1.本实用新型涉及自动化设备,具体是一种电池和电路板的安装线。
背景技术:
2.常规的电池和电路板是通过人工的方式进行组装,且在电池和电路板的组装过程中,电池需要和电路板分别进行扫码配对,才能进行下一步的安装;且常规的不匹配的电池和电路板均是通过人工的方式进行收集,耗时耗力。
3.综上,如何实现电池和电路板自动化安装成为了本公司研究人员急需解决的问题。
技术实现要素:
4.本实用新型要解决的技术问题是:如何实现电池和电路板自动化安装;
5.为了解决上述技术问题,本实用新型采用如下技术方案:
6.本实用新型是一种电池和电路板的安装线,第一运输线,其适于载具;第二运输线,其平行与第一运输线,并适于运输电路板或人工安装完成的载具与电路板;第一扫码机构,其固定在第二运输线的上方,并适于对完成安装的电路板进行扫码;电池上料机构,其上放置有电池;第二扫码机构,其适于对电池进行扫码;第二料盘,其适于放置与电路板匹配失败的电池;第三运输线,其适于放置与电池匹配失败的电路板;机械手,其适于抓取上料完成后的电池抓取至第二扫码机构进行扫码匹配,若与电路板匹配成功,将电池安装至载具上;若匹配失败,将电池放置在第二料盘上以及将载具连同电路板放置在第三运输线上;搬运机构,其设置在第二运输线末端,并横跨第二运输线、第一运输线,其适于抓取位于第二运输线上的载具连同电路板运输至第一运输线上进行出料;
7.在本方案中,第一运输线负责运输载具,第二运输线负责运输电路板,人工将电路板安装在载具上后,将电路板、载具置于第二运输线上,第一扫码机构对电路板进行扫码;
8.同时,机械手抓取完成上料的电池在第二扫码机构上进行扫码;
9.此时若电路板、电池相匹配,机械手抓取电池安装在载具上,载具、电池、电路板跟随第二运输线运输至其末端,由搬运机构将载具、电池、电路板一起放置在第一运输线上进行出料。
10.若电路板、电池不匹配,机械手抓取电池运送至第二料盘的同时抓取载具、电路板运输至第三运输线上。
11.为了说明电池上料机构的具体结构,本实用新型采用电池上料机构包括:框架;电池料盘,其上放置有多个电池,其堆叠置于框架内;第一料盘输送线,其位于框架底部;顶紧气缸,其固定在框架底部侧边,并作用与电池料盘侧边,控制堆叠料盘依次落入至第一料盘输送线上;第二料盘输送线,其位于第一料盘输送线一侧,置于第一料盘输送线上的电池料盘会运送至第二料盘输送线上;夹紧机构,其位于第二料盘输送线侧边,其适于将电池料盘固定在第二料盘输送线上;第二料盘输送线包括两运输带,两运输带通过直线组件相互靠
近或远离;升降平台,其位于第二料盘输送线底部;当机械手抓取位于第二料盘输送线上电池料盘的电池结束后,直线组件驱动两运输带远离,两电池料盘置于升降平台上进行料盘的出料;
12.在本方案中,电池放置在电池料盘中,电池料盘堆叠置于框架内,通过顶紧气缸的工作,依次将电池料盘置于第一料盘输送线上,第一料盘输送线上运带动电池料盘运动至第二料盘输送线上,随后通过夹紧机构将电池料盘固定在第二输送线上,供机械手抓取;当电池料盘上的电池被机械手抓取完成后,直线组件驱动两运输带远离,两电池料盘置于升降平台上进行料盘的出料。
13.为了说明升降平台的具体结构,本实用新型采用升降平台包括:支架;丝杆,其竖直且转动设置在支架上,并通过电机带动丝杆转动;置物台,其水平设置,并与丝杆通过螺纹连接;
14.完成抓取电池的空电池料盘或落入至置物台上,置物台由于丝杆的转动实现升降,也就是说,随着空电池料盘数量的增加,置物台会越来越向下移动。
