1.本发明涉及焊接技术领域,特别涉及一种焊接方法和多机器人焊接工作站。
背景技术:
2.目前,在船舶建造过程中,在加工车间进行小组立件焊接。小组立件是指在一个底板上,安装多个横纵加强筋,增强工件的强度。这些加强筋的端头形式多样,需要通过气体保护焊焊接和底板连接;船舶建造工艺要求,加强筋的端部也需要和底板焊接,加强筋端部和底板焊缝,以及从端部过渡到正常水平角焊缝的焊缝定义为水平角焊缝包角焊接,该部分焊接要求连续焊接,不能间断,减少焊接缺陷的产生。
3.水平角焊缝包角焊接,目前多为手工焊接,在焊接过程中,焊枪随着焊缝位置的变化,逐渐变化角度,焊枪指向位置要求严格,对人员技能要求高。在机器人自动化焊接中,由于加强筋包角位置形状多变,机器人焊枪、手臂的尺寸大,容易发生干涉,尤其存在焊接过程不连续,需要搭接焊,起弧、收弧的次数多,焊接质量差的问题。
技术实现要素:
4.针对上述问题,本发明的目的在于提供一种焊接方法和多机器人焊接工作站,以解决现有机器人自动化焊接中,由于加强筋包角位置形状多变,存在焊接过程不连续,需要搭接焊,起弧、收弧的次数多,焊接质量差的问题。
5.为了实现上述目的,本发明采用以下技术方案:
6.本发明的一实施例提供的一种焊接方法,包括如下步骤:
7.在自动焊接中,焊枪ⅰ在加强筋侧部,焊枪ⅱ在加强筋的端部;起弧点在加强筋的一底部角点两侧且等距,起弧点与加强筋之间留有缝隙;
8.焊枪ⅰ和焊枪ⅱ同时到达起弧点,同时从起弧点引弧,电弧引燃后,向加强筋的一底部角点移动,在加强筋的底部角点处形成角部起始共熔池后,焊枪ⅰ和焊枪ⅱ同时停顿;然后焊枪ⅰ和焊枪ⅱ同时从底部角点向两侧移动至起弧点位置,完成水平角焊缝包角焊接;
9.焊枪ⅰ和焊枪ⅱ经过起弧点位置继续向前运动同时施焊,施焊路径沿加强筋与底板和立板之间的焊缝移动;焊枪ⅰ和焊枪ⅱ同时到达加强筋的顶部角点处形成角部终止共熔池后,焊枪ⅰ和焊枪ⅱ同时停顿;
10.焊枪ⅰ和焊枪ⅱ同时熄弧,由焊枪ⅰ完成的第一路径焊缝和由焊枪ⅱ完成的第二路径焊缝形成封闭焊缝。
11.在一种可能的实现方式中,所述第一路径焊缝包括依次连接的第一路径平角焊缝、第一路径立焊缝及第一路径平焊缝,其中第一路径平角焊缝为加强筋一侧底部和底板之间的水平焊缝;第一路径立焊缝为加强筋后端一侧和立板之间的立焊缝;第一路径平焊缝为加强筋顶部与立板之间的水平焊缝。
12.所述第二路径焊缝包括依次连接的第二路径平角焊缝、第二路径平焊缝及第二路径立焊缝,其中第二路径平角焊缝为加强筋前端底部与底板之间的水平焊缝;第二路径平
焊缝为加强筋另一侧底部与底板之间的水平焊缝;第二路径立焊缝为加强筋后端另一侧与立板之间的立焊缝。
13.在一种可能的实现方式中,所述第一路径焊缝和所述第二路径焊缝均为空间轨迹焊缝且长度相等。
14.在一种可能的实现方式中,所述焊枪ⅰ和所述焊枪ⅱ在加强筋的底部角点处形成角部起始共熔池及在顶部角点处形成角部终止共熔池后,焊枪ⅰ和焊枪ⅱ同时停顿20
‑
10000毫秒。
15.在一种可能的实现方式中,所述焊枪ⅰ和所述焊枪ⅱ分别由两台焊接机器人带动移动。
16.本发明的另一实施例提供的一种实现所述的焊接方法的多机器人焊接工作站,包括:
17.一组或两组直线模组,设置于底板的一侧或两侧,直线模组具有沿底板的长度方向运动的自由度;
18.滑板,设置于组直线模组上;
19.至少一组焊接机器人系统,每组焊接机器人系统包括焊接机器人ⅰ和焊接机器人ⅱ,焊接机器人ⅰ和焊接机器人ⅱ安装在滑板上,且执行末端分别安装有焊枪ⅰ和焊枪ⅱ。
20.在一种可能的实现方式中,所述滑板为t型结构,所述焊接机器人ⅰ和所述焊接机器人ⅱ倒挂在所述滑板的顶部两侧。
21.在一种可能的实现方式中,所述焊接机器人ⅰ和所述焊接机器人ⅱ均为六自由度垂直多关节型焊接机器人。
