1.本发明涉及蔬菜采收的技术领域,特别是一种避免夹伤菜叶的输送装置。
背景技术:
2.自动化植物工厂的蔬菜是间隔固定距离种植于平面种植板上的,成熟蔬菜的自动化采收目前是通过机械夹爪夹紧种有蔬菜的种植杯,然后将种植杯从种植板上的固定孔位中取出,使种植杯和蔬菜与种植板分离,以便进行后续的采收动作。由于蔬菜菜叶长势不规则且面积较大,容易下垂遮住种植杯,在夹爪接近种植杯的移动过程中,夹爪会碰到菜叶并将其戳伤,导致菜叶折断散落,造成浪费,影响品质。
技术实现要素:
3.为此,需要提供一种避免夹伤菜叶的输送装置,解决现有装置采收时,夹爪夹取种植杯时,容易损伤菜叶的问题。
4.为实现上述目的,本发明提供了一种避免夹伤菜叶的输送装置,包括种植板输送线、龙门架和挡叶组件,所述龙门架设置在种植板输送线的输出端上,所述挡叶组件包括多个间隔设置的挡叶片,所述龙门架包括横梁和两个侧梁,横梁的两端与侧梁的顶端相固定,所述挡叶片竖直设置在龙门架的横梁上,相邻两个挡叶片之间的间距形成挡叶通道,所述挡叶通道开口沿种植板输送线的输送方向逐渐减小。
5.进一步,还包括有升降气缸,所述升降气缸竖直固定在侧梁上,所述挡叶组件还包括安装横板,安装横板位于横梁的上表面,所述横梁上设有上下贯通的升降通孔,所述挡叶片的顶端活动穿过升降通孔并与安装横板固定,所述安装横板的一端与升降气缸的输出轴连接。升降气缸驱动挡叶片上升,让出龙门架下方的空间,方便采收夹具夹取种植杯后带动种植杯向上移动,将种植杯和蔬菜与种植板分离。
6.进一步,所述横梁的两端开设有安装通孔,安装通孔内安装有直线轴承,所述直线轴承内设有挡叶片导向轴,所述挡叶片导向轴的顶端与安装横板固定。通过直线轴承和挡叶片导向轴的配合使得挡叶片能够平稳的进行垂直方向上的移动。
7.进一步,所述挡叶片的横截面为v型,升降通孔的形状也为v型,v型挡叶片的开口端朝向种植板输送线的输出端。相邻的两个v型挡叶片也使得挡叶通道的开口沿种植板输送线的输送方向逐渐减小。
8.进一步,还包括有两个相对设置的水平滑轨和水平驱动单元,所述侧梁的底端滑动的设置在水平滑轨上,所述水平滑轨的轴向与种植板输送线的输送方向相平行,所述水平驱动单元与侧梁传动连接。
9.进一步,所述水平驱动单元包括水平驱动电机、同步皮带、主动轮、从动轮和夹紧板,所述主动轮设置在水平驱动电机的输出轴上,所述水平驱动电机和从动轮固定在种植板输送线上,所述同步皮带连接主动轮和从动轮,所述龙门架的一个侧梁上固定有侧板,所述侧板与夹紧板相固定,所述侧板和夹紧板之间设有固定间隙,所述同步皮带固定穿过固
定间隙。水平驱动单元用于驱动龙门架进行水平移动,采收夹取每完成一列蔬菜的采集,则龙门架往与种植板输送线相反的方向进行移动,对下一列蔬菜的菜叶进行梳理,方便继续进行采收。
10.进一步,所述夹紧板朝向侧板的侧面上设有固定凸起,所述固定凸起与同步皮带相接触。方便与同步皮带进行固定。
11.进一步,所述种植板输送线包括输送机架、两个相对设置的倍速链和定位挡块,所述倍速链固定在输送机架上,所述定位挡块固定在输送机架上,所述定位挡块位于倍速链的输出端上。
12.上述技术方案具有以下有益效果:
13.本发明中,每一挡叶通道对应种植板上每一排待采收蔬菜,蔬菜经过挡叶通道时,挡叶片将蔬菜的菜叶向后梳理,露出被菜叶遮挡的种植杯的夹持部位,方便夹取机器人上的采收夹具夹取种植杯,避免了采收夹具在夹取种植杯的移动过程中与菜叶碰撞而导致的菜叶受损,提高采收效率品质。
附图说明
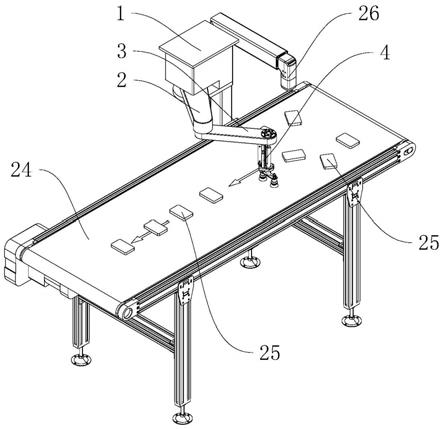
14.图1为具体实施方式所述输送装置、夹取机器人、剪根采收输送线组合使用的结构图;
15.图2为具体实施方式所述输送装置、夹取机器人配合使用的状态图。
