1.本发明涉及管道焊接领域。更具体地说,本发明涉及一种适用于自动焊的短管固定工具。
背景技术:
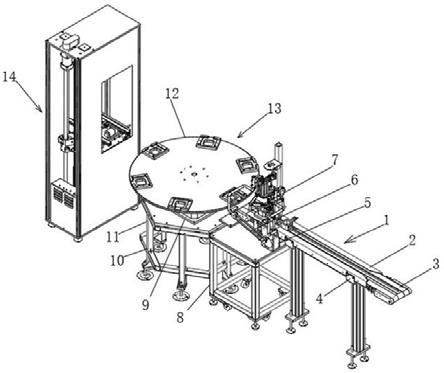
2.现在市场上流行的管路焊接机器人分为两种,一种是管路固定,枪头围绕焊缝旋转焊接。另一种是管路旋转,枪头固定在12点钟方向。两种方式比较,由于焊接方式的不断变化导致枪头旋转的焊接机器人在焊接参数、实际操作、稳定性方面都无法与枪头固定的焊接机器人相比,大规模工厂化的管路制作一般使用枪头固定式焊接机器人,然而由于需要管路旋转,因此制作的最短节管道的长度需要大于夹钳到焊枪的最短间距(如图1所示),故夹钳到焊枪的最短间距限制了长度小于夹钳到焊枪的最短间距的短管的智能化焊接。
技术实现要素:
3.本发明的一个目的是解决至少上述问题,并提供至少后面将说明的优点。
4.本发明还有一个目的是提供一种自动焊的短管固定工具,能够快速将短管同心延长,可较好的实现短管的智能化焊接。
5.为了实现根据本发明的这些目的和其它优点,提供了一种适用于自动焊的短管固定工具,其包括:
6.圆管,其外径不小于管路焊接机器人的夹钳最小夹持直径,所述圆管的一端外管壁连接有至少三根支杆,所述支杆沿所述圆管的径向设置,至少三根支杆等圆心角间隔分布;
7.托块,其数量与所述支杆数量相同,每一托块对应设置于一支杆末端,所述托块上沿所述圆管径向开设有方形通孔,所述方形通孔中穿设有可自由穿插活动的方管,所述托块的侧面还开设有贯穿至所述方形通孔的第一螺纹孔,所述第一螺纹孔中设置有与之匹配的第一丝杆,用以顶紧所述方管。
8.优选的是,所有支杆的长度均相同,所有方管的长度也相同,所述方管上沿自身长度方向设置有刻度,所述刻度的起点设置于所述方管远离所述圆管的一端。
9.优选的是,所述刻度设置于所述方管面向所述圆管另一端的外管壁上。
10.优选的是,所述方管远离所述圆管的一端设置有第一弧面板,所述第一弧面板的凹面朝向所述方管。
11.优选的是,所述方管远离所述圆管的一端覆盖连接有第一端板,所述第一端板中心设置有第二螺纹孔,所述第二螺纹孔中设置有与之匹配的第二丝杆,所述第二丝杆位于所述方管外的部分固接有第一螺母,以方便旋拧第二丝杆,所述第二丝杆位于所述方管外的端部设置有第一弹性金属片,所述第一弹性金属片背离所述方管的面上贴附有第一橡胶防滑层。
12.优选的是,所述方管靠近所述圆管的一端设置有第二弧面板,所述第二弧面板的
凸面朝向所述方管。
13.优选的是,所述方管接近所述圆管的一端覆盖连接有第二端板,所述第二端板中心设置有第三螺纹孔,所述第三螺纹孔中设置有与之匹配的第三丝杆,所述第三丝杆位于所述方管外的部分固接有第二螺母,以方便旋拧第三丝杆,所述第三丝杆位于所述方管外的端部设置有第二弹性金属片,第二弹性金属片两端均向中部卷曲,且所述第二弹性金属片的凸面朝向所述方管,,所述第二弹性金属片背离所述方管的面上贴附有第二橡胶防滑层。
14.优选的是,所有支杆的长度均相同,每一托块上转动连接有一托盘,所述托盘上固定一光电测距仪的发射端;
15.当方管远离圆管的一端顶撑在需要焊接的短管内壁,使短管与圆筒同轴时,所述发射端配置为垂直射向短管内壁,短管内壁上安放与每一光电测距仪发射端相对的反射端,或者当方管接近圆管的一端顶撑在需要焊接的短管外壁,使短管与圆筒同轴时,所述发射端配置为垂直射向短管外壁,短管外壁上安放与每一光电测距仪发射端相对的反射端;