15.为了说明搬运机构具体结构,本实用新型采用搬运机构包括:机架,其横跨所述第二运输线、第一运输线;直线模组,其适于沿所述机架长度方向运动;升降模组,其与所述直线模组的活动端连接,并相对与所述机架做升降运动;抓手,其与所述升降模组的活动端连接,并适于抓取所述载具;
16.在本方案中,抓手由于直线模组、升降模组的连接实现相对于机架的两轴运动,从而能够将位于第二运输线夹取运输至第二运输线上。
17.为了说明机械手的具体结构,本实用新型采用机械手包括:旋转体,其转动位于机械手端部;第一电池抓手,其升降固定在旋转体上;第二电池抓手,其升降固定在旋转体上,并与第一电池抓手呈对称设置;气动吸盘,其固定在旋转体上,并适于吸附载具;
18.也就是说,机械手能够实现一载具,两电池的同时抓取,提高了工作效率。
19.本实用新型的有益效果:本实用新型是一种电池和电路板的安装线,第一运输线负责运输载具,第二运输线负责运输电路板,人工将电路板安装在载具上后,将电路板、载具置于第二运输线上,第一扫码机构对电路板进行扫码;同时,机械手抓取完成上料的电池在第二扫码机构上进行扫码;此时若电路板、电池相匹配,机械手抓取电池安装在载具上,载具、电池、电路板跟随第二运输线运输至其末端,由搬运机构将载具、电池、电路板一起放置在第一运输线上进行出料;若电路板、电池不匹配,机械手抓取电池运送至第二料盘的同时抓取载具、电路板运输至第三运输线上,综上实现了电池和电路板自动化安装。
附图说明
20.下面结合附图和实施例对本实用新型进一步说明。
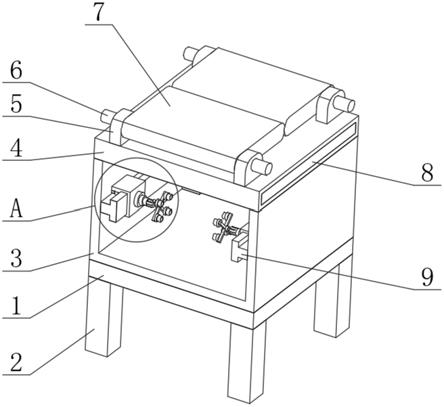
21.图1是本实用新型的结构示意图;
22.图2是本实用新型上料机构的部分结构示意图;
23.图3是本实用新型上料机构的部分结构示意图;
24.图4是本实用新型搬运机构的结构示意图;
25.图5是本实用新型机械手的部分结构示意图。
具体实施方式
26.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
27.如图1所示,本实用新型是一种电池和电路板的安装线,第一运输线1,其适于载具2;第二运输线3,其平行与第一运输线1,并适于运输电路板4或人工安装完成的载具2与电路板4;第一扫码机构5,其固定在第二运输线3的上方,并适于对完成安装的电路板4进行扫码;电池上料机构,其上放置有电池;第二扫码机构6,其适于对电池进行扫码;第二料盘7,其适于放置与电路板4 匹配失败的电池;第三运输线8,其适于放置与电池匹配失败的电路板4;机械手9,其适于抓取上料完成后的电池抓取至第二扫码机构6进行扫码匹配,若与电路板4匹配成功,将电池安装至载具2上;若匹配失败,将电池放置在第二料盘7上以及将载具连同电路板4放置在第三运输线8上;搬运机构10,其设置在第二运输线3末端,并横跨第二运输线3、第一运输线1,其适于抓取位于第二运输线3上的载具2连同电路板4运输至第一运输线1上进行出料;
28.在本方案中,第一运输线负责运输载具,第二运输线负责运输电路板,人工将电路板安装在载具上后,将电路板、载具置于第二运输线上,第一扫码机构对电路板进行扫码;
29.同时,机械手抓取完成上料的电池在第二扫码机构上进行扫码;
30.此时若电路板、电池相匹配,机械手抓取电池安装在载具上,载具、电池、电路板跟随第二运输线运输至其末端,由搬运机构将载具、电池、电路板一起放置在第一运输线上进行出料。
