1.本发明属于智能仓储技术领域,尤其涉及基于贵重物品运输用小型智能仓储装置。
背景技术:
2.货物储存需要使用到货仓,货仓货物运输和调运需要使用到智能仓储机器人,智能仓储机器人在使用过程中如果出现系统失控,以及驱动轮损坏时,会导致智能仓储机器人乱跑以及发生倾斜的现象发生,无法快速的对智能仓储机器人进行维修和保养,同时由于智能仓储机器人的倾斜可能会导致智能仓储机器人上货物发生倾斜或者倒塌的现象发生,容易造成贵重物品损坏的现象发生。
技术实现要素:
3.本发明提供基于贵重物品运输用小型智能仓储装置,旨在解决无法快速的对智能仓储机器人进行辅助支撑的问题。
4.本发明是这样实现的,基于贵重物品运输用小型智能仓储装置,包括智能仓储机器人、控制立杆和两个支撑机构,其特征在于,所述控制立杆位于所述智能仓储机器人顶部的左侧,两个所述支撑机构分别位于所述智能仓储机器人的前侧和后侧,且与所述智能仓储机器人的表面固定连接;
5.所述控制立杆右侧的底部与所述智能仓储机器人顶部的左侧通过合页活动连接,所述控制立杆左侧的底部设置有限位柱,所述限位柱右侧的前侧和后侧均固定连接有固定块,所述固定块的右侧与所述控制立杆左侧的底部固定连接;
6.所述智能仓储机器人的底部设置有六个驱动轮,所述控制立杆左侧的顶部设置有控制面板,所述控制立杆的顶部固定连接有探测设备。
7.更进一步地,前侧所述支撑机构包括电动气缸、第一固定杆、两个第二固定杆和两个第一限位块,所述电动气缸的后侧与所述智能仓储机器人的前侧固定连接,所述电动气缸的输出端与所述第一固定杆的顶部固定连接,两个所述第二固定杆分别位于第一固定杆的两侧,所述第一固定杆的两端均与所述第二固定杆的表面固定连接,所述第一限位块套设在所述第二固定杆表面的顶部,所述第一限位块的后侧与所述智能仓储机器人前侧的顶部固定连接,所述第二固定杆表面的底部活动连接有支撑块。
8.更进一步地,所述第二固定杆的顶部固定连接有第二限位块,所述第二限位块的底部与所述第一限位块的表面配合使用。
9.更进一步地,所述第二固定杆的底部开设有凹槽,所述第二固定杆内部的凹槽通过转轴与所述支撑块活动连接,所述支撑块的两端呈弧形。
10.更进一步地,所述智能仓储机器人顶部的左侧设置有固定机构,且位于所述控制立杆左侧的底部,所述固定机构包括固定壳、第一固定柱、两个第三固定杆、两个第四固定杆和两个第三限位块,所述固定壳的底部与所述智能仓储机器人顶部的左侧固定连接,所
述第一固定柱位于固定壳内部的底部,且与所述固定壳的内部活动连接,两个所述第三固定杆分别位于所述第一固定柱顶部的前侧和后侧,所述第三固定杆左侧的顶部与所述第四固定杆的右侧固定连接,所述第四固定杆的左侧贯穿所述固定壳并延伸至所述固定壳的左侧,所述第四固定杆的顶部与所述第三限位块底部的左侧固定连接,所述第三限位块的右侧贯穿所述固定壳并延伸至所述固定壳的右侧,所述第三限位块的底部与所述限位柱的表面配合使用。
11.更进一步地,所述固定壳的左侧设置有握杆,所述握杆的右侧与所述第四固定杆的左侧固定连接,所述固定壳的左侧开设有与所述第四固定杆配合使用的第一开口,所述第一固定柱表面的前侧和后侧均套设有限位圈,所述限位圈的表面与所述固定壳的内壁配合使用。
12.更进一步地,所述第三固定杆左侧的顶部固定连接有弧形弹簧,所述弧形弹簧的另一端与所述固定壳内壁的底部固定连接,所述固定壳右侧的顶部开设有与所述第三限位块配合使用的第二开口,所述第三限位块的底部开设有与所述限位柱配合使用的限位凹槽。
13.更进一步地,所述控制立杆右侧的顶部和所述智能仓储机器人右侧的顶部设置有限位机构,所述限位机构包括第二固定柱、固定板、第四限位块和限位板,所述第二固定柱的左侧与所述控制立杆右侧的顶部固定连接,所述固定板套设在所述第二固定柱的表面,且与所述第二固定柱的表面活动连接,所述固定板的底部与所述第四限位块的顶部固定连接,所述限位板的左侧与所述智能仓储机器人右侧的顶部固定连接,所述第四限位块的表面与所述限位板的底部配合使用,所述第二固定柱的右侧固定连接有第五限位块,所述第五限位块的左侧与所述固定板的右侧配合使用。
