一种基于5g边缘计算的水下机器人的控制服务集成方法
技术领域
1.本发明涉及到人工智能领域,尤其是涉及到一种基于5g边缘计算的水下机器人的控制服务集成方法。
背景技术:
2.随着海洋资源的不断开采,水下机器人技术也随之不断发展。水下机器人需要在复杂水域进行任务,需要面对需要未知的因素,如风,浪,流,深水压力等干扰。如洋流,随着时间地点不同,也会有较大的变化。所以水下机器人的控制是水下机器人研究技术的重点。但是很多研究机构或组织受限于环境或资金等因素,无法比较有效的验证所研究的算法。若由远端提供水下机器人实体,其提供的控制服务接入时一般以网关为传输设备,普通4g传输设备在面对此类较大数据量传输且对实时性要求很高的场景,存在负载过大,通信不稳定,延时高等缺点,不能很好的满足远端实时控制的需求。
3.而随着今年5g技术和边缘计算等技术的发展,当前针对此类问题已经能够提供较好的解决思路。即可以通过一种基于5g边缘计算的水下机器人的控制服务集成方法,通过5g的低延时,高带宽等优点不仅大大提高了远程实时控制的性能,并且还可以提升水下机器人在运行过程中的安全性。
技术实现要素:
4.针对现有解决方案中存在的问题,本发明提出了一种基于5g边缘计算的水下机器人的控制服务集成方法,以解决传统方案存在的负责过大,通信不稳定,延时高等缺点,并且可以较好的提升远端控制水下机器人过程中的安全性。同时由于5g边缘计算的优点,使得远端的客户端并不需要实际的水下机器人的实验场地以及建设各种水下机器人实体,大大提高了验证效率以及实验室建设的成本。
5.为达到上述目的,本发明的技术方案如下:
6.一种基于5g边缘计算的水下机器人的控制服务集成方法,包括以下步骤:
7.s1:服务器端采集水下机器人姿态,环境,以及高清摄像头数据。默认情况下,收集摄像头所捕获得环境图像,包括障碍物以及人的图像。
8.s2:通过图像处理模块,将摄像头捕获的图像进行处理,同时将图像传回5g通信模块。
9.s3:5g通信模块将机器人的姿态,环境以及图像数据上传至服务器端,并由服务器端转发给远端的客户端。
10.s4:客户端在接受到实时的水下机器人的状态信息后,使用本地的图形处理模块对传回的图像进行处理分析,同时使用本地控制模块对水下机器人的自身的姿态以及所处的环境信息进行分析处理,最后将控制消息通过5g通信模块发回给服务器端。
11.s5:服务器端在接受到控制消息后,将消息转发给水下机器人,如此循环控制。
12.进一步的步骤s2中的图形处理模块的处理过程如下:在收集摄像头的数据后,对
周身环境进行判断,检测环境中是否出现可能影响自身运动的物体或需要躲避的障碍物。
13.图像处理模块包括提示窗口,告警窗口,以及目标显示窗口。
14.进一步的步骤s2中所使用的图像识别算法为:unet算法用做图片分割,卷积神经网络(cnn)算法用作物体识别,分割与分类算法均使用pytorch框架。
15.进一步的步骤s2中所使用的5g通信模块采用rg500u
‑
cn模组,它可以自动适配5gnsa和sa双模网络,支持tdd和fdd两种模式,并支持双卡功能,其下行速率最高达到2.3gbps。
