1.本发明涉及喷涂机器人领域,更具体地说是一种能够吸附在建筑物外墙壁上并爬行、具有防风能力的高层建筑喷涂机器人。
背景技术:
2.为了消除建筑安全隐患和提高城市生态质量,《建筑装饰装修工程质量验收标准》中规定,禁止高层建筑外墙使用瓷砖、马赛克等容易脱落的材料进行装饰,提倡应用仿真石涂料及乳胶漆等进行涂覆。目前,针对高层建筑外墙壁面的喷涂主要采用传统的吊篮作业模式,喷涂人员搭乘吊篮进行高空作业,这种作业模式安全系数低,劳动强度大,喷涂效率低;且二次喷涂施工繁琐,同时,涂料的毒害极大地威胁工人健康。
3.中国专利cn109898811a、公开日20190618,其公开了一种高层建筑外墙喷涂机器人,该机器人本体的下端固定连接四个三轴机械臂,每个三轴机械臂的下端固定连接有吸附机构,吸附机构外壳下端的橡胶密封圈与墙面接触。实际应用中,其仅仅依赖吸附机构吸附在建筑物的外墙存在可靠性问题,当风速较大或在爬壁行走时,机器人容易从高空跌落,虽在机器人本体侧壁上设置有可适时开启的气囊盒,但不慎跌落时,仍然可能摔坏机器人或砸损物品。
4.中国专利cn206436255u、公开日20170825,其公开了一种高层建筑外墙喷涂智能机器人,该机器人的吊篮两端由自动升降机构的吊篮牵引索相连接,吊篮牵引索连接在高层建筑外墙楼顶的吊臂上,开启电机控制通过牵引索使吊篮升降。实际应用中,机器人上吊篮及其内部机构仅由牵引索与楼顶机构相连接,在有风的天气中,高空中的吊篮产生晃动,安全性大大降低;即使在无风的天气里,当气雾喷枪垂直墙面喷涂时,因存在反冲力,吊篮同样会发生晃动。这种不稳定状态不仅带来安全隐患,也会影响喷涂质量,还会造成涂料的浪费。
5.中国专利cn109736546a、公开日20190510,其公开了一种用于外墙面刮灰、喷涂、清洗的模块化多功能机器人,由基座控制机器人和作业机器人两部分构成。其基座控制机器人通过伸缩的吊装支架,在缆绳控制下负责作业机器人的位置移动;其作业机器人根据传感器的检测在需要施工区域进行施工作业。但实际应用中,作业机器人在升降过程和工作过程中与墙面均无联系,没有抗风能力,风力作用下的作业机器人会在空中晃动,十分危险;作业机器人与墙面间没有支撑,风吹或者喷涂反冲力会导致作业机器人与墙面发生碰撞。
6.中国专利cn109162431a、公开日20190108,其公开了一种高楼墙面喷涂机器人,包括卷扬机、电动线缆收放器、楼顶移动吊车、全景摄像头、风速仪、遥控装置、绳索、电缆线等;卷扬机和电动线缆收放器都安装在楼顶移动吊车上面,卷扬机通过绳索连接着喷涂装置,喷涂装置的上侧与清灰装置等连接在一起;清灰装置上的涵道风扇产生墙面附着力,并且抵抗横向来风,保持整体的稳定;设有充气轮,随着卷扬机提升而运动,来保证立面行走时的方向,可以减震或越过低高度的障碍。在实际应用中,该机器人存在以下问题:起支撑
和导向作用的充气轮与卷扬机控制的绳索之间没有配合行走;充气轮被动转动,在下放过程中,充气轮转动与绳索移动很难同步,绳索或松弛或受到拉力,使机器人运行速度不稳定,导致喷涂不均匀;依靠涵道风扇产生墙面附着力并不可靠,吸附力不足,抗风效果差。
技术实现要素:
7.本发明是为避免上述现有技术所存在的不足,提供一种具有良好的抗风能力、安全系数高、作业灵活性高、能实现自动化操作的一种高层建筑外墙智能喷涂机器人,在保障安全的同时,提高喷涂的质量和效率。
