,伸缩波纹管5克服复位弹簧5的作用下,伸缩波纹管5与伸缩门6产生接触静密封,同时饲养侧单向阀17关闭,完成传递腔体4与动物饲养室的气密封闭;
54.7)人工踢脚踢开关1,控制系统判断,实验室侧的伸缩门6和动物饲养室侧的伸缩门6软件逻辑互锁;
55.8)实验室侧的伸缩波纹管5内的电磁铁24解除密封吸力,伸缩波纹管5 在内部复位弹簧29的弹力和伸缩杆27的作用下,伸缩波纹管5与伸缩门6 解除接触密封,同时实验侧单向阀15打开,连通传递腔体4和实验室,解除压差;
56.9)实验室侧伸缩门6在电动伸缩杆12的驱动下向上运动,开启实验室侧的伸缩门6,让传递腔体4与实验室侧连通;
57.10)实验室侧的实验员将笼具18从传递腔体4内部机械定位上,逐个的转运至实验室侧的缓存台上,并同时确认笼具18离位信号;
58.11)实验室侧伸缩门6在电动伸缩杆12的驱动下向下运动,进行复位,让传递腔体4与实验室机械封闭;
59.12)实验室侧的伸缩波纹管5内的电磁铁24产生密封吸力,伸缩波纹管 5克服复位弹簧29的作用下,伸缩波纹管5与伸缩门6产生接触静密封,同时实验侧单向阀15关闭,完成传递腔体4与实验室的气密封闭;
60.13)实验室侧的实验员进行信息匹配,含有条形码或者二位码,能与扫码枪等数据传送采用网络技术,能进行信息追溯,便于大数据的管理、大数据分析,可视化统计分析。
61.本发明能够保证两区域之间的密封性,避免交叉感染且带有双重保护装置,操作更安全;能用于不同洁净区,含有压差情况使用;操作简单便于人机互动,模块化便于维护和保养。
62.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。