1.本实用新型涉及镜片领域,尤其是指一种改进型的棱镜安装结构。
背景技术:
2.棱镜,一种由两两相交但彼此均不平行的平面围成的透明物体,用以分光或使光束发生色散。
3.中国发明专利(申请号:201010249883.1,公开号:cn101923203b)披露了一种用于使反射镜相对于图像传感器定位的反射镜安装组件,所述反射镜安装组件包括:用于保持第一反射镜组件的反射镜镜筒;其上安装有图像传感器的反射镜支架;所述反射镜镜筒和所述反射镜支架具有配合连接,这允许沿着光轴移动所述第一反射镜组件,以调整所述图像传感器上的焦点;第二反射镜组件,用来在反射镜使用期间调整所述图像传感器上的焦点;以及其中,在所述第一或第二反射镜组件中的至少一个上设有对准突起,所述对准突起适合于与所述第一或第二反射镜组件中的另一个的一部分进行配合,从而直接光学对准所述第一和第二反射镜组件与所述图像传感器。
技术实现要素:
4.本实用新型提供一种改进型的棱镜安装结构,其主要目的在于克服现有反射镜安装装置在安装反射镜至反射镜筒时,无法精准的将反射镜安装至适当的位置的缺陷。
5.为解决上述技术问题,本实用新型采用如下技术方案:
6.一种改进型的棱镜安装结构,包括一机架、至少一设于所述机架上的升降传动元件、至少一设于所述升降传动元件上的光束感测元件、至少一设于所述光束感测元件下方的工作台、至少一设于所述工作台上的光束产生元件及至少一设于所述光束产生元件上方用于放置安装该棱镜的棱镜筒容置件,所述光束产生元件朝向所述光束感测元件发射一校正光线,所述升降传动元件驱动所述光束感测元件移动至光束产生元件上方接收所述校正光线,所述升降传动元件驱动所述光束感测元件分别沿x轴、y轴及z轴方向移动。
7.进一步的,还包括至少一由所述升降传动元件带动的升降平台、至少一设于所述升降平台朝向光束产生元件方向上的棱镜调整组件,所述棱镜调整组件包括若干个压电致动元件及至少一个棱镜触压元件,所述压电致动元件动能输出端推动所述棱镜触压元件接触该棱镜。
8.进一步的,所述光束产生元件为雷射光源产生器。
9.进一步的,所述光束感测元件为光轴感测器
10.进一步的,所述升降传动元件包括至少一装设在所述机架上的第一行走组件、至少一设于所述第一行走组件上的第二行走组件及至少一设于所述第二行走组件上的第三行走组件,所述第一行走组件带动所述光束感测元件沿y轴方向移动,所述第二行走组件带动所述光束感测元件沿x轴方向移动,所述第三行走组件带动所述光束感测元件沿z轴方向移动。
11.进一步的,所述第一行走组件包括两个分别设于所述工作台左右两侧上可沿y轴方向移动的第一移动单元及至少两个分别设于所述工作台左右两侧上用于安装第一移动单元的第一导轨,所述第二行走组件的左右两端分别装设有至少一所述第一移动单元。
12.进一步的,第二行走组件包括位于所述工作台上方沿x轴方向延伸的第二导轨、两个分别设于所述第二导轨上下两侧上的第二导槽、至少一设于所述第二导槽上沿所述第二导槽延伸方向移动的第二移动单元,所述第二移动单元带动所述第三行走组件及所述光束感测元件沿第二导槽延伸方向移动,所述第二导槽沿第二导轨延伸方向延伸,两个所述第二导轨分别间隔设置在所述第一装配隔板上。
13.进一步的,所述第三行走组件包括一设于所述第二行走组件一侧上沿z轴方向延伸第三导轨及至少一设于所述第三导轨一侧上用于带动所述光束感测元件移动的第三移动单元,所述第三移动单元带动所述光束感测元件沿z轴方向移动。
14.和现有技术相比,本实用新型产生的有益效果在于:
15.1、本实用新型结构简单、实用性强,通过设置升降传动元件驱动所述光束感测元件分别沿x轴、y轴及z轴方向移动,光束产生元件和光束感测能精准地将反射镜安装在反射镜安装位置,便能实现反射镜安装自动化的功能。
16.2、在本实用新型中,通过设置压电动力元件与压电致动元件响应时间短的特性,能精准地将反射镜安装在反射镜安装位置。且通过控自模组的运作,便能实现反射镜安装自动化的功能。