8.本发明为实现发明目的采用如下技术方案:
9.本发明高层建筑外墙智能喷涂机器人,由上机体和下机体构成,其特点是:上机体利用夹具机构固定在建筑物顶部,下机体通过行走机构上的吸附足吸附在建筑物外墙壁面上;
10.在所述上机体中设置卷扬机构,所述卷扬机构包括闭环卷扬电机、盘形联轴器、卷筒、卷筒轴、轴承座和卷扬机构基座;安装在卷扬机构基座上的闭环卷扬电机通过盘形联轴器连接卷筒轴,用于驱动卷筒的旋转;所述夹具机构是由副夹块配合主夹块以夹持的方式固定在建筑楼顶女儿墙的转角处;上机体中的卷扬机构基座通过螺栓组紧固在主夹块的外延平台上,钢丝绳一端缠绕在卷筒上,另一端依次绕过安装在副夹块前端的第一定滑轮和第二定滑轮,连接到下机体对应一侧的吊耳上;在建筑物的顶端布置两套呈镜像对称的上机体,通过钢丝绳从两侧牵引下机体,起到安全与辅助运动的作用;
11.所述下机体的结构形式:以外壳体为机架,所述行走机构设置在外壳体朝向墙壁的一侧,在外壳体背离墙壁的一侧安装五轴机械臂;
12.行走机构由中间行走机构、底部行走机构和滑轨连接台组成;中间行走机构和底部行走机构均以滑轨连接台为基座形成滑动配合的“十”字联接,使所述中间行走机构能够在滑轨连接台上在横向伺服电机驱动下呈水平沿横向移动,底部行走机构能够在滑轨连接台上在竖向伺服电机驱动下沿竖向移动;在中间行走机构和底部行走机构的两端各设置一对吸附足,下机体能够利用吸附足实现在建筑物外墙壁面上的附着与移动;
13.所述五轴机械臂是具有五个自由度的喷枪机械臂,由依次连接的机械臂底座、机械臂基座、大臂、小臂和手部构成,在手部上安装带工作头的喷枪,带动喷枪实现三维空间的喷涂作业。
14.本发明高层建筑外墙智能喷涂机器人的特点也在于:
15.在所述夹具机构中,通过伺服电机配合伺服电机联轴器驱动夹具螺旋丝杆旋转,由此带动副夹块和主夹块之间的相对移动,实现夹紧固定功能;
16.在所述副夹块的尾端重块上设置夹具调节机构,包括电动推杆和盘形推杆头,盘形推杆头紧固在楼顶墙壁内侧,驱动电动推杆用于调节副夹块的前端伸出外墙壁面的距离。
17.本发明高层建筑外墙智能喷涂机器人的特点也在于:
18.在所述卷扬机构中,卷扬机构基座通过螺栓组紧固在主夹块的延伸平台上;
19.所述第一定滑轮和第二定滑轮分别安装在各自的滑轮架上,滑轮架安装在副夹块的前端,利用第一定滑轮实现钢丝绳在水平方向上的转向,利用第二定滑轮实现钢丝绳在
竖直方向上的转向。
20.本发明高层建筑外墙智能喷涂机器人的特点也在于:
21.所述中间行走机构是在中间滑轨座的两端分别呈“t”形连接用于安装吸附足的上导轨吸附足固定板,在中间滑轨座的一端端板上设置横向伺服电机,由横向伺服电机驱动横向丝杆转动,配合设置横向丝杆螺母,利用丝杆螺母机构带动中间行走机构的横向移动;
22.所述底部行走机构是在底部滑轨座的两端分别呈“t”形连接用于安装吸附足的下导轨吸附足固定板,在底部滑轨座的一端端板上设置竖向伺服电机,由竖向伺服电机驱动竖向丝杆转动,配合设置竖向丝杆螺母,利用丝杆螺母机构带动底部行走机构的竖向移动;
23.本发明高层建筑外墙智能喷涂机器人的特点也在于:
24.所述滑轨连接台有上层结构和下层结构;