31.若电路板、电池不匹配,机械手抓取电池运送至第二料盘的同时抓取载具、电路板运输至第三运输线上。
32.如图2、3所示,为了说明电池上料机构的具体结构,本实用新型采用电池上料机构包括:框架11;电池料盘12,其上放置有多个电池,其堆叠置于框架 11内;第一料盘输送线13,其位于框架11底部;顶紧气缸14,其固定在框架11底部侧边,并作用与电池料盘12侧边,控制电池料盘12依次落入至第一料盘输送线14上;第二料盘输送线15,其位于第一料盘输送线14一侧,置于第一料盘输送线14上的电池料盘12会运送至第二料盘输送线15上;夹紧机构 16,其位于第二料盘输送线15侧边,其适于将电池料盘12固定在第二料盘输送线15上;第二料盘输送线15包括两运输带17,两运输带17通过直线组件 18相互靠近或远离;升降平台,其位于第二料盘输送线15底部;当机械手9抓取位于第二料盘输送线15上电池料盘12的电池结束后,直线组件驱动两运输带17远离,两电池料盘12置于升降平台上进行电池料盘的出料;
33.在本方案中,电池放置在电池料盘中,电池料盘堆叠置于框架内,通过顶紧气缸的工作,依次将电池料盘置于第一料盘输送线上,第一料盘输送线上运带动电池料盘运动至第二料盘输送线上,随后通过夹紧机构将电池料盘固定在第二输送线上,供机械手抓取;当电池料盘上的电池被机械手抓取完成后,直线组件驱动两运输带远离,两电池料盘置于升降平台上进行料盘的出料。
34.如图3所示,为了说明升降平台的具体结构,本实用新型采用升降平台包括:支架19;丝杆20,其竖直且转动设置在支架19上,并通过电机带动丝杆 20转动;置物台21,其水平设置,并与丝杆20通过螺纹连接;
35.完成抓取电池的空电池料盘或落入至置物台上,置物台由于丝杆的转动实现升降,也就是说,随着空电池料盘数量的增加,置物台会越来越向下移动。
36.如图4所示,为了说明搬运机构具体结构,本实用新型采用搬运机构包括:机架22,其横跨第二运输线3、第一运输线1;直线模组,其适于沿机架22长度方向运动;升降模组,其与直线模组的活动端连接,并相对与机架22做升降运动;抓手23,其与升降模组的活动端连接,并适于抓取载具2;
37.在本方案中,抓手由于直线模组、升降模组的连接实现相对于机架的两轴运动,从而能够将位于第二运输线夹取运输至第二运输线上。
38.如图5所示,为了说明机械手的具体结构,本实用新型采用机械手9包括:旋转体23,其转动位于机械手9端部;第一电池抓手24,其升降固定在旋转体 23上;第二电池抓手25,其升降固定在旋转体23上,并与第一电池抓手24呈对称设置;气动吸盘26,其固定在旋转体23上,并适于吸附载具2;
39.也就是说,机械手能够实现一载具,两电池的同时抓取,提高了工作效率。
40.本实用新型的有益效果:本实用新型是一种电池和电路板的安装线,第一运输线负责运输载具,第二运输线负责运输电路板,人工将电路板安装在载具上后,将电路板、载具置于第二运输线上,第一扫码机构对电路板进行扫码;同时,机械手抓取完成上料的电池在第二扫码机构上进行扫码;此时若电路板、电池相匹配,机械手抓取电池安装在载具上,载具、电池、电路板跟随第二运输线运输至其末端,由搬运机构将载具、电池、电路板一起放置在第一运输线上进行出料;若电路板、电池不匹配,机械手抓取电池运送至第二料盘的同时抓取载具、电路板运输至第三运输线上,综上实现了电池和电路板自动化安装。
41.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。