16.所述短管固定工具还包括:控制单元,其与所有光电测距仪分别连接,用以接受每一光电测距仪的测得的距离值,当任一光电测距仪的测得的距离值与其他光电测距仪的测得的距离值的差大于预设阈值时,所示控制单元发出第一报警信号,所述控制单元还用于在任一光电测距仪未反馈测得的距离值时,发出第二报警信号。
17.本发明至少包括以下有益效果:通过设置托块和方管,让方管顶住需要焊接的短管,调节方管从托块中伸出的长度,直至短管与圆管同轴,再用第一丝杆固定方管,方管就可固定住需要焊接的短管,实现了短管与圆管的同轴延长,再将圆管夹持于管路焊接机器人的夹钳上,短管即可实现正常焊接,本发明克服了短管难以在管路焊接机器人上夹持焊接的问题。同时,由于方管可在方形通孔中自由穿插活动,故当需要定位固定的短管内径较大时,可调节方管向远离圆管的方向移动,让方管远离圆管的一端顶撑短管内壁,当需要定位固定的短管外径较小时,可调节方管向靠近圆管的方向移动,让方管靠近圆管的一端顶撑短管外壁,这样可对不同直径尺寸的短管进行定位固定,适用面广。
18.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
19.图1为本发明所述管路焊接机器人的结构示意图;
20.图2为本发明所述适用于自动焊的短管固定工具的俯视图;
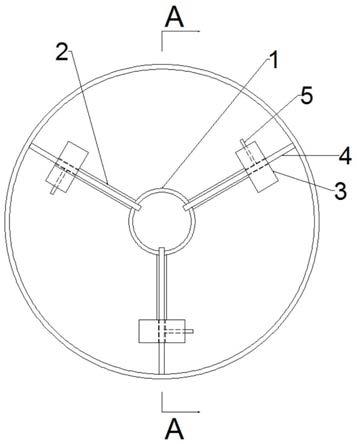
21.图3为本发明所述适用于自动焊的短管固定工具a
‑
a面的侧视图;
22.图4为本发明另一实施例所述适用于自动焊的短管拆卸工的俯视图;
23.图5为本发明又一实施例所述适用于自动焊的短管拆卸工的俯视图。
具体实施方式
24.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
25.需要说明的是,在本发明的描述中,术语“横向”、“纵向”、“上”、“下”、“前”、“后”、
“
左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
26.如图2~3所示,本发明提供一种适用于自动焊的短管固定工具,其包括:
27.圆管1,其外径不小于管路焊接机器人的夹钳最小夹持直径,所述圆管1的一端外管壁连接有至少三根支杆2,所述支杆2沿所述圆管1的径向设置,至少三根支杆2等圆心角间隔分布;
28.托块3,其数量与所述支杆2数量相同,每一托块3对应设置于一支杆2末端,所述托块3上沿所述圆管1径向开设有方形通孔,所述方形通孔中穿设有可自由穿插活动的方管4,所述托块3的侧面还开设有贯穿至所述方形通孔的第一螺纹孔,所述第一螺纹孔中设置有与之匹配的第一丝杆5,用以顶紧所述方管4。
29.具体的,圆管1为直径168mm,长度500mm的不锈钢管,支杆2设置有三根,三根支杆2120
°
圆心角等间隔的焊接在所述圆管1的一端外管壁上,三根支杆2长度相同,三个100*60*50mm的长方体状的托块3分别焊接在三个支杆2末端,理想的是,支杆2正好在其连接的托块3的面中心线上,托块3中心沿圆管1的径向掏出一个35*55mm的方形通孔,三根30*50mm的方管4分别自由穿插活动于三个方形通孔中,每个托块3一侧钻有直径为20mm第一螺纹孔,三根20mm的第一丝杠分别穿入三个第一螺纹孔,对各个托块3上的方管4分别固定。当然这里圆管1的长度仅作为示例说明,实际应用时,需要根据需要焊接的短管的长度,对圆管1的长度进行适应性调整,以满足短管固定工具与短管同轴连接后长度大于管路焊接机器人的夹钳至焊枪的最短间距。