25.上层结构是在上层基板上设置上层中心通孔,横向丝杆在上层中心通孔中贯穿,配合设置的横向丝杆螺母固定安装在上层中心通孔的端头;在所述上层中心通孔的两侧,位于上层基板的底面成对设置上层滚轮,且与中间滑轨座底部设置的一对平行横向直线轨道的位置相对应,利用上层滚轮与横向直线轨道之间的滚动配合实现中间行走机构的横向导向;
26.下层结构是在下层基板上设置下层中心通孔,竖向丝杆在下层中心通孔中贯穿,配合设置的竖向丝杆螺母固定设置在下层中心通孔的端头;在所述下层中心通孔的两侧,位于下层基板的顶面成对设置下层滚轮,且与底部滑轨座顶部设置的一对平行竖向直线轨道的位置相对应,利用下层滚轮与竖向直线轨道之间的滚动配合实现底部行走机构的竖向导向。
27.所述上层基板和下层基板互为靠背且呈“十”字整体结构;
28.所述上层滚轮是将滑轮通过轴承套装在轴套(61)上,轴套(61)通过螺栓和螺母固定安装在上层基板上;下层滚轮具有与上层滚轮相同的结构。
29.本发明高层建筑外墙智能喷涂机器人的特点也在于:
30.所述外壳体为八边形,四周采用流线型面,全景摄像头安装在外壳体的前端以采集喷涂环境图像,四块风速传感器分别安置在外壳体四周平面的中间位置,用于检测环境风速,四块红外激光传感器分别安置在外壳体四周斜向45
°
方向平面上,用于探测外墙壁面四周障碍物,中间行走机构外侧安装蓄电池与用于收发数据的控制箱;控制箱中安装有六轴姿态传感器,用于检测下机体在墙面上的姿态。
31.本发明高层建筑外墙智能喷涂机器人的特点也在于:
32.在所述五轴机械臂中:
33.机械臂基座的s轴向运动是由s轴伺服电机驱动,机械臂基座的顶端与大臂的末端相接,由此带动喷枪实现s轴向运动;所述机械臂基座的底部安装在机械臂底座上,机械臂底座的底部安装在外壳体背离墙壁的一侧,所述s轴伺服电机安装在机械臂底座上;
34.大臂的l轴向运动是由l轴伺服电机驱动,并通过同步带传动机构控制大臂的l轴向运动;大臂的前端与小臂的末端相接,由此带动喷枪实现l轴向运动;所述l轴伺服电机安装在机械臂基座上;
35.小臂的u轴向运动是由u轴伺服电机驱动,通过同步带传动机构控制小臂的u轴向运动;小臂的前端与手部的末端r轴旋转构件连接,由此带动喷枪实现u轴向运动;所述u轴
伺服电机安装在大臂的前端;
36.手部的r轴向运动是由r轴伺服电机驱动;在手部的前端固定手部摆动轴b轴;手部的b轴向运动是由b轴伺服电机驱动,在手部摆动轴b轴的前端安装喷枪,由此带动喷枪实现b轴向运动;所述r轴伺服电机安装在小臂的末端;所述b轴伺服电机安装在手部上。
37.本发明高层建筑外墙智能喷涂机器人的特点也在于:按如下过程控制机械人上下移动:
38.步骤1:所有吸附足为负压,下机体吸附在建筑物外墙壁面上,呈定位状态;
39.步骤2:将中间行走机构的吸附足与外墙壁面松开,保持底部行走机构的吸附足与外墙壁面吸合,竖向伺服电机正转驱动,使中间行走机构相对于底部行走机构上移至顶部;再重新使中间行走机构的吸附足与外墙壁面吸合,恢复为定位状态;
40.步骤3:保持中间行走机构的吸附足与外墙壁面吸合,底部行走机构的吸附足与外墙壁面松开,竖向伺服电机反转驱动,使底部行走机构相对于中间行走机构上移至顶部,再重新使底部行走机构的吸附足与外墙壁面吸合,恢复为定位状态;
