技术特征:
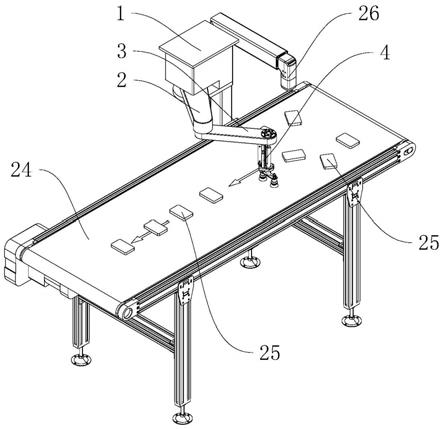
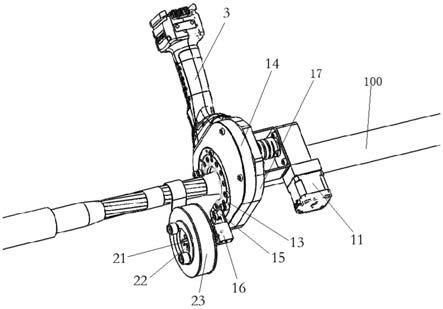
1.一种航空港行李箱搬运系统,其特征在于:包括控制单元、与控制单元信号连接的检测单元和用于运输行李箱的运输单元;所述控制单元包括控制箱和固定安装于机械臂上、且受控于控制单元的抓手;所述检测单元包括网格激光、工业相机和压力薄膜传感器;所述工业相机和网格激光均安装于抓手的顶板上,且工业相机的四周环设有若干个点光源灯;所述压力薄膜传感器固定安装于抓手的内侧侧壁上;所述运输单元包括传送带和设置于传送带一侧的运输小车。2.根据权利要求1所述的航空港行李箱搬运系统,其特征在于:所述网格激光、工业相机、薄膜压力传感器与小型嵌入式工控机连接,并通过小型嵌入式工控机与控制箱通信连接。3.根据权利要求1所述的航空港行李箱搬运系统,其特征在于:所述点光源灯为led发光光源灯。4.根据权利要求1
‑
3任一所述的航空港行李箱搬运系统的控制方法,其特征在于,包括以下步骤:s1、工业相机标定,包括工业相机机内参数标定和手眼坐标转换关系标定;s2、工业相机采集传送带上行李箱的图像信息,并将采集的图像信息传送至控制单元进行处理,得到图像中行李箱的位置信息;s3、根据行李箱的位置信息控制抓手移动至目标位置,根据行李箱移动轨迹,控制抓手移动,设定抓手垂直下移距离和水平位移,直至抓手移动至行李箱的两侧;s4、根据行李箱重量和薄膜传感器反馈的压力值抓取行李箱,并实时调整抓手的抓取力度;s5、控制单元驱动机械臂旋转作业,将行李箱运输至运输小车上方,继续下移机械臂,控制抓手释放行李箱,行李箱落在运输小车上;s6、控制单元控制机械臂回调至初始位置。5.根据权利要求4所述的航空港行李箱搬运系统的控制方法,其特征在于,所述步骤s2中工业相机采集传送带上行李箱的图像信息,并将采集的图像信息传送至控制单元进行处理,得到图像中行李箱的位置信息,包括:采用剪影处理法对采集的图像信息数据进行标记提取;对提取的图像信息进行二值化处理,并对二值化处理后的图像进行图像分割,得到含有行李箱目标区域的图像信息;对分割后的图像信息进行滤波处理;采用骨架化识别目标区域位置信息,并将位置信息传送至控制单元。6.根据权利要求4所述的航空港行李箱搬运系统的控制方法,其特征在于,所述步骤s3中计算行李箱的移动轨迹,包括:网格激光对待抓取行李箱的表面投射一组平行网格红色激光线,工业相机配合点光源进行图像拍摄,并将拍摄的图像信息传输至控制单元;采用标准霍夫变换计算网格中水平直线方程和垂直直线方程,然后通过水平直线和垂直直线的交点计算网格线的起止点坐标;将计算得到的起止点坐标在二值化图像的基础上进行直线绘制,并得出网格线检测的
结果图。7.根据权利要求6所述的航空港行李箱搬运系统的控制方法,其特征在于,根据网格线检测的结果图,计算网格水平线起始点坐标:保持垂直直线方程不变,依次遍历所有水平直线方程,并计算每一条水平直线和既定的垂直线的交点坐标,计算得到实际网格水平直线的起始点坐标;保持水平直线方程不变,依次遍历所有垂直直线方程,计算水平直线和垂直直线的交点坐标,计算得到实际网格垂直方向直线的起始点坐标;根据网格线检测的结果图,计算网格水平线终点坐标:保持水平直线方程不变,依次遍历所有垂直直线方程,并计算每一条垂直直线和既定的水平直线的交点坐标,计算得到实际网格水平直线的终点坐标;保持水平直线方程不变,依次遍历所有垂直直线方程,计算水平直线和垂直直线的交点坐标,得到实际网格垂直方向直线的终点坐标。8.根据权利要求4所述的航空港行李箱搬运系统的控制方法,其特征在于,所述步骤s1中工业相机标定,包括:采用张正友标定算法进行工业相机机内参数标定和畸变校正;采用tsai
‑
lenz标定法进行手眼标定。9.根据权利要求4所述的航空港行李箱搬运系统的控制方法,其特征在于,还包括行李箱的体积的计算与校正:当网格激光照射到目标行李箱上时,工业相机对目标行李箱进行拍照,对拍照的图片上的激光网格进行识别,以行李箱的最远的弯曲的网格线的行李箱的边缘为最远边;计算以最远边行李箱的最上面的一个面的面积,进而估算出行李箱的初步体积;对计算得到的行李箱的体积做边缘扩张填充,边缘填充为在行李箱的最远的弯曲的网格线向外填充总共5cm的灰色边框。
技术总结
本发明公开了一种航空港行李箱搬运系统及其控制方法,包括控制单元、与控制单元信号连接的检测单元和用于运输行李箱的运输单元;控制单元包括控制箱和固定安装于机械臂上、且受控于控制单元的抓手;检测单元包括网格激光、工业相机和压力薄膜传感器;工业相机和网格激光均安装于抓手的顶板上,且工业相机的四周环设有若干个点光源灯;压力薄膜传感器固定安装于抓手的内侧侧壁上;运输单元包括传送带和设置于传送带一侧的运输小车。本发明利用机械臂末端的抓手与周围点光源灯配合工业相机结合机器视觉中的物体检测,对行李箱进行尺寸及体积的估计,机械臂控制抓手去抓取行李箱放至行李箱搬运小车上。至行李箱搬运小车上。至行李箱搬运小车上。
技术研发人员:祝会龙 张静 刘满禄 单毛毛 田凤莲 王姮 张华 段淇昱 周建 白克强
受保护的技术使用者:西南科技大学
技术研发日:2021.08.05
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。