30.上述实施例使用时,将需要焊接的短管轴线水平的放置于水平面上,若该短管内径较大,则将上述短管固定工具从该短管一端管口伸入该短管内部,先移动方管4,让方管4远离圆管1的一端顶撑短管内壁,稍微旋入第一丝杆5,让第一丝杆5抵住方管4,不使方管4因重力自动滑移,再仔细调节每根方管4从托块3中伸出的长度,三根方管4远离圆管1的一端从托块3中伸出的长度相同,则说明圆管1与该短管同轴,此时旋紧第一丝杆5即可;若该短管外径较小,则将短管一端管口对向三根方管4靠近圆管1的一端所夹区域,先移动方管4,让方管4靠近圆管1的一端顶住短管外壁,稍微旋入第一丝杆5,让第一丝杆5抵住方管4,不使方管4因重力自动滑移,再仔细调节每根方管4从托块3中伸出的长度,三根方管4远离圆管1的一端从托块3中伸出的长度相同,则说明圆管1与该短管同轴,此时旋紧第一丝杆5即可。
31.上述实施例中,让方管4顶住需要焊接的短管,调节方管4从托块3中伸出的长度,直至短管与圆管1同轴,再用第一丝杆5固定方管4,方管4就可固定住需要焊接的短管,实现了短管与圆管1的同轴延长,再将圆管1夹持于管路焊接机器人的夹钳上,短管即可实现正常焊接,本发明克服了短管难以在管路焊接机器人上夹持焊接的问题。同时,由于方管4可在方形通孔中自由穿插活动,故当需要定位固定的短管内径较大时,可调节方管4向远离圆管1的方向移动,让方管4远离圆管1的一端顶撑短管内壁,当需要定位固定的短管外径较小时,可调节方管4向靠近圆管1的方向移动,让方管4靠近圆管1的一端顶住短管外壁,这样可对不同直径尺寸的短管进行定位固定,适用面广。
32.在另一实施例中,所有支杆2的长度均相同,所有方管4的长度也相同,所述方管4上沿自身长度方向设置有刻度,所述刻度的起点设置于所述方管4远离所述圆管1的一端。本实施例在使用时,调整方管4远离所述圆管1的一端的伸出托块3的长度读数,当三根方管4伸出托块3的长度读数一致时,说明圆管1与需要焊接的短管同轴。本实施例中,无需肉眼观察方管4伸出托块3的长度,直接通过刻度读数判断,更加快捷准确。
33.在另一实施例中,所述刻度设置于所述方管4面向所述圆管1另一端的外管壁上,由于在上述短管固定工具同轴连接内径较大的短管时,方管4已探入短管内部,故在方管4外管壁其他部位设置刻度,均不方便读数,因此,本实施例中将刻度设置于所述方管4面向所述圆管1另一端的外管壁上。
34.在另一实施例中,如图4所示,所述方管4远离所述圆管1的一端设置有第一弧面板6,所述第一弧面板6的凹面朝向所述方管4。本实施例在使用时,当需要焊接的短管内径较大时,方管4远离所述圆管1的一端与短管内壁的线接触就转变为第一弧面板6与短管内壁的面接触,接触面变大连接更牢固,至于第一弧面板6的曲率可根据短管内径按需要进行调整。
35.在另一实施例中,如图5所示,所述方管4远离所述圆管1的一端覆盖连接有第一端板7,所述第一端板7中心设置有第二螺纹孔,所述第二螺纹孔中设置有与之匹配的第二丝杆8,所述第二丝杆8位于所述方管4外的部分固接有第一螺母9,以方便旋拧第二丝杆8,所述第二丝杆8位于所述方管4外的端部设置有第一弹性金属片10,所述第一弹性金属片10背离所述方管4的面上贴附有第一橡胶防滑层11。