41.由步骤1
‑
步骤3完成下机体在外墙壁面上向上移动一个步伐;重复步骤1到步骤3直至下机体向上移动在设在设定的位置上的;以相应的方式能够实现下机体的向下移动、以及左右移动。
42.与已有技术相比,本发明有益效果体现在:
43.1、本发明采用上机体与下机体协同配合的工作方式,使喷涂机器人获得良好的防风能力与较高的安全系数,多自由度的喷枪机械臂能够在三维空间内灵活地完成喷涂作业,有效提高了喷涂的质量和效率;
44.2、本发明中下机体在工作时,由四对吸附足均吸牢在外墙壁上,同时由两侧上机体的钢丝绳牵引,有效保证了机器人在工作过程中的抗风能力和稳定性;在下机体移动的过程中,至少有两对吸附足与外墙壁吸合,同时下机体由两侧钢丝绳牵引,保证了机器人移动过程中的平稳性;下机体在喷枪机械臂进行喷涂作业的过程中,所有吸附足均与外墙壁吸合,同时有两侧钢丝绳牵引,能够抵抗喷枪在垂直于墙面喷涂的过程中所受到的反冲作用力,有效保证了机器人在工作过程中的抗风能力,提高了安全性、可靠性、稳定性,在很大程度上保证了喷涂质量与效率;
45.3、本发明中下机体行走的过程中中间行走机构与底部行走机构上的吸附足与外墙壁面交替吸附,保证了防风能力的同时具备一定的越障能力;
46.4、本发明中两侧的上机体上搭载卷扬机构,其通过单根钢丝绳从两侧牵引机器主体,且两套设备的工作状态同步,有效保障下机体的工作稳定,避免下机体的姿态失稳;下机体通过机器视觉系统采集周围的墙面工作环境,在检测到有窗台、阳台、墙缝等非平整墙面环境状况后,下机体能够进行特定标记并调整喷涂作业的路径规划,实现智能化作业;
47.5、本发明中下机体上搭载全景摄像头、多种传感器、蓄电池、控制箱及手持控制器等,无需工人进入吊篮,可实现远程无线控制与智能自动化控制,有效提高了机器人的可靠性、安全性、稳定性、实用性。
48.6、本发明中下机体的外壳体形状呈八边形,四周采用流线型面设计减小风阻,能够有效抵抗各向来风,提高下机体在建筑物墙面上工作的稳定性;
附图说明
49.图1为本发明喷涂机器人整体结构示意图;
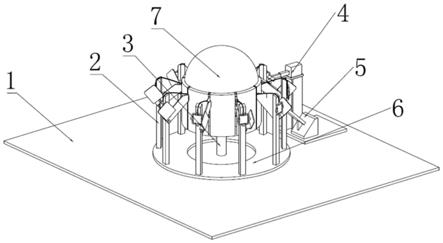
50.图2为本发明喷涂机器人中上机体结构示意图;
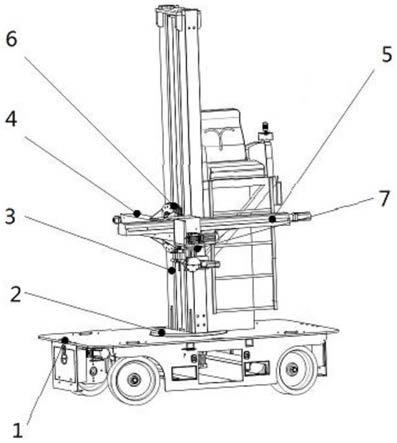
51.图3为本发明喷涂机器人中下机体结构示意图;
52.图4为本发明喷涂机器人中行走机构结构示意图;
53.图5为本发明喷涂机器人中五轴机械臂结构示意图;
54.图6为本发明喷涂机器人中滑轨连接台结构示意图。
55.图中标号:1上机体,2下机体,3外墙壁面,4钢丝绳,5女儿墙,6行走机构,7五轴机械臂,8中间行走机构,9底部行走机构,10滑轨连接台,11吸附足,12夹具机构,13卷扬机构,14副夹块,15主夹块,16夹具调节机构,17电动推杆,18盘形推杆头,19闭环卷扬电机,20盘形联轴器,21卷筒,22卷筒轴,23轴承座,24卷扬机构基座,25夹具螺旋丝杆,26伺服电机固定座,27伺服电机,28伺服电机联轴器,29第一定滑轮,30第二定滑轮,31滑轮架,32全景摄像头,33红外激光传感器,34风速传感器,35外壳体,36吊耳,37中间滑轨座,38底部滑轨座,39蓄电池,40控制箱,41横向伺服电机