附图说明
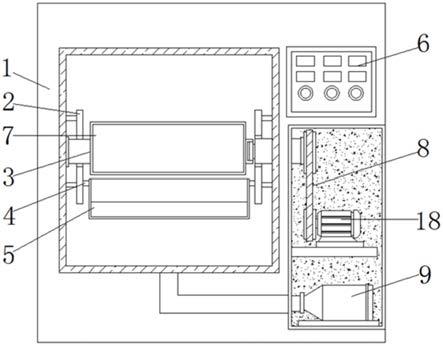
17.图1为本实用新型的结构示意图。
18.图2为图1中a
‑
a剖面的结构示意图。
19.图3为本实用新型的模块结构示意图。
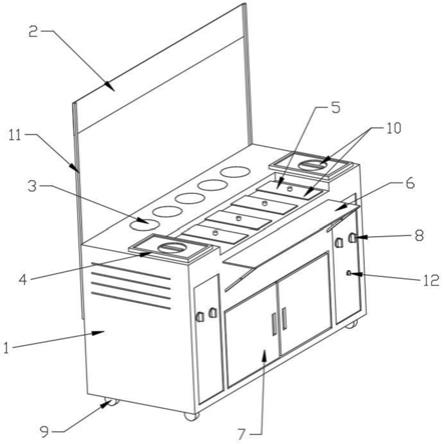
20.图4为升降传动元件的结构示意图。
21.图5为图4中b部分的结构示意图。
22.图6为图4中c部分的结构示意图。
23.图7为图4中d部分的结构示意图。
具体实施方式
24.下面参照附图说明本实用新型的具体实施方式。
25.参照图1、图2和图3,一种改进型的棱镜安装结构,包括一机架12、至少一设于机架12上的升降传动元件131、至少一设于升降传动元件131上的光束感测元件152、至少一设于光束感测元件152下方的工作台13、至少一设于工作台13上的光束产生元件151及至少一设于光束产生元件151上方用于放置安装该棱镜2的棱镜筒容置件12、至少一由升降传动元件131带动的升降平台132、至少一设于升降平台132朝向光束产生元件151方向上的棱镜调整组件14及一控制模组16。
26.参照图1、图2和图3,光束产生元件151朝向光束感测元件152发射一校正光线,升降传动元件131驱动光束感测元件152移动至光束产生元件151上方接收校正光线,升降传动元件131驱动光束感测元件152分别沿x轴、y轴及z轴方向移动。
27.参照图1和图2,棱镜调整组件14包括若干个压电致动元件141及至少一个棱镜触压元件,压电致动元件141动能输出端推动棱镜触压元件接触该棱镜。
28.参照图1和图2,在本实施例中具体的棱镜筒容置件12透过四根脚架121(在此仅标示其中一个)架设于工作台13上,因而在棱镜筒容置件12与工作台13中间形成一个架立空间。另外,棱镜筒容置件12设有一用以放置棱镜筒8的棱镜筒安装部122。棱镜筒安装部122通常是圆柱型的空间,用来放置棱镜筒8。
29.参照图1和图2,棱镜调整组件14包含三个压电致动元件141(在此仅标示其中一个)与一棱镜触压元件142。三个压电致动元件141设置于升降平台132下方,且分别设置于正三角形中的三个角。各压电致动元件141为一压电致动器。因为压电致动器具有体积小、重量轻与响应快速等优点,且具有即动即停的特性,因此能精准地驱动棱镜触压元件142,从而微调棱镜2在棱镜筒8中的定位位置与角度。
30.参照图1和图2,棱镜触压元件142会受压电致动元件141驱动而接触棱镜2。因为压电致动元件141分别设置于正三角形中的三个角,因此可自由而无死角地控制棱镜触压元件142在三维空间中的倾斜角度。另外,棱镜触压元件142为一圆筒型结构。圆筒型结构能较好地调整棱镜2,使棱镜触压元件142能准确地调整棱镜2至各种角度。在本实施例中,棱镜触压元件142是通过压电致动元件141悬设于升降平台132下方。
31.参照图1和图2,升降平台132的下半部可延伸出一具有一通口的延伸台,压电致动元件141可设置于升降平台132的该延伸台上方,并以向上支撑抵顶的方式连结于棱镜触压元件142。棱镜触压元件142穿设于该通口,并受压电致动元件141驱动而接触棱镜2。
32.参照图1和图2,光束校正组件15包含一光束产生元件151与一光束感测元件152。光束产生元件151是设置于工作台13上的架立空间,且会投射出一沿一光束行经路径而穿透棱镜2的校正光束。其中,光束产生元件151为一雷射光源产生器,因为雷射光有笔直的出光路径,从而能更精准地观察测量校正光束投影出的位置、投射区域大小与投射出的区域形状。