16.图3为具体实施方式所述输送装置输出端的结构图。
17.图4为具体实施方式所述龙门架和挡叶组件的结构图。
18.图5为具体实施方式所述夹紧板与侧板的固定。
19.附图标记说明:
20.1、种植板输送线;11、输送机架;12、倍速链;13、定位挡块;
21.2、夹取机器人;21、采收夹具;
22.3、剪根采收输送线;
23.4、龙门架;41、横梁;42、侧梁;43、升降通孔;44、侧板;45、挡叶片导向轴;46、直线轴承;47、安装通孔;
24.5、挡叶组件;51、挡叶片;52、挡叶通道;53、升降气缸;54、水平滑轨;55、水平驱动单元;551、水平驱动电机;552、同步皮带;553、主动轮;554、从动轮;555、夹紧板;56、安装横板;
具体实施方式
25.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
26.请参阅图1
‑
5,本实施例一种避免夹伤菜叶的输送装置,包括种植板输送线1、龙门架4和挡叶组件5,种植板输送线1包括输送机架11、两个相对设置的倍速链12和定位挡块13,倍速链12固定在输送机架11上,定位挡块13固定在输送机架11上,定位挡块13位于倍速链12的输出端上。
27.龙门架4设置在种植板输送线1的输出端上,挡叶组件5包括多个间隔设置的挡叶
片51,龙门架4包括横梁41和两个侧梁42,横梁41的两端与侧梁42的顶端相固定,挡叶片51竖直设置在龙门架4的横梁41上,相邻两个挡叶片51之间的间距形成挡叶通道52,挡叶通道52开口沿种植板输送线1的输送方向逐渐减小。本实施例中,输送机架11上固定有两个相对设置的水平滑轨54和水平驱动单元55,水平滑轨54的轴向与种植板输送线1的输送方向相平行,侧梁42的底端滑动的设置在水平滑轨54上,水平驱动单元55与侧梁42传动连接。
28.具体的,水平驱动单元55包括水平驱动电机551、同步皮带552、主动轮553、从动轮554和夹紧板555,主动轮553设置在水平驱动电机551的输出轴上,水平驱动电机551和从动轮554固定在输送机架11上,同步皮带552连接主动轮553和从动轮554,龙门架4的一个侧梁42上固定有侧板44,侧板44与夹紧板555相固定,侧板44和夹紧板555之间设有固定间隙,同步皮带552固定穿过固定间隙。水平驱动单元55用于驱动龙门架4进行水平移动,采收夹取每完成一列蔬菜的采集,则龙门架4往与种植板输送线1相反的方向进行移动,对下一列蔬菜的菜叶进行梳理,方便继续进行采收,夹紧板555朝向侧板44的侧面上设有固定凸起,固定凸起与同步皮带552相接触。方便与同步皮带552进行固定。
29.龙门架4的一侧梁42上竖直固定有升降气缸53,升降气缸53的输出轴朝上,挡叶组件5还包括安装横板56,安装横板56位于横梁41的上表面,横梁41上设有上下贯通的升降通孔43,挡叶片51的顶端活动穿过升降通孔43并与安装横板56固定,安装横板56的一端与升降气缸53的输出轴连接。升降气缸53驱动挡叶片51上升,让出龙门架4下方的空间,方便采收夹具21夹取种植杯后带动种植杯向上移动,将种植杯和蔬菜与种植板分离。具体的,升降气缸53的输出轴为活塞杆。
30.本实施例中,横梁41的两端开设有安装通孔47,安装通孔47内安装有直线轴承46,直线轴承46内设有挡叶片导向轴45,挡叶片导向轴45的顶端与安装横板56固定。通过直线轴承46和挡叶片导向轴45的配合使得挡叶片51能够平稳的进行垂直方向上的移动。
31.挡叶片51的横截面为v型,v型挡叶片51的开口端朝向种植板输送线1的输出端。升降通孔43的形状也相对应的为v形,相邻的两个v型挡叶片51也使得挡叶通道52的开口沿种植板输送线1的输送方向逐渐减小。v型挡叶片51的间距与种植板上蔬菜间距一致。