14.更进一步地,所述固定板左侧的顶部固定连接有柔性立柱,所述柔性立柱的表面与所述控制立杆右侧的顶部配合使用,所述限位板的底部开设有与所述第四限位块配合使用的定位槽。
15.更进一步地,所述控制立杆右侧的顶部开设有与所述柔性立柱配合使用的限位槽,所述限位槽的数量为四个,且均匀分布于所述控制立杆右侧的顶部,所述限位槽环形分布于所述第二固定柱的四周。
16.关于实施本发明的有益技术效果为:
17.1、本发明通过设置两个支撑机构,能够当智能仓储机器人出现驱动轮损坏或者程序错乱,启动电动气缸,电动气缸带动第一固定杆向下移动,第一固定杆带动第二固定杆向下移动,第二固定杆带动支撑块向下移动,进行支撑在地面上,将智能仓储机器人提起,解决无法快速的对智能仓储机器人进行辅助支撑的问题。当需要将智能仓储机器人顶起时,启动电动气缸,电动气缸带动第一固定杆向下移动,第一固定杆带动两侧的第二固定杆向下移动,第二固定杆受到第一限位块的限位,向下移动,第二固定杆带动支撑块向下移动,使支撑块与地面接触,从而达到撑起智能仓储机器人的目的,方便系统的更新以及方便底部的维修,避免智能仓储机器人出现故障乱跑导致货物损坏的现象发生,通过设置第二限位块,能够避免第二固定杆脱离第一限位块的内部,对第二固定杆起到限位的作用,通过设置支撑块,能够更好的和地面接触,适应不同的地形,达到更好的支撑效果。
附图说明
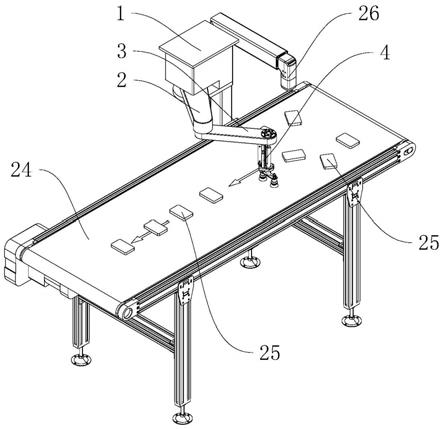
18.图1是本发明提供的结构立体图;
19.图2是本发明提供的结构折叠示意图;
20.图3是本发明提供结构的主视图;
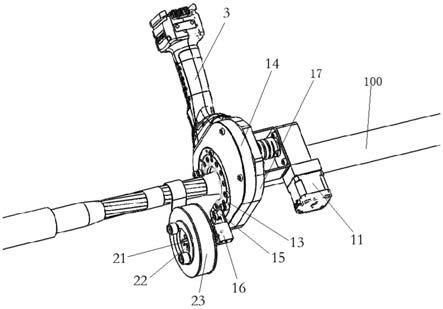
21.图4是本发明提供支撑机构的立体图;
22.图5是本发明提供固定机构的立体图;
23.图6是本发明提供图1中a处的局部放大图;
24.图7是本发明提供图2中b处的局部放大图;
25.图8是本发明提供图3中c处的局部放大图;
26.图9是本发明提供固定壳的立体图;
27.图10是本发明提供第一固定柱的立体图。
28.图中:1、智能仓储机器人;2、控制立杆;3、支撑机构;301、电动气缸;302、第一固定杆;303、第二固定杆;304、第一限位块;305、支撑块;4、固定机构;401、固定壳;402、第一固定柱;403、第三固定杆;404、第四固定杆;405、第三限位块;5、限位机构;501、第二固定柱;502、固定板;503、第四限位块;504、限位板;505、第五限位块;6、合页;7、限位柱;8、固定块;9、驱动轮;10、控制面板;11、探测设备;12、第二限位块;13、握杆;14、第一开口;15、限位圈;16、弧形弹簧;17、第二开口;18、限位凹槽;19、柔性立柱;20、定位槽;21、限位槽。
具体实施方式
29.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
30.实施例一
31.参照图1至图4,基于贵重物品运输用小型智能仓储装置,包括智能仓储机器人1、控制立杆2和两个支撑机构3,控制立杆2位于智能仓储机器人1顶部的左侧,两个支撑机构3分别位于智能仓储机器人1的前侧和后侧,且与智能仓储机器人1的表面固定连接;
32.控制立杆2右侧的底部与智能仓储机器人1顶部的左侧通过合页6活动连接,控制立杆2左侧的底部设置有限位柱7,限位柱7右侧的前侧和后侧均固定连接有固定块8,固定块8的右侧与控制立杆2左侧的底部固定连接;
33.智能仓储机器人1的底部设置有六个驱动轮9,控制立杆2左侧的顶部设置有控制面板10,控制立杆2的顶部固定连接有探测设备11。
34.前侧支撑机构3包括电动气缸301、第一固定杆302、两个第二固定杆303和两个第一限位块304,电动气缸301的后侧与智能仓储机器人1的前侧固定连接,电动气缸301的输出端与第一固定杆302的顶部固定连接,两个第二固定杆303分别位于第一固定杆302的两侧,第一固定杆302的两端均与第二固定杆303的表面固定连接,第一限位块304套设在第二固定杆303表面的顶部,第一限位块304的后侧与智能仓储机器人1前侧的顶部固定连接,第二固定杆303表面的底部活动连接有支撑块305。