33.参照图1和图2,光束感测元件152位于光束行经路径而设置于升降平台132上,且设有一参照投射位置,并用以侦测穿透棱镜2的校正光束而感应出一投射位置。光束感测元件152可以侦测出校正光束在光束感测元件152上投射区域大小与投射区域形状。校正光束的投射位置、投射区域大小与投射区域形状跟棱镜2的偏位角度、偏位位置或棱镜2种类息息相关。另外,在本实施例中,光束感测元件152为一光轴感测器。光轴感测器152能准确地侦测出投射位置、投射区域大小与投射区域形状,从而得知棱镜2在棱镜筒8中的定位状况。
34.参照图1和图2,在本实施例中,光束产生元件151是设置于工作台13上,光束感测元件152设置于升降平台132上。光束产生元件151与光束感测元件152可以相互置换位置。也就是说,光束产生元件151可以设置于升降平台132,光束感测元件152可以设置于工作台13上。
35.参照图1、图2和图3,控制模组16电连接压电动力元件134、升降高度感测元件135、压电致动元件141与光束感测元件152,并通过控制压电动力元件134与压电致动元件141,并参照升降高度感测元件135所回传的位移变化资料,将投射位置调整至参照投射位置,而使棱镜2被调整至棱镜安装位置。也就是说,压电致动元件141会驱动棱镜触压元件142而使棱镜触压元件142将棱镜2推顶至棱镜安装位置,并使棱镜2转向,从而将投射位置调整至参
照投射位置。控制模组16可为一控制电路、一控制晶片或智能控制装置,且控制模组16可通过类神经网路以及模糊类神经网路等常使用的智能控制策略,来进行升降高度感测元件135与光束感测元件152所回传的讯号与资料的处理,并控制压电动力元件134与压电致动元件141。
36.参照图1和图2,先将棱镜2置入棱镜筒8内,因为尚未调整过棱镜2的位置,所以棱镜2并未准确地安装在棱镜安装位置。因此,经过棱镜2折射的校正光束在光束感测元件152上所投射出的投射位置并未对准参照投射位置。自光束产生元件151所产生的校正光束会沿光束行经路径先穿射过位在棱镜筒安装部122的棱镜筒8内的棱镜2。校正光束经过棱镜2的折射后,会经由并穿过为圆筒形结构的棱镜触压元件142,投射在光束感测元件152上。此时的投射位置与参照投射位置并不相同。
37.参照图1和图2,在棱镜触压元件142触压到棱镜2后,通过压电致动元件141在三维空间中调整棱镜触压元件142的触压角度,将棱镜2精准地调整至棱镜安装位置,使得投射位置与参照投射位置重合,也就是使校正光束投射在参照投射位置。也可以通过校正光束在光束感测元件152上呈现的光束投射区域大小与形状,来判断棱镜2在棱镜筒8内的位置。
38.参照图1、图2和图4,升降传动元件131包括至少一装设在机架11上的第一行走组件1、至少一设于第一行走组件1上的第二行走组件2及至少一设于第二行走组件2上的第三行走组件3,第一行走组件1带动光束感测元件152沿y轴方向移动,第二行走组件2带动光束感测元件152沿x轴方向移动,第三行走组件3带动光束感测元件152沿z轴方向移动。
39.参照图4、图5和图6,第一行走组件1包括两个分别设于工作台13左右两侧上可沿y轴方向移动的第一移动单元5及至少两个分别设于工作台13左右两侧上用于安装第一移动单元5的第一导轨11,第一导轨11上下两侧分别各设有一沿第一导轨11延伸方向设置的第一导槽16,第二行走组件22的左右两端分别装设有至少一第一移动单元5,第二行走组件22位于工作台13的上方。
40.参照图4、图5和图6,第一移动单元5包括两个相对设置的第一装配隔板15、至少两个间隔设于第一导槽16上可转动的第一从动轮17、至少一设于第一装配隔板15一侧上的第一伺服电机14、一位于第一装配隔板15另一侧上安装在第一伺服电机14输出端上的第一主动轮19及一第一传动带20。
41.参照图4、图5和图6,第一伺服电机14的使能端与伺服电机驱动电路板41的输出端相电连接,第一传动带20的动能输入端绕设在第一主动轮19的动力输出端上,第一传动带20的动能输出端绕设在第一从动轮17的动力输入端上,两个第一装配隔板15分别设于工作台13的左右两侧,第一主动轮19设于两个第一从动轮17之间且第一主动轮19设置的高度高于第一从动轮17设置的高度。
