1.本发明属于机械加工技术领域,具体涉及一种悬挂式双硬臂提升装置。
背景技术:
2.装配生产线在装配一些重型零部件时,大多采用环链或钢丝绳吊具钩挂住待装零部件,用吊车配合装配,或工人抬着零部件进行装配。由于悬挂系统大部件都比较重,并且形状不规则,重心位置不同,用一种吊具不能完成多类型悬挂系统所有大部件的装配,因此,需要频繁更换吊具,占用大量有效工作时间;由于传统的智能悬浮机械臂只能承受最大不超过200kg的负载,不能满足200kg以上零部件的装配需求,因此只能凭借吊车配合进行装配,上述装配方式工作效率低、劳动强度大,并存在安全隐患。
技术实现要素:
3.本发明的目的是提供一种悬挂式双硬臂提升装置,辅助人工操作,完成多种大部件的装配,解决工作效率低、劳动强度大和存在安全隐患的技术问题,具有通用性。
4.本发明的技术方案是,一种悬挂式双硬臂提升装置包括吊挂组件1、回转支承2、旋转组件3、升降组件4和提升机5;旋转组件3通过回转支承2与吊挂组件1连接,提升机5悬挂在旋转组件的顶端,提升机5的起重钩与升降组件4连接;
5.回转支承2包括内圈、外圈和滚动体,回转支承2的内圈、外圈分别与吊挂组件1与旋转组件3固定连接,多个滚动体均匀分布在内圈滚道与外圈滚道之间;
6.提升机5悬挂于转向架8上,提升机的吊钩勾接升降组件。
7.所述吊挂组件1包括承重框架6和四套轨道轮组7,四套轨道轮组7均与承重框架6铰接;
8.轨道轮组7包括支座和多个尼龙轮,多个尼龙轮安装在支座上,四套轨道轮组通过各自的支座分别与承重框架6的四个角形成铰链式连接,尼龙轮在车间桁架的轨道上滚动。
9.所述旋转组件包括转动架8、铝合金行走轨9和加强型材10;2个铝合金行走轨平行固定在加强型材10上,转动架8固定在2个铝合金行走轨9的上端,且回转支承的外圈固定中转动架8上。
10.升降组件4包括导向装置12和l型吊臂13;l型吊臂13的一端与导向装置12铰接,导向装置12的结构与吊挂组件结构相同,导向装置12中的四套导轨轮在铝合金行走轨道9上滚动,l型吊臂的另一端通过销轴连接辅助吊具。
11.本发明的有益效果是,本发明通过机械机构与智能升降机巧妙组合,结构独特,最大承受载荷可达到800kg,解决了传统悬浮式机械臂无法承载200kg以上重型零部件的问题;本发明提升装置的吊挂组件上的轨道轮组由多组尼龙轮组成,与承重框架采用铰链式连接,在运动过程中可以补偿轨道直线度误差,使其运动更加灵活;本发明中的旋转组件可围绕回转支撑旋转
±
350
°
,铝合金行走轨为升降组件提供了垂直方向行走导向,同时与转动架共同完成抵抗负载施加给提升机的倾覆力矩,保证负载可以沿着竖直方向平稳升降。
背部的加强型材连接于转动架和铝合金行走轨之上,增加了整体的抗弯性能。本发明承载能力强,运行平稳,操作便捷,定位精准。本发明结构新颖,通用性好,可有效提高工作效率,降低安全隐患,可适用于多种的装配环境,具有推广价值。
附图说明
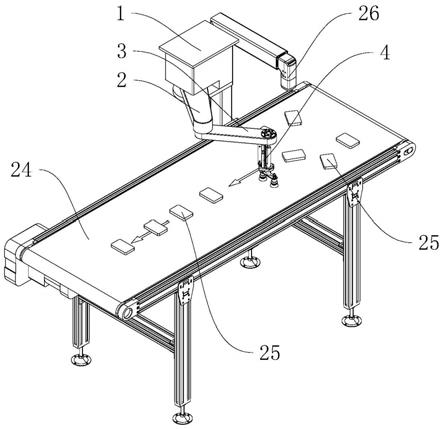
12.图1为本发明一种悬挂式双硬臂提升装置的结构示意图