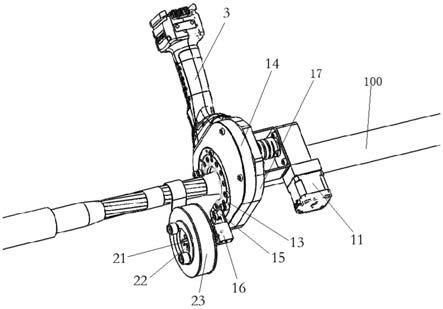
32.本实施例进行蔬菜采收时,配合夹取机器人2、剪根采收输送线3进行使用,夹取机器人2位于种植板输送线1的输出端,夹取机器人2的输出轴上固定有采收夹具21,还包括有种植板回收线,种植板回收线设置在种植板输送线1的输出端,采收夹具21包括夹爪安装板、多个机械夹爪和真空吸盘,多个机械夹爪间距设置在夹爪安装板上,真空吸盘固定在夹爪安装板上,夹爪安装板固定在夹取机器人2的输出轴上。夹取机器人2为六轴机器人。剪根采收输送线3包括采收机架、剪根单元和成品输送线,剪根单元和成品输送线固定在采收机架上,剪根单元位于成品输送线的侧边,剪根单元包括两个相向运动的刀片组件,刀片组件包括多个刀片,种植杯的侧面上开设有刀具让位槽,刀具让位槽与刀片相对应
33.本实施例使用时:
34.1.初始状态,龙门架4位于种植板输送线1的输出端上,v型挡叶片51位于龙门架4下方;
35.2、倍速链12将待采收的种植板输送至种植板输送线1输出端定位挡块13定位,由于v型挡叶片51处于固定位置,在种植板接触定位块前,种植板上的蔬菜将被v型挡叶片51的之间的挡叶通道52阻挡并向后梳理;
36.3、随着种植板与定位挡块13接触定位以及菜叶被v型挡叶片51阻挡梳理,位于蔬菜根部种植板栽培穴内的种植杯杯沿将露出,等待夹取机器人2上机械夹爪的夹取;
37.4、采收夹具21上的机械夹爪贴近种植板并向种植杯靠近,到位后夹紧种植杯,由于夹爪移动路径上的菜叶已被v型挡片阻挡梳理,故夹爪夹取种植杯的过程中不会与菜叶接触,也就不会导致蔬菜受损;
38.5、夹爪夹紧种植杯后,升降气缸53动作,升降气缸53的活塞杆向上伸出,将安装横板56及其上的v型挡叶片51顶起,让出龙门架4下方的空间;
39.6、挡叶片51升起后,夹爪带动种植杯向上移动,将种植杯和蔬菜与种植板分离,然后进行下一步采收动作;
40.7、第一排的蔬菜完成取出采收后,升降气缸53再次动作,活塞杆缩回,带动安装横板56及其上的v型挡叶片51下降到位;
41.8、挡叶片51下降到位后,水平驱动电机551动作,驱动同步皮带552带动龙门架4往后排蔬菜位置移动,移动距离为各排蔬菜的间距;
42.9、龙门架4移动到位后,位于龙门架4下方的v型挡叶片51将下一排蔬菜的菜叶阻挡并向上梳理,露出种植杯,等待夹爪的夹取;
43.10、重复步骤4
‑
9,当一个种植板上的蔬菜全部采收完后,龙门架4及v型挡叶片51复位,准备下一循环。
44.本发明中,每一挡叶通道52对应种植板上每一排待采收蔬菜,蔬菜经过挡叶通道52时,挡叶片51将蔬菜的菜叶向后梳理,露出被菜叶遮挡的种植杯的夹持部位,方便夹取机器人2上的采收夹具21夹取种植杯,避免了采收夹具21在夹取种植杯的移动过程中与菜叶碰撞而导致的菜叶受损,提高采收效率品质。
45.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括
……”
或“包含
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的要素。此外,在本文中,“大于”、“小于”、“超过”等理解为不包括本数;“以上”、“以下”、“以内”等理解为包括本数。
46.尽管已经对上述各实施例进行了描述,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改,所以以上所述仅为本发明的实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。