,42竖向伺服电机,43下导轨吸附足固定板,44上导轨吸附足固定板,45竖向丝杆,47喷枪,48手部,49小臂,50大臂,51机械臂基座,52机械臂底座,53为s轴伺服电机,54为l轴伺服电机,55为u轴伺服电机,56为r轴伺服电机,57为b轴伺服电机,58交叉滑块,59滑轮,60轴承,61轴套,62真空吸盘,63推杆,64推杆电机,65左侧吊耳,66右侧吊耳,67第一横向直线轨道,68第二横向直线轨道,69第一竖向直线轨道,70第二竖向直线轨道,71中间行走机构第一吸附足,72中间行走机构第二吸附足,73中间行走机构第三吸附足,74中间行走机构第四吸附足,75底部行走机构第一吸附足,76底部行走机构第二吸附足,77底部行走机构第三吸附足,78底部行走机构第四吸附足。
具体实施方式
56.参见图1、图2和图3,本实施例中高层建筑外墙智能喷涂机器人由上机体1和下机体2构成,上机体1以夹具机构12为主机架,利用夹具机构12固定在建筑物顶部,下机体2通过行走机构6上的吸附足11吸附在建筑物外墙壁面3上;下机体2在二维平面自由移动的同时,一左一右两座上机体1上搭载的两套卷扬机构13用于控制钢丝绳4的伸缩,进而辅助下机体2在平面上的移动。
57.如图1、图2和图3所示,在上机体1中设置卷扬机构13,卷扬机构13包括闭环卷扬电机19、盘形联轴器20、卷筒21、卷筒轴22、轴承座23和卷扬机构基座24;安装在卷扬机构基座24上的闭环卷扬电机19通过盘形联轴器20连接卷筒轴22,用于驱动卷筒21的旋转;夹具机构12是由副夹块14配合主夹块15以夹持的方式固定在建筑楼顶女儿墙5的转角处;上机体1中的卷扬机构基座24通过螺栓组紧固在主夹块15的外延平台上,钢丝绳4一端缠绕在卷筒21上,另一端依次绕过安装在副夹块14前端的第一定滑轮29和第二定滑轮30,连接到下机体2对应一侧的吊耳36上;在建筑物的顶端布置两套呈镜像对称的上机体1,通过钢丝绳4从两侧牵引下机体2,下机体2上两只吊耳按一左一右分设为左侧吊耳65和右侧吊耳66,两侧对称牵引起到保证安全与辅助运动的作用。
58.如图1和图3所示,下机体2的结构形式:以外壳体35为机架,行走机构6设置在外壳体朝向墙壁的一侧,在外壳体背离墙壁的一侧安装五轴机械臂7。
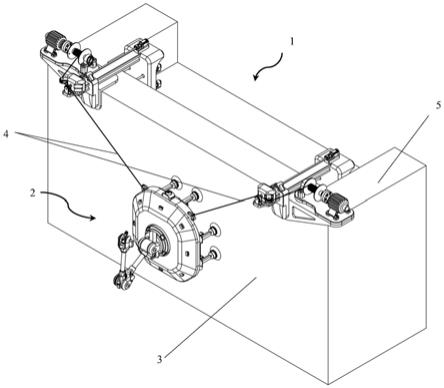
59.如图3和图4所示,行走机构6为x
‑
y两维机构,由中间行走机构8、底部行走机构9和滑轨连接台10组成;中间行走机构8和底部行走机构9均以滑轨连接台10为基座形成滑动配合的“十”字联接,使中间行走机构8能够在滑轨连接台10上在横向伺服电机驱动下呈水平沿横向移动,底部行走机构9能够在滑轨连接台10上在竖向伺服电机驱动下沿竖向移动;在中间行走机构8和底部行走机构9的两端各设置一对吸附足11,下机体2能够利用吸附足11实现在建筑物外墙壁面3上的附着与移动。