13.图2为本发明中吊挂组件的结构示意图;
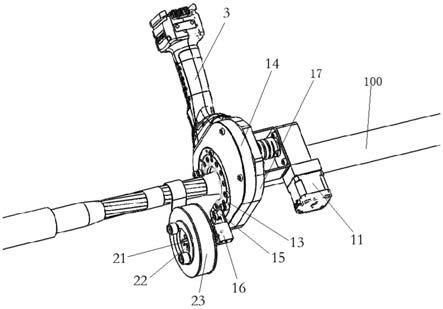
14.图3为本发明中旋转组件的结构示意图;
15.图4为本发明中升降组件的结构示意图。
具体实施方式
16.下面结合说明书附图对本发明的技术方案作进一步详细描述。
17.如图1所示,本发明一种悬挂式双硬臂提升装置包括吊挂组件1、回转支承2、旋转组件3、升降组件4和提升机5。该提升装置通过吊挂组件1悬挂在车间的车间桁架上,旋转组件3通过回转支承2与吊挂组件1连接,形成一套可
±
350
°
回转的硬臂,提升机5悬挂在旋转组件的顶端,提升机5可随旋转组件转动,提升机5的起重钩与升降组件4连接,升降组件4通过提升机5的动力沿旋转组件中铝合金行走轨9作上下运动。不同的专用夹具与升降组件连接,实现快速装卡、安装不同的大部件功能。其特点是提升重量大,运动灵活,操作方便,可缓解车间内大型行吊能力不足的矛盾。
18.如图2是所示,吊挂组件1是提升装置的行走机构,用于在车间桁架上往复运动。吊挂组件1包括承重框架6和四套轨道轮组7。四套轨道轮组7均与承重框架6铰接。
19.轨道轮组7包括支座和多个尼龙轮,多个尼龙轮安装在支座上,四套轨道轮组通过各自的支座分别与承重框架6的四个角形成铰链式连接。运动时,轨道轮组7在车间桁架的轨道上滚动,即尼龙轮在车间桁架的轨道上滚动。在运动过程中可以补偿轨道直线度误差,使其运动更加灵活。
20.回转支承2包括内圈、外圈和滚动体,回转支承2是一种能够承受综合载荷的大型轴承,可以同时承受较大的轴向、径向负荷和倾覆力矩。回转支承2连接于吊挂组件1与旋转组件3之间,即内圈、外圈分别与吊挂组件1与旋转组件3固定连接,保证在承受较大负载及较大倾覆力矩的情况下,仍然可以轻松旋转。多个滚动体均匀分布在内圈与外圈之间。内圈与外圈的表面上设置有滚道。
21.如图3所示,旋转组件3安装于回转支承2下面,可围绕回转支承撑旋转
±
350
°
。旋转组件包括转动架8、铝合金行走轨9、加强型材10和操作扶手11。2个铝合金行走轨平行布置,加强型材10固定在2个铝合金行走轨的背面,以增加行走轨的强度。即2个铝合金行走轨平行固定在加强型材10上。转动架8固定在2个铝合金行走轨9的上端,且回转支承的外圈固定中转动架8上。2个铝合金行走轨9为升降组件提供了垂直方向行走导向,同时与转动架8共同完成抵抗负载施加给提升机的倾覆力矩,保证负载可以沿着竖直方向平稳升降。背部的加强型材10连接于转动架和铝合金行走轨9之上,增加了整体的抗弯性能,提升设备的可靠性。在铝合金行走轨末端共安装四个操作扶手,方便操作者在各个位置控制提升机平移及旋转动作。
22.如图4所示,升降组件4包括导向装置12和l型吊臂13组成。l型吊臂13的一端与导向装置12铰接。导向装置12的结构与吊挂组件结构相同。导向装置通过四套导轨轮组安装于旋转组件的铝合金行走轨道9上,即导向装置12中四套导轨轮在铝合金行走轨道9上滚动,可随提升机沿轨道上下移动。l型吊臂与导向装置通过销轴连接,l型吊臂的另一端通过销轴连接辅助吊具,更换吊具方便、快捷,l型吊臂可吊着工件避开遮挡物。