16.进一步的步骤s4中所发送的控制消息包括水下机器人的各个轴的线速度与角速度,以及水下机器人的夹爪的各个轴的运动角度和摄像头的转动角度。
17.相对于现有技术,本发明所述的一种基于5g边缘计算的水下机器人的控制服务集成方法具有以下优点:
18.本发明所述的一种基于5g边缘计算的水下机器人的控制服务集成方法,通过5g边缘计算大大提高了系统的实时性,同时在服务端将收集到的图像数据进行分析,提高了用户的体验感。同时由于5g边缘计算所带来的低延时的优点,使得研究机构可以不需要建设实际的实验场地以及对应的水下机器人实体,降低了成本。
附图说明
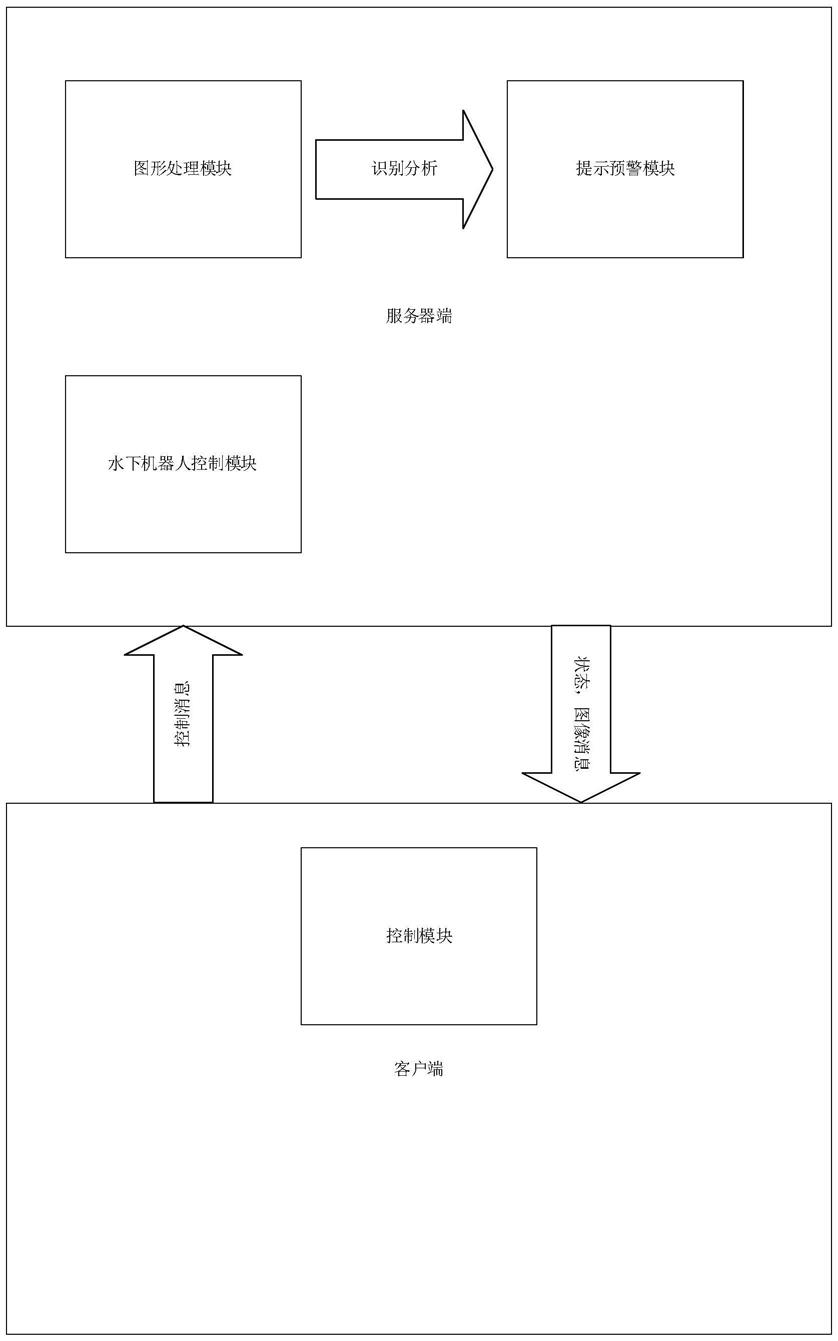
19.图1为本发明实施例所述的一种基于5g边缘计算的水下机器人的控制服务集成方法的功能逻辑图
具体实施方式
20.为了使相关从业人员能够更好的理解本发明的核心思想,下面参考附图进行详细说明本发明:
21.如图1所示,一种基于5g边缘计算的水下机器人的控制服务集成方法具有如下步骤:
22.s1:服务器端采集水下机器人姿态,环境,以及高清摄像头数据。默认情况下,收集摄像头所捕获得环境图像,包括障碍物以及人的图像。
23.s2:通过图像处理模块,将摄像头捕获的图像进行处理,同时将图像传回5g通信模块。
24.s3:5g通信模块将机器人的姿态,环境以及图像数据上传至服务器端,并由服务器端转发给远端的客户端。
25.s4:客户端在接受到实时的水下机器人的状态信息后,使用本地的图像处理模块对传回的图像进行处理分析,同时使用本地控制模块对水下机器人的自身的姿态以及所处的环境信息进行分析处理,最后将控制消息通过5g通信模块发回给服务器端。
26.s5:服务器端在接受到控制消息后,将消息转发给水下机器人,如此循环控制。
27.步骤s1中采集的数据包括水下机器人的姿态信息,以及其他相关的环境信息,同时对收集到的环境图像信息进行整理发送给图像处理模块,提前识别出可能影响到水下机器人运动的障碍物以及其他运动的物体。
28.步骤s2中图像处理模块的识别算法为:使用unet算法进行分割,将分割结果使用
cnn网络进行分类,实现提前识别障碍物的功能,同时图像处理模块是基于pytorch框架进行分析的。
29.图像处理模块的分析结果直接发送到服务器端,并且此信息也会由服务器端转发给客户端。
30.步骤s2中所使用的5g通信模块采用rg500u
‑
cn模组,它可以自动适配5g nsa和sa双模网络,支持tdd和fdd两种模式,并支持双卡功能,非常适合对实时性要求特别高的场景。
31.步骤s3中服务器端所转发的数据都会存储到本地,同时还会存储客户端所发出的控制指令,以便于后期复现整个操作过程。
32.服务器端硬件是采用高性能的多核心处理器,同时使用高可靠的dell服务器,它提供了高可靠的存储服务和便利远端的控制,对于后期服务器端的维护提供了便利。
33.5g边缘计算在靠近服务器端的位置提供了计算、存储和网络带宽。其具有低延迟,低带宽运行,隐私保护的优点。此设备部署需要有如下几个特性:
34.轻便性:安装需要相对简单快捷。
35.低延时性:提供高带宽,低延时的网络接入。
36.智能性:智能化处理采集的数据的能力。