42.参照图4、图5和图6,通过设置第一主动轮19设于两个第一从动轮17之间且第一主动轮19设置的高度高于第一从动轮17设置的高度,一方面使得第一传动带20张紧提高第一传动带20的传动效果,另一方面使用第一传动带20进行动能传递后期维护成本低,从而起到降低设备后期维护成本的效果,起到了一举两得的效果。
43.参照图4、图5和图6,在本实施例中具体的第一从动轮17共至少设有两组,每组至少两个第一从动轮17,两组第一从动轮17分别设于第一导轨11的上下两侧上,第一从动轮17的动能输入端与第一装配隔板15相连接。
44.参照图4、图5和图6,通过由第一伺服电机14转动驱动第一主动轮19转动产生输出动力经由第一传动带20动能传动到第一从动轮17上,使得第一从动轮17转动从而带动第一装配隔板沿y轴方向移动,进而同时带动第二行走组件22和光束感测元件152沿y轴移动。
45.参照图4、图5和图6,通过设置两组第一从动轮17夹设在第一导轨11的上下两侧上,具体的第一从动轮17设置在第一导槽16内,从而使得第一导轨11夹设在两组第一从动轮17之间,一方面使得第二行走组件22和光束感测元件152在沿y轴移动时更为稳定,提高镜片切割时的精度,另一方面第一从动轮17起到支撑和导向第一装配隔板15移动的作用,提高第一移动单元5的稳定性,起到了一举两得的效果。
46.参照图4、图5和图6,第一从动轮17上设有第一轴承,第一装配隔板15上设有至少两个间隔设置的第一轴承杆111,第一轴承杆111穿过第一轴承使得第一从动轮17安装在,第一轴承杆111的一端上设有外螺纹,外螺纹上锁固有一用于装配第一从动轮17的第一锁固件18。
47.参照图4和图7,第二行走组件22包括位于工作台13上方沿x轴方向延伸的第二导轨22、两个分别设于第二导轨22上下两侧上沿x轴方向延伸的第二导槽24及至少一设于第二导槽24上沿第二导槽24延伸方向移动的第二移动单元6。
48.参照图4和图7,第二移动单元6带动第三行走组件3及光束感测元件152沿第二导槽24延伸方向x轴方向移动,第二导槽24沿第二导轨22延伸方向延伸,两个第二导轨22分别间隔设置在第一装配隔板15上。
49.参照图4和图7,第二移动单元6包括两个分别设于第二导轨22前后两侧上的第二装配隔板25、至少两个间隔设于第二导槽24上的第二从动轮27、至少一设于第二装配隔板25一侧上的第二伺服电机23、一位于第二装配隔板25另一侧上安装在第二伺服电机23输出端上的第二主动轮42及一第二传动带43。
50.参照图4和图7,第二伺服电机23的使能端与伺服电机驱动电路板41的输出端相电连接,第二传动带43的动能输入端绕设在第二主动轮42的动力输出端上,第二传动带43的动能输出端绕设在第二从动轮27的动力输入端上,两个第二装配隔板25分别设于第二导轨22的前后两侧,第二主动轮42设于两个第二从动轮27之间。
51.参照图4和图7,通过由第二伺服电机23转动驱动第二主动轮42转动产生输出动力经由第二传动带43动能传动到第二从动轮27上使得第二从动轮27转动,使得第二从动轮27在第二导槽24内移动,从而带动第二装配隔板25沿x轴方向移动,进而带动光束感测元件152沿x轴移动。
52.参照图4和图7,第二从动轮27共至少设有两组,每组至少两个第二从动轮27,两组第二从动轮27分别设于第二导轨22的上下两侧上,第二从动轮27的动能输入端与第二装配隔板25相连接。
53.参照图4和图7,通过设置两组第二从动轮27夹设在第二导轨22的上下两侧上,具体的第二从动轮27设置在第二导槽24内,从而使得第二导轨22夹设在两组第二从动轮27之间,一方面使得光束感测元件152在沿x轴移动时更为稳定,提高镜片切割时的精度,另一方面第二从动轮27起到支撑和导向第二装配隔板25移动的作用,从而提高光束感测元件152沿x轴移动的稳定性,起到了一举两得的效果。