22.在一种可能的实现方式中,所述焊接机器人ⅰ带动焊枪ⅰ在加强筋的一侧沿空间轨迹运动,形成第一路径焊缝;所述焊接机器人ⅱ带动焊枪ⅱ在加强筋的另一侧沿空间轨迹运动,形成第二路径焊缝,第一路径焊缝和第二路径焊缝具有加强筋角部起始共熔池和加强筋角部终止共熔池,从而形成闭环焊缝。
23.本发明的优点及有意效果是:
24.1.本发明的整个焊接过程连续,减少了搭接焊,起弧、收弧的次数少,实现不间断的连续焊接,保证焊接质量,符合船舶建造工艺的要求;
25.2.由于本发明选择起始共熔池点和终止共熔池点,为焊缝之间的拐点。因此,便于焊接机器人的空间定点变姿态与合适的焊接工艺参数匹配。减少了焊枪与工件干涉,扩大了自动焊接的覆盖范围,并且极大的简化了示教工作量;
26.3.本发明通过加强筋角部起始共熔池点和加强筋角部终止共熔池点,保证热包角焊接全过程中间无搭接点,熔池的融化状态时间长,铁水流动性好,气体逃逸时间长,保证焊接质量,实现无冷接头的焊接,可以热接头焊接。
27.4、本发明的引弧点为焊缝过程路径,热包角焊接过程中重新融化了引弧点,对起弧点重新融化减少了起弧缺弧坑的出现,提高了焊接质量。
28.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
29.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
30.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
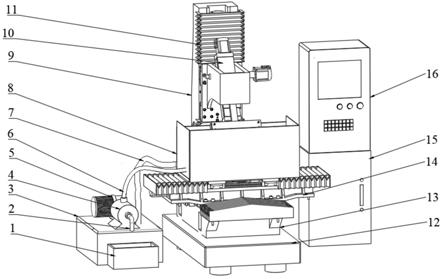
31.图1为本发明实施例中一种多机器人焊接工作站的轴测图;
32.图2为本发明实施例中一种多机器人焊接工作站的主视图;
33.图3为图2的俯视图;
34.图4为图3中i处放大图;
35.图5为本发明实施例中焊接工件的示意图;
36.图中:1、底板,2、立板,3、直线模组,4、滑板,5、焊接机器人系统ⅰ,6、焊接机器人系统ⅱ,7、焊接机器人系统ⅲ,8、焊接机器人系统ⅳ,9、加强筋,10、第一路径平角焊缝,11、第一路径立焊缝,12、第一路径平焊缝,13、第二路径平角焊缝,14、第二路径平焊缝,15、第二路径立焊缝15。
具体实施方式
37.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
38.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
39.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
40.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
41.本发明一实施例提供的一种焊接方法,整个焊接过程连续,减少了搭接焊,起弧、收弧的次数少,实现不间断的连续焊接,保证焊接质量,符合船舶建造工艺的要求。参见图1至图4所示,该焊接方法,包括如下步骤:
42.在自动焊接中,焊枪ⅰ在加强筋9侧部,焊枪ⅱ在加强筋9的端部;起弧点在加强筋9的一底部角点a两侧且等距,起弧点与加强筋9之间留有缝隙;
43.焊枪ⅰ和焊枪ⅱ同时到达起弧点,同时从起弧点引弧,电弧引燃后,向加强筋9的一底部角点a移动,在加强筋9的底部角点a处形成角部起始共熔池后,焊枪ⅰ和焊枪ⅱ同时停顿;然后焊枪ⅰ和焊枪ⅱ同时从底部角点a向两侧移动至起弧点位置,完成水平角焊缝包角焊接;
44.焊枪ⅰ和焊枪ⅱ经过起弧点位置继续向前运动同时施焊,施焊路径沿加强筋9与底板1和立板2之间的焊缝移动;焊枪ⅰ和焊枪ⅱ同时到达加强筋9的顶部角点b处形成角部终止共熔池后,焊枪ⅰ和焊枪ⅱ同时停顿;