36.由于在前一实施例中使用第一弧面板6,虽然增大了短管固定工具与需要焊接的短管间的接触面,但第一弧面板6尺寸固定,针对其他内径的短管仍然不适用。故上述实施例中通过设置第一端板7、第二丝杆8、第一弹性金属片10和第一橡胶防滑层11进行改善,上述实施例使用时,使用工具旋拧第一螺母9使第二丝杆8上的第一橡胶防滑层11抵在短管内壁,直至第一橡胶防滑层11完全贴合短管内壁,第二丝杆8无法继续旋出为止。因为第一弹性金属片10和第一橡胶防滑层11均具有弹性,故在第二丝杆8作用下均可变形形成适合不同内径短管内壁的曲面,适用面更广泛,另外,第一弹性金属片10在第二丝杆8作用下形成曲面时,因为第一弹性金属片10变形后有回复平面状态的趋势,使得第一弹性金属片10对第一橡胶防滑层11产生压力,进而增强了短管固定工具与需要焊接的短管间的摩擦力,使得短管固定工具与短管间的连接更牢固。
37.在另一实施例中,如图4所示,所述方管4靠近所述圆管1的一端设置有第二弧面板12,所述第二弧面板12的凸面朝向所述方管4。本实施例在使用时,当需要焊接的短管外径较小时,方管4靠近所述圆管1的一端与短管外壁的线接触就转变为第二弧面板12与短管外壁的面接触,接触面变大连接更牢固,至于第二弧面板12的曲率可根据短管外径按需要进行调整
38.在另一实施例中,如图5所示,所述方管4接近所述圆管1的一端覆盖连接有第二端板13,所述第二端板13中心设置有第三螺纹孔,所述第三螺纹孔中设置有与之匹配的第三丝杆14,所述第三丝杆14位于所述方管4外的部分固接有第二螺母,以方便旋拧第三丝杆14,所述第三丝杆14位于所述方管4外的端部设置有第二弹性金属片15,第二弹性金属片15两端均向中部卷曲,且所述第二弹性金属片15的凸面朝向所述方管4,所述第二弹性金属片
15背离所述方管4的面上贴附有第二橡胶防滑层16。
39.由于在前一实施例中使用第二弧面板12,虽然增大了短管固定工具与需要焊接的短管间的接触面,但第二弧面板12尺寸固定,针对其他外径的短管仍然不适用。故上述实施例中通过设置第二端板13、第三丝杆14、第二弹性金属片15和第二橡胶防滑层16进行改善,上述实施例使用时,使用工具旋拧第二螺母使第三丝杆14上的第二橡胶防滑层16靠近短管外壁,掰开卷曲的第二弹性金属片15,使第二橡胶防滑层16的部分紧贴在短管外壁,再继续旋拧第二螺母直至第二橡胶防滑层16完全贴合短管外壁,第三丝杆14无法继续旋出为止。因为第二弹性金属片15和第二橡胶防滑层16均具有弹性,故在第三丝杆14作用下均可变形形成适合不同外径短管外壁的曲面,适用面更广泛,另外,第二弹性金属片15在第三丝杆14作用下形成适合短管外壁的曲面时,因为第二弹性金属片15变形后有回复初始卷曲状态的趋势,使得第二弹性金属片15对第二橡胶防滑层16产生压力,进而增强了短管固定工具与需要焊接的短管间的摩擦力,使得短管固定工具与短管间的连接更牢固。
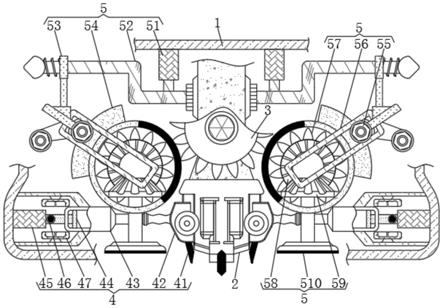
40.在另一实施例中,如图2所示,至少三根支杆2的长度均相同,每一托块3上转动连接有一托盘17,所述托盘17上固定一光电测距仪的发射端18;