37.以上说明仅为本发明的一个实施示例,对本发明进行了一个较为清晰的阐述。在本领域的技术,实施人员在进行具体的方案设计与实施时,均有可能进行改变。综上所述,本说明内容不是对本发明的限制。
技术特征:
1.一种基于5g边缘计算的水下机器人的控制服务集成方法,其特征包含以下步骤:s1:服务器端采集水下机器人姿态,环境,以及高清摄像头数据。默认情况下,收集摄像头所捕获得环境图像,包括障碍物以及人的图像。s2:通过图像处理模块,将摄像头捕获的图像进行处理,同时将图像传回5g通信模块。s3:5g通信模块将机器人的姿态,环境以及图像数据上传至服务器端,并由服务器端转发给远端的客户端。s4:客户端在接受到实时的水下机器人的状态信息后,使用本地的图形处理模块对传回的图像进行处理分析,同时使用本地控制模块对水下机器人的自身的姿态以及所处的环境信息进行分析处理,最后将控制消息通过5g通信模块发回给服务器端。s5:服务器端在接受到控制消息后,将消息转发给水下机器人,如此循环控制。2.根据权利1中所述的一种基于5g边缘计算的水下机器人的控制服务集成方法,特征包含步骤s2中的图像分析过程,图像经由服务端收集后,进行分析识别,检测出附近可能影响水下机器人运动的物体或人,并进行提示和预警。3.根据权利1中所述的一种基于5g边缘计算的水下机器人的控制服务集成方法,特征包含步骤s4中所描述的服务器端将处理后的水下机器人数据,包含自身姿态,环境信息,图像信息打包并通过5g通信模块发送给水下机器人控制客户端,客户端接收服务器端所发送的水下机器人数据,并使用本地控制算法对数据进行分析处理后,将控制信息返回给服务器端。随后服务器端根据客户端的控制消息对水下机器人实体进行控制的模式。4.根据权利1中所述的一种基于5g边缘计算的水下机器人的控制服务集成方法特征包括步骤s2中5g通信模块所使用的rg500u
‑
cn模组,它可以自动适配5g nsa和sa双模网络,支持tdd和fdd两种模式,并支持双卡功能,其下行速率最高达到2.3gbps。
技术总结
本发明提供了一种基于5G边缘计算的水下机器人的控制服务集成方法,5G边缘计算为远端客户端实时控制服务器端的水下机器人提供了极大的便利,优化了传统的通过缆线近端控制水下机器人实体的方法,极大的节约了使用单位的建造成本,由服务器端采集水下机器人所配备的传感器,姿态检测设备以及高清摄像头所产生的数据,经过处理后通过5G/4G通信模组发送给服务器端。用户可以提前在服务器端部署控制算法,也可以选择将数据接收至本地再进行处理,本发明所述的基于5G边缘计算的水下机器人的控制服务集成方法适用于不同的场景,使得使用者不需要构建实际的水下机器人的试验场地以及水下机器人本体也可以做到算法验证以及实时控制,提升了水下机器人的算法验证效率同时极大的降低了水下机器人的建设成本。极大的降低了水下机器人的建设成本。极大的降低了水下机器人的建设成本。
技术研发人员:赵旭 杨莎莎
受保护的技术使用者:联想新视界(南昌)人工智能工研院有限公司
技术研发日:2021.08.04
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。