60.图4示出了同在中间行走机构8左端的中间行走机构第一吸附足71和中间行走机构第二吸附足72,以及同在中间行走机构右端的中间行走机构第三吸附足73和中间行走机构第四吸附足74,中间行走机构8能够利用各吸附足附着在外墙壁面3上;图4还示出了同在底部行走机构9一端的底部行走机构第一吸附足75和底部行走机构第二吸附足76,以及同在底部行走机构另一端的底部行走机构第三吸附足77和底部行走机构第四吸附足78;底部行走机构9能够利用各吸附足附着在外墙壁面3上;具体实施中,吸附足由真空吸盘62、推杆63和推杆电机64组成,推杆电机64控制推杆63的伸缩,设置真空泵控制真空吸盘62产生负压或解除负压,以控制其与外墙壁3之间的吸合或松开。
61.如图3和图5所示,五轴机械臂7是具有五个自由度的喷枪机械臂,由依次连接的机械臂底座52、机械臂基座51、大臂50、小臂49和手部48构成,在手部48上安装带工作头的喷枪47,带动喷枪47实现三维空间的喷涂作业。
62.具体实施中,相应的技术措施也包括:
63.如图2所示,在夹具机构12中,通过伺服电机27配合伺服电机联轴器28驱动夹具螺旋丝杆25旋转,由此带动副夹块14和主夹块15之间的相对移动,实现夹紧固定功能,伺服电机27是利用伺服电机固定座26固定设置在副夹块14的尾部;在副夹块14的尾端重块上设置夹具调节机构16,包括电动推杆17和盘形推杆头18,盘形推杆头18紧固在楼顶墙壁内侧,驱动电动推杆17用于调节副夹块14的前端伸出外墙壁面3的距离;在卷扬机构13中,卷扬机构基座24通过螺栓组紧固在主夹块15的延伸平台上;第一定滑轮29和第二定滑轮30分别安装在各自的滑轮架31上,滑轮架31安装在副夹块14的前端,利用第一定滑轮29实现钢丝绳4在水平方向上的转向,利用第二定滑轮30实现钢丝绳4在竖直方向上的转向。
64.如图4所示,中间行走机构8是在中间滑轨座37的两端分别呈“t”形连接用于安装吸附足的上导轨吸附足固定板44,在中间滑轨座37的一端端板上设置横向伺服电机41,由横向伺服电机41驱动横向丝杆转动,配合设置横向丝杆螺母,利用丝杆螺母机构带动中间行走机构8的横向移动;底部行走机构9是在底部滑轨座38的两端分别呈“t”形连接用于安装吸附足的下导轨吸附足固定板43,在底部滑轨座38的一端端板上设置竖向伺服电机42,由竖向伺服电机42驱动竖向丝杆45转动,配合设置竖向丝杆螺母,利用丝杆螺母机构带动底部行走机构9的竖向移动;
65.如图4和图6所示:滑轨连接台10有上层结构和下层结构;上层结构是在上层基板上设置上层中心通孔,横向丝杆在上层中心通孔中贯穿,配合设置的横向丝杆螺母固定安装在上层中心通孔的端头;在上层中心通孔的两侧,位于上层基板的底面成对设置上层滚轮,且与中间滑轨座37底部设置的一对平行横向直线轨道的位置相对应,图4中所示的一对平行横向直线轨道分别为第一横向直线轨道67和第二横向直线轨道68,利用上层滚轮与横向直线轨道之间的滚动配合实现中间行走机构8的横向导向;下层结构是在下层基板上设
置下层中心通孔,竖向丝杆45在下层中心通孔中贯穿,配合设置的竖向丝杆螺母固定设置在下层中心通孔的端头;在下层中心通孔的两侧,位于下层基板的顶面成对设置下层滚轮,且与底部滑轨座38顶部设置的一对平行竖向直线轨道的位置相对应,图4中所示的一对平行竖向直线轨道分别是第一竖向直线轨道69和第二竖向直线轨道70,利用下层滚轮与竖向直线轨道之间的滚动配合实现底部行走机构9的竖向导向。
66.图6所示的上层基板和下层基板58互为靠背且呈“十”字整体结构;上层滚轮是将滑轮59通过轴承60套装在轴套61上,轴套61通过螺栓和螺母固定安装在上层基板上;下层滚轮具有与上层滚轮相同的结构。