45.焊枪ⅰ和焊枪ⅱ同时熄弧,由焊枪ⅰ完成的第一路径焊缝和由焊枪ⅱ完成的第二路径焊缝形成封闭焊缝。
46.参见图4
‑
5所示,第一路径焊缝和第二路径焊缝均为空间轨迹焊缝且长度相等。具体地,第一路径焊缝包括依次连接的第一路径平角焊缝10、第一路径立焊缝11及第一路径平焊缝12,其中第一路径平角焊缝10为加强筋9一侧底部和底板1之间的水平焊缝;第一路径立焊缝11为加强筋9后端一侧和立板2之间的立焊缝;第一路径平焊缝12为加强筋9顶部与立板2之间的水平焊缝。
47.具体地,第二路径焊缝包括依次连接的第二路径平角焊缝13、第二路径平焊缝14及第二路径立焊缝15,其中第二路径平角焊缝13为加强筋9前端底部与底板1之间的水平焊缝;第二路径平焊缝14为加强筋9另一侧底部与底板1之间的水平焊缝;第二路径立焊缝15为加强筋9后端另一侧与立板2之间的立焊缝。
48.进一步地,焊枪ⅰ和焊枪ⅱ在加强筋9的底部角点a处形成角部起始共熔池及在顶部角点b处形成角部终止共熔池后,焊枪ⅰ和焊枪ⅱ同时停顿20
‑
10000毫秒,停顿的时间根据包角位置焊角高度确定。
49.本发明的实施例中,焊枪ⅰ和焊枪ⅱ分别由两台焊接机器人带动移动。通过加强筋角部起始共熔池点和加强筋角部终止共熔池点,保证热包角焊接全过程中间无搭接点,熔池的融化状态时间长,铁水流动性好,气体逃逸时间长,保证焊接质量,实现无冷接头的焊接,可以热接头焊接。另一方面,引弧点为焊缝过程路径,热包角焊接过程中重新融化了引弧点,对起弧点重新融化避免了起弧弧坑的出现,提高了焊接质量。
50.参见图1至4所示,基于本发明的设计构思,本发明的另一实施例提供了一种实现上述焊接方法的多机器人焊接工作站,包括:
51.一组或两组直线模组3,设置于底板1的一侧或两侧,直线模组3具有沿底板1的长度方向运动的自由度;
52.滑板4,设置于组直线模组3上;
53.至少一组焊接机器人系统,每组焊接机器人系统包括焊接机器人ⅰ和焊接机器人ⅱ,焊接机器人ⅰ和焊接机器人ⅱ安装在滑板4上,且执行末端分别安装有焊枪ⅰ和焊枪ⅱ。
54.进一步地,滑板4为t型结构,焊接机器人ⅰ和焊接机器人ⅱ倒挂在滑板4的顶部两侧。优选地,焊接机器人ⅰ和焊接机器人ⅱ均为六自由度垂直多关节型焊接机器人。直线模组3可采用齿轮齿条导轨机构,也可采用其它任何一种能实现直线运动的形式,在此不做限定。
55.自动化焊接过程中,焊接机器人ⅰ带动焊枪ⅰ在加强筋9的一侧沿空间轨迹运动,形成第一路径焊缝;焊接机器人ⅱ带动焊枪ⅱ在加强筋9的另一侧沿空间轨迹运动,形成第二路径焊缝,第一路径焊缝和第二路径焊缝具有加强筋角部起始共熔池和加强筋角部终止共熔池,从而形成闭环焊缝,即为热包角连续焊接焊缝。热包角连续焊接焊缝为空间连续焊缝,而非平面焊缝。
56.本实施例中,底板1的两侧设有两组直线模组3,各直线模组3上均连接有已滑板4,
其中一侧滑板4上安装有焊接机器人系统ⅰ5和焊接机器人系统ⅱ6,另一侧滑板4上安装有焊接机器人系统ⅲ7和焊接机器人系统ⅳ8,参见图3所示,通过采用多机器人模式实现多个加强筋的热包角焊接,提高工作效率。
57.本发明提供的焊接方法,同时完成加强筋的水平角焊缝包角和立焊缝包角焊接工艺,适用船舶建造过程小组立焊接,使用气体保护焊,进行自动焊接,完成底板1、立板2与加强筋9的热包角焊接。
58.本发明由两台焊接机器人带动两把焊枪,同时从角点,引弧,带动焊枪,形成热包角空间焊接,焊缝饱满,焊缝尺寸满足要求。本发明的焊接方法减少了搭接焊,起弧,收弧的次数少,减少了焊枪与工件的干涉,尤其是加强筋,扩大了自动焊接的覆盖范围,并且极大的简化了示教工作量;本发明适用范围广泛,容易实现自动化焊接,对工件组对要求较宽松,提高了焊接质量和工作效率。
59.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。