54.参照图4和图7,通过设置第二主动轮42设于两个第二从动轮27之间且第二主动轮
42设置的高度高于第二从动轮27设置的高度,一方面使得第二传动带43张紧提高第二传动带43的传动效果,另一方面使用第二传动带43进行动能传递后期维护成本低,从而起到降低设备后期维护成本的效果,起到了一举两得的效果。
55.参照图4和图7,两个第二装配隔板25之间通过一第二轴承28杆相连接,具体的第二轴承28杆的两端均分别装设在对应的第二装配隔板25上,第二轴承28为四根,分为两组每组两根分别设置在第二导轨22的上下两侧上。
56.参照图4和图7,第二从动轮27上设有第二轴承28,第二轴承28杆穿过第二轴承28使得第二从动轮27安装在,第二轴承28杆的一端上设有外螺纹,外螺纹上锁固有一用于将第二轴承28杆装配在第二装配隔板25上的第二锁固件。
57.参照图4和图7,第三行走组件3包括一设于第二行走组件22一侧上沿z轴方向延伸第三导轨37及至少一设于第三导轨37一侧上用于带动光束感测元件152移动的第三移动单元7,第三移动单元7带动光束感测元件152沿z轴方向移动。
58.参照图4和图7,第三行走组件3还包括一设于第三导轨37上沿第三导轨37延伸方向设置的第三导槽38、若干个可滑动的嵌设于第三导槽38上的第三从动轮31、设于第三从动轮31上的第三轴承及设于第三轴承上的第三轴承杆,第三导轨37沿z轴方向延伸,第三轴承杆一端装设在第二安装座的底部上,第三轴承杆的另一端设置有第三锁固件32。
59.参照图4和图7,第三导轨37与传动丝杆相平行设置,第三导轨37夹设在第二安装座和第三从动轮31之间。
60.参照图4和图7,第三轴承杆穿过第三轴承使得第三从动轮31安装在,第三轴承杆的一端上设有外螺纹,外螺纹上锁固有一用于将第三轴承杆装配在第三隔板上的第三锁固件32,第三轴承的另一端装设在第二装配隔板25上。
61.参照图4和图7,第三移动单元7包括至少一设于第三导轨37之间的传动丝杆、至少一安装在第三安装座另一侧用于驱动传动丝杆转动的第三伺服电机34,传动丝杆的动力输入端与第三伺服电机34的动力输出端相连接。第三伺服电机34的使能端与伺服电机控制电路板的输出端相电连接。
62.参照图4和图7,在本实施例中具体的,两个间隔设置的第三导轨37左右两端上分别安装在第三装配隔板上,两个第三导轨37和两个第三装配隔板围成一第三矩形空腔,传动丝杆由一端的第三装配隔板穿入到第三矩形空腔内延伸到另一端的第三装配隔板上安装,第三导轨37与传动丝杆相平行设置,传动丝杆和升降平台132之间通过一连接块连接,第三伺服电机34驱动传动丝杆转动从而带动连接块沿传动丝杆传动方向移动,进而使得连接块带动光束感测元件152沿传动丝杆传动方向z轴方向移动,实现驱动光束感测元件152沿z轴方向移动。
63.第一锁固件18、第二锁固件、第三锁固件32均可以为螺母,第一导轨11、第二导轨22、第三导轨37均为方管框架型材,具体型号可以为ob
‑
4040l的铝型材,第二导轨22和第一装配隔板15之间通过角铝相连接。
64.通过设置压电动力元件与压电致动元件响应时间短的特性,能精准地将反射镜安装在反射镜安装位置。且通过控自模组的运作,便能实现反射镜安装自动化的功能。
65.在本实用新型中,通过设置升降传动元件驱动所述光束感测元件分别沿x轴、y轴及z轴方向移动,光束产生元件和光束感测能精准地将反射镜安装在反射镜安装位置,便能
实现反射镜安装自动化的功能。
66.上述仅为本实用新型的具体实施方式,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。