41.具体的,因为上述短管固定工具在使用时,托块3背向支杆2的面在沿圆管1轴线方向上更靠近需要焊接的短管,故托盘17设置于托块3背向支杆2的面上,托盘17与托块3的转动连接方式可以是:在托块3背向支杆2的面上开设未贯穿至方形通孔的盲孔,在盲孔中设置转轴,在转轴末端同轴连接托盘17,光电测距仪的发射端18通过胶布粘贴固定在托盘17上,需要强调的是,所有托盘17在托块3上设置的位置必须是相同的,所有光电测距仪固定在托盘17上的位置也是相同的。
42.当方管4远离圆管1的一端顶撑在需要焊接的短管内壁,使短管与圆筒同轴时,所述发射端18配置为垂直射向短管内壁,短管内壁上安放与每一光电测距仪发射端18相对的反射端19,或者当方管4接近圆管1的一端顶撑在需要焊接的短管外壁,使短管与圆筒同轴时,所述发射端18配置为垂直射向短管外壁,短管外壁上安放与每一光电测距仪发射端18相对的反射端19;
43.所述短管固定工具还包括:控制单元,其与所有光电测距仪分别连接,用以接受每一光电测距仪的测得的距离值,当任一光电测距仪的测得的距离值与其他光电测距仪的测得的距离值的差大于预设阈值时,所示控制单元发出第一报警信号,所述控制单元还用于在任一光电测距仪未反馈测得的距离值时,发出第二报警信号。
44.更理想的是,控制单元可以与管路焊接机器人的控制中心通信连接,将第一报警信号和/或第二报警信号直接发给管路焊接机器人的控制中心,以使管路焊接机器人的控制中心接到第一报警信号和/或第二报警信号后停止焊接动作,当然还可以增设报警灯和蜂鸣器,让控制单元还分别与报警灯和蜂鸣器连接,以使报警灯接到第一报警信号和/或第二报警信号后开始闪烁,蜂鸣器灯接到第一报警信号和/或第二报警信号后开始鸣叫。
45.由于前面实施例在使用时,当需要焊接的短管与圆管1调节为同轴后,再将圆管1夹持于管路焊接机器人的夹钳上,短管进行正常焊接,短管在焊接过程中随圆管1及夹钳一同转动,然而,若焊接过程中短管与方管4间的连接松动,就会导致短管偏心,同时还有可能出现短管不随圆管1和夹钳一同转动,或者转动滞后现象,这几种情形都会导致焊接事故,需要重焊,费工费时。
46.故上述实施例对前面实施例中的短管固定工具进行了改善,增设了光电测距仪和控制单元。上述实施例使用时,初始情况下,短管与圆管1同轴,所有光电测距仪测得的距离值基本是相同的,此时,任一电测距仪的测得的距离值与其他光电测距仪的测得的距离值的差基本为零,或者在预设阈值(
±
α,α值根据短管外径调整)范围内,当短管偏心时,就会导致部分光电测距仪与短管的间距变大,还有部分光电测距仪与短管的间距变小,若任一电测距仪的测得的距离值与其他光电测距仪的测得的距离值的差大于预设阈值,我们就可判断短管已经偏心,需要马上停止焊接,避免事故扩大。另外,初始情况下,每一光电测距仪发射端18与反射段相对,若任一光电测距仪未反馈测得的距离值,则说明短管没有随圆管1和夹钳一同转动,导致光电测距仪的发射端18与反射段已经不再相对,因此可判断短管没有转动或者转动滞后,也需要马上停止焊接,避免事故扩大。
47.上述实施例通过设置光电测距仪和控制单元对焊接过程中短管的同轴度和转动情况进行检测,保证了短管焊接过程得到良好监控,可第一时间反馈问题,避免事故扩大。
48.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。