35.第二固定杆303的顶部固定连接有第二限位块12,第二限位块12的底部与第一限位块304的表面配合使用,能够对第二固定杆303起到限位的作用,避免第二固定杆303出现
脱离第一限位块304内部的情况发生。
36.第二固定杆303的底部开设有凹槽,第二固定杆303内部的凹槽通过转轴与支撑块305活动连接,支撑块305的两端呈弧形,通过支撑块305弧形的设置,可以使支撑块305更好的跟地面接触,增加结构的稳定性,避免设备的晃动。
37.通过设置支撑机构3,当需要将智能仓储机器人1顶起时,启动电动气缸301,电动气缸301带动第一固定杆302向下移动,第一固定杆302带动两侧的第二固定杆303向下移动,第二固定杆303受到第一限位块304的限位,向下移动,第二固定杆303带动支撑块305向下移动,使支撑块305与地面接触,从而达到撑起智能仓储机器人1的目的,方便系统的更新以及方便底部的维修,避免智能仓储机器人1出现故障乱跑导致货物损坏的现象发生,通过设置第二限位块12,能够避免第二固定杆303脱离第一限位块304的内部,对第二固定杆303起到限位的作用,通过设置支撑块305,能够更好的和地面接触,适应不同的地形,达到更好的支撑效果。
38.实施例二
39.参照图1至图10,基于贵重物品运输用小型智能仓储装置,与实施例1相比,在实施例1的基础上,智能仓储机器人1顶部的左侧设置有固定机构4,且位于控制立杆2左侧的底部,固定机构4包括固定壳401、第一固定柱402、两个第三固定杆403、两个第四固定杆404和两个第三限位块405,固定壳401的底部与智能仓储机器人1顶部的左侧固定连接,第一固定柱402位于固定壳401内部的底部,且与固定壳401的内部活动连接,两个第三固定杆403分别位于第一固定柱402顶部的前侧和后侧,第三固定杆403左侧的顶部与第四固定杆404的右侧固定连接,第四固定杆404的左侧贯穿固定壳401并延伸至固定壳401的左侧,第四固定杆404的顶部与第三限位块405底部的左侧固定连接,第三限位块405的右侧贯穿固定壳401并延伸至固定壳401的右侧,第三限位块405的底部与限位柱7的表面配合使用。
40.固定壳401的左侧设置有握杆13,握杆13的右侧与第四固定杆404的左侧固定连接,固定壳401的左侧开设有与第四固定杆404配合使用的第一开口14,第一固定柱402表面的前侧和后侧均套设有限位圈15,限位圈15的表面与固定壳401的内壁配合使用,能够方便第四固定杆404的移动,避免第四固定杆404的卡死,同时限位圈15能够对第一固定柱402起到限位作用,避免第一固定柱402前后移动,增加第一固定柱402的稳定性。
41.第三固定杆403左侧的顶部固定连接有弧形弹簧16,弧形弹簧16的另一端与固定壳401内壁的底部固定连接,固定壳401右侧的顶部开设有与第三限位块405配合使用的第二开口17,第三限位块405的底部开设有与限位柱7配合使用的限位凹槽18,弧形弹簧16能够方便对第三固定杆403的复位,增加第三固定杆403带动第三限位块405卡紧的能力,同时第二开口17能够方便第三限位块405的移动,避免第三限位块405的卡死,限位凹槽18能够方便第三限位块405卡在限位柱7的表面,避免限位柱7的脱离。
42.通过设置固定机构4,能够通过向下移动握杆13,握杆13带动两个第四固定杆404向下旋转,第四固定杆404带动第三固定杆403围绕第一固定柱402转动,同时第三固定杆403带动第三限位块405转动,使第三限位块405脱离限位柱7的表面,当第三限位块405脱离限位柱7的表面时,转动控制立杆2,使控制立杆2围绕合页6转动,平躺在智能仓储机器人1的顶部,方便智能仓储机器人1的放置,同时减少了智能仓储机器人1占用的空间,通过设置握杆13,能够方便使用者同时按压第四固定杆404,通过设置第一开口14能够方便第四固定