23.如图1所示,提升机5采用标配提升机,为该设备的动力来源,其悬挂于转向架8上,可随旋转组件同步旋转,提升机的吊钩作用于升降组件,即提升机的吊钩勾接升降组件,带动负载升降。提升机是智能控制模块与环链葫芦相结合的产品,可以满足吨位级重型产品提升、准确对位。智能控制模块打破了环链葫芦常规的控制方式,在操作手柄内装有高精度电位器,具有无极调速的功能,设置了快速升降、点动、急停等多种控制模式,满足重型零部件安装精准对位操作,安全可靠。
技术特征:
1.一种悬挂式双硬臂提升装置,其特征是:该提升装置包括吊挂组件1、回转支承2、旋转组件3、升降组件4和提升机5;旋转组件3通过回转支承2与吊挂组件1连接,提升机5悬挂在旋转组件的顶端,提升机5的起重钩与升降组件4连接;回转支承2包括内圈、外圈和滚动体,回转支承2的内圈、外圈分别与吊挂组件1与旋转组件3固定连接,多个滚动体均匀分布在内圈滚道与外圈滚道之间;提升机5悬挂于转向架8上,提升机的吊钩勾接升降组件。2.按照权利要求1所述的一种悬挂式双硬臂提升装置,其特征在于:所述吊挂组件1包括承重框架6和四套轨道轮组7,四套轨道轮组7均与承重框架6铰接;轨道轮组7包括支座和多个尼龙轮,多个尼龙轮安装在支座上,四套轨道轮组通过各自的支座分别与承重框架6的四个角形成铰链式连接,尼龙轮在车间桁架的轨道上滚动。3.按照权利要求1所述的一种悬挂式双硬臂提升装置,其特征在于:所述旋转组件包括转动架8、铝合金行走轨9和加强型材10;2个铝合金行走轨平行固定在加强型材10上,转动架8固定在2个铝合金行走轨9的上端,且回转支承的外圈固定中转动架8上。4.按照权利要求1所述的一种悬挂式双硬臂提升装置,其特征在于:升降组件4包括导向装置12和l型吊臂13;l型吊臂13的一端与导向装置12铰接,导向装置12的结构与吊挂组件结构相同,导向装置12中的四套导轨轮在铝合金行走轨道9上滚动,l型吊臂的另一端通过销轴连接辅助吊具。
技术总结
本发明涉及一种悬挂式双硬臂提升装置,该提升装置包括吊挂组件1、回转支承2、旋转组件3、升降组件4和提升机5;旋转组件3通过回转支承2与吊挂组件1连接,提升机5悬挂在旋转组件的顶端,提升机5的起重钩与升降组件4连接;回转支承2包括内圈、外圈和滚动体,回转支承2的内圈、外圈分别与吊挂组件1与旋转组件3固定连接,多个滚动体均匀分布在内圈滚道与外圈滚道之间;提升机5悬挂于转向架8上,提升机的吊钩勾接升降组件。本发明解决工作效率低、劳动强度大和存在安全隐患的技术问题,具有通用性。具有通用性。具有通用性。
技术研发人员:李杰 王锦明 张鑫 白雪松 尹彦东 董鹏 吕哲 王帅 蔡向阳 詹浩 王智斌 陈智渊 董永光 王宁辉 王智伟 侯艳玲 赵智 冯和平 周杨 赵赫 李飞 周丽丽 焦淑清 陈刚
受保护的技术使用者:内蒙古第一机械集团股份有限公司
技术研发日:2021.08.10
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。