67.图3所示的外壳体35为八边形,四周采用流线型面以减小环境风力的影响,全景摄像头32安装在外壳体35的前端以采集喷涂环境图像,四块风速传感器34分别安置在外壳体35四周平面的中间位置,用于检测环境风速,四块红外激光传感器33分别安置在外壳体35四周斜向45
°
方向平面上,用于探测外墙壁面3四周障碍物。
68.图4所示的中间行走机构8外侧安装蓄电池39与用于收发数据的控制箱40;控制箱40中安装有六轴姿态传感器,用于检测下机体2在墙面上的姿态;在手持控制器与控制箱40建立无线或有线的通信方式,操作者立于楼顶或地面,利用手持控制器实现对喷涂机器人的智能控制。
69.图5所示的五轴机械臂7中包括:
70.机械臂基座51的s轴向运动是由s轴伺服电机53驱动,机械臂基座51的顶端与大臂50的末端相接,由此带动喷枪47实现s轴向运动;机械臂基座51的底部安装在机械臂底座52上,机械臂底座52的底部安装在外壳体35背离墙壁的一侧,s轴伺服电机53安装在机械臂底座52上;
71.大臂50的l轴向运动是由l轴伺服电机54驱动,并通过同步带传动机构控制大臂50的l轴向运动;大臂50的前端与小臂49的末端相接,由此带动喷枪47实现l轴向运动;l轴伺服电机54安装在机械臂基座51上;
72.小臂49的u轴向运动是由u轴伺服电机55驱动,通过同步带传动机构控制小臂的u轴向运动;小臂49的前端与手部48的末端r轴旋转构件连接,由此带动喷枪47实现u轴向运动;u轴伺服电机55安装在大臂50的前端;
73.手部48的r轴向运动是由r轴伺服电机56驱动;在手部48的前端固定手部摆动轴b轴;手部48的b轴向运动是由b轴伺服电机57驱动,在手部摆动轴b轴的前端安装喷枪,由此带动喷枪47实现b轴向运动;r轴伺服电机56安装在小臂49的末端;b轴伺服电机57安装在手部48上。
74.本实施例中机器人按如下控制过程进行上下移动:
75.步骤1:所有吸附足11为负压,下机体2吸附在建筑物外墙壁面3上,呈定位状态;
76.步骤2:将中间行走机构8的吸附足与外墙壁面3松开,保持底部行走机构9的吸附足与外墙壁面3吸合,竖向伺服电机42正转驱动,使中间行走机构8相对于底部行走机构9上移至顶部;再重新使中间行走机构8的吸附足11与外墙壁面3吸合,恢复为定位状态;
77.步骤3:保持中间行走机构8的吸附足与外墙壁面3吸合,底部行走机构9的吸附足与外墙壁面3松开,竖向伺服电机42反转驱动,使底部行走机构9相对于中间行走机构8上移至顶部,再重新使底部行走机构9的吸附足11与外墙壁面3吸合,恢复为定位状态;
78.由步骤1
‑
步骤3完成下机体2在外墙壁面3上向上移动一个步伐;重复步骤1到步骤3直至下机体2向上移动在设在设定的位置上的;以相应的方式能够实现下机体2的向下移动、以及左右移动。下机体2在上下左右移动过程中,控制两侧上机体1上的闭环卷扬电机19使两侧钢丝绳4成比例地同步伸缩长短,一方面避免相互干扰,另一方面保持下机体2的稳定移动。
79.本发明也可用于针对高层建筑外墙壁面的清洗作业或墙壁质量的检测作业,应用广泛。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。