杆404移动,避免第四固定杆404的卡死,通过设置限位圈15,能够避免第一固定柱402出现前后移动的现象,增加第一固定柱402的稳定性,通过设置弧形弹簧16能够方便复位第三固定杆403,通过设置第二开口17能够方便第三固定块8的移动,避免第三固定块8的卡死,限位凹槽18能够方便限位柱7卡在第三限位块405的底部。
43.实施例三
44.参照图1至图10,基于贵重物品运输用小型智能仓储装置,与实施例1相比,在实施例1的基础上,控制立杆2右侧的顶部和智能仓储机器人1右侧的顶部设置有限位机构5,限位机构5包括第二固定柱501、固定板502、第四限位块503和限位板504,第二固定柱501的左侧与控制立杆2右侧的顶部固定连接,固定板502套设在第二固定柱501的表面,且与第二固定柱501的表面活动连接,固定板502的底部与第四限位块503的顶部固定连接,限位板504的左侧与智能仓储机器人1右侧的顶部固定连接,第四限位块503的表面与限位板504的底部配合使用,第二固定柱501的右侧固定连接有第五限位块505,第五限位块505的左侧与固定板502的右侧配合使用。
45.固定板502左侧的顶部固定连接有柔性立柱19,柔性立柱19的表面与控制立杆2右侧的顶部配合使用,限位板504的底部开设有与第四限位块503配合使用的定位槽20,能够更好的对固定板502进行限位,同时定位槽20能够方便对第四限位块503进行限位,从而方便对控制立杆2进行固定。
46.控制立杆2右侧的顶部开设有与柔性立柱19配合使用的限位槽21,限位槽21的数量为四个,且均匀分布于控制立杆2右侧的顶部,限位槽21环形分布于第二固定柱501的四周,能够方便对柔性立柱19进行限位,使柔性立柱19更好的卡在控制立杆2的内部,从而达到对固定板502的限位。
47.通过设置限位机构5,能够当控制立杆2躺在智能仓储机器人1的顶部时,通过转动固定板502,使固定板502围绕第二固定柱501转动,固定板502带动第四限位块503转动,当第四限位块503移动到限位板504的底部时,卡入定位槽20中,使操作立杆2更好的固定在智能仓储机器人1的顶部,减少操作立杆2的晃动,通过设置柔性立柱19,能够方便对固定板502进行固定,从而使第四限位块503卡在限位板504的底部,限位槽21能够对柔性立柱19进行限位,使柔性立柱19固定固定板502更加稳定。
48.工作原理
49.使用时,使用者需要将智能仓储机器人1顶起时,启动电动气缸301,电动气缸301带动第一固定杆302向下移动,第一固定杆302带动两侧的第二固定杆303向下移动,第二固定杆303受到第一限位块304的限位,向下移动,第二固定杆303带动支撑块305向下移动,使支撑块305与地面接触,从而达到撑起智能仓储机器人1的目的,方便系统的更新以及方便底部的维修,避免智能仓储机器人1出现故障乱跑导致货物损坏的现象发生,当需要对智能仓储机器人1进行收纳时,通过向下移动握杆13,握杆13带动两个第四固定杆404向下旋转,第四固定杆404带动第三固定杆403围绕第一固定柱402转动,同时第三固定杆403带动第三限位块405转动,使第三限位块405脱离限位柱7的表面,当第三限位块405脱离限位柱7的表面时,转动控制立杆2,使控制立杆2围绕合页6转动,平躺在智能仓储机器人1的顶部,方便智能仓储机器人1的放置,同时减少了智能仓储机器人1占用的空间,同时转动固定板502,使固定板502围绕第二固定柱501转动,固定板502带动第四限位块503转动,当第四限位块
503移动到限位板504的底部时,卡入定位槽20中,使操作立杆2更好的固定在智能仓储机器人1的顶部,减少操作立杆的晃动,达到对控制立杆2的固定,避免由于控制立杆2的旋转导致上面仪器与其他物体发生碰撞出现损坏的